REKLAMA
Akty ujednolicone - rok 2022 poz. 1
ROZPORZĄDZENIE KOMISJI (UE) 2022/1379
z dnia 5 lipca 2022 r.
zmieniające rozporządzenie (UE) 2017/2400 w odniesieniu do określania emisji CO2 i zużycia paliwa przez średnie i ciężkie samochody ciężarowe oraz ciężkie autobusy oraz w celu uwzględnienia pojazdów elektrycznych i innych nowych technologii
(Tekst mający znaczenie dla EOG)
KOMISJA EUROPEJSKA,
uwzględniając Traktat o funkcjonowaniu Unii Europejskiej,
uwzględniając rozporządzenie (WE) nr 595/2009 Parlamentu Europejskiego i Rady z dnia 18 czerwca 2009 r. dotyczące homologacji typu pojazdów silnikowych i silników w odniesieniu do emisji zanieczyszczeń pochodzących z pojazdów ciężarowych o dużej ładowności (Euro VI) oraz w sprawie dostępu do informacji dotyczących naprawy i obsługi technicznej pojazdów (1), w szczególności jego art. 4 ust. 3 i art. 5 ust. 4 lit. e),
a także mając na uwadze, co następuje:
| (1) | Rozporządzeniem Komisji (UE) 2017/2400 (2) wprowadzono wspólną metodę umożliwiającą obiektywne porównanie działania pojazdów ciężkich wprowadzanych na rynek Unii pod względem emisji CO2 i zużycia paliwa. Określono w nim przepisy dotyczące certyfikacji części, które mają wpływ na emisję CO2 i zużycie paliwa przez pojazdy ciężkie, wprowadzono narzędzie symulacyjne w celu określania i zgłaszania poziomu emisji CO2 i zużycia paliwa przez te pojazdy oraz m.in. zobowiązano organy państw członkowskich i producentów do sprawdzania zgodności certyfikacji części i zgodności w zakresie użytkowania narzędzia symulacyjnego. |
| (2) | Rozporządzeniem Parlamentu Europejskiego i Rady (UE) 2018/858 (3) przeniesiono przepisy dotyczące dostępu do informacji z pokładowego układu diagnostycznego pojazdu oraz informacji dotyczących napraw i konserwacji pojazdu z rozporządzenia (WE) nr 595/2009. W celu dostosowania brzmienia rozporządzenia (UE) 2017/2400 do zmienionego brzmienia rozporządzenia (WE) nr 595/2009, należy usunąć z rozporządzenia (UE) 2017/2400 odniesienia do informacji z pokładowego układu diagnostycznego pojazdu oraz informacji dotyczących napraw i konserwacji pojazdu. |
| (3) | W rozporządzeniu (UE) 2017/2400 określono emisje CO2 i zużycie paliwa przez ciężkie samochody ciężarowe. Jednak w celu uzyskania lepszego zrozumienia w kwestii emisji CO2 należy obliczyć emisje CO2 dalszych pojazdów. Konieczne jest zatem określenie emisji CO2 i zużycia paliwa innych pojazdów ciężkich, a mianowicie średnich samochodów ciężarowych i ciężkich autobusów. |
| (4) | Aby odpowiednio uwzględnić przyszłe technologie, konieczne jest określenie dodatkowych wymogów dotyczących nowych technologii, takich jak hybrydowe pojazdy elektryczne i pojazdy wyłącznie elektryczne, pojazdy dwupaliwowe, odzysk ciepła odpadowego i zaawansowane systemy wspierania kierowców. |
| (5) | Ponieważ drogowa procedura badania weryfikacyjnego okazała się ważnym narzędziem weryfikacji obliczeń emisji CO2 i zużycia paliwa, właściwe jest, aby miała ona zastosowanie do średnich samochodów ciężarowych i nowych technologii. Ze względu na złożoność wieloetapowego systemu produkcji i homologacji, który ma zastosowanie do ciężkich autobusów, rozszerzenie na nie drogowej procedury badania weryfikacyjnego nie jest jednak obecnie możliwe. |
| (6) | Niektóre definicje i wymogi zawarte w rozporządzeniu (UE) 2017/2400 wymagają dalszych wyjaśnień i korekt, w tym dalszego dostosowania do norm emisji CO2 dla nowych pojazdów ciężkich określonych w rozporządzeniu Parlamentu Europejskiego i Rady (UE) 2019/1242 (4). |
| (7) | Aby zapewnić państwom członkowskim, organom krajowym i podmiotom gospodarczym wystarczającą ilość czasu na przygotowanie się do stosowania przepisów wprowadzonych niniejszym rozporządzeniem, należy odroczyć datę rozpoczęcia stosowania niniejszego rozporządzenia. |
| (8) | Ponieważ niektórzy producenci mogą uznać, że wolą spełnić wymogi określone w niniejszym rozporządzeniu przed datą rozpoczęcia jego stosowania, powinni mieć możliwość uzyskania licencji na użytkowanie narzędzia symulacyjnego i uzyskania certyfikacji części zgodnie z przepisami wprowadzonymi niniejszym rozporządzeniem przed datą rozpoczęcia jego stosowania. |
| (9) | W przypadku niektórych grup pojazdów i niektórych technologii narzędzie symulacyjne potrzebne do spełnienia obowiązku określenia i zadeklarowania emisji CO2 i zużycia paliwa przez nowe pojazdy będzie dostępne dopiero po dacie rozpoczęcia ogólnego stosowania niniejszego rozporządzenia. W tych przypadkach wymogi mogą obowiązywać dopiero od chwili udostępnienia narzędzia symulacyjnego. Z tego powodu niektóre przepisy niniejszego rozporządzenia stosuje się dopiero od późniejszej daty. |
| (10) | Środki przewidziane w niniejszym rozporządzeniu są zgodne z opinią Komitetu Technicznego ds. Pojazdów Silnikowych, |
PRZYJMUJE NINIEJSZE ROZPORZĄDZENIE:
Artykuł 1
W rozporządzeniu (UE) 2017/2400 wprowadza się następujące zmiany:
| 1) | art. 1 i 2 otrzymują brzmienie: "Artykuł 1 Przedmiot Niniejsze rozporządzenie stanowi uzupełnienie ram prawnych w odniesieniu do homologacji typu pojazdów silnikowych i silników w zakresie emisji ustanowionych rozporządzeniem (UE) nr 582/2011 poprzez ustanowienie zasad wydawania licencji na użytkowanie narzędzia symulacyjnego w celu określanie poziomu emisji CO2 i zużycia paliwa przez nowe pojazdy, które mają być sprzedawane, rejestrowane lub dopuszczone do ruchu w Unii oraz zasad obsługi narzędzia symulacyjnego i zgłaszania ustalonych w ten sposób wartości poziomu emisji CO2 i zużycia paliwa. Artykuł 2 Zakres 1. Z zastrzeżeniem art. 4 akapit drugi, niniejsze rozporządzenie ma zastosowanie do średnich samochodów ciężarowych, ciężkich samochodów ciężarowych i ciężkich autobusów. 2. W przypadku wieloetapowej homologacji typu lub dopuszczeń średnich i ciężkich samochodów ciężarowych, niniejsze rozporządzenie ma zastosowanie do podstawowych samochodów ciężarowych. W przypadku ciężkich autobusów niniejsze rozporządzenie ma zastosowanie do pojazdów podstawowych, pojazdów pośrednich oraz pojazdów kompletnych lub pojazdów skompletowanych. 3. Niniejszego rozporządzenia nie stosuje się do pojazdów terenowych, pojazdów specjalnego przeznaczenia i do pojazdów terenowych specjalnego przeznaczenia określonych odpowiednio w części A pkt 2.1, 2.2 i 2.3 w załączniku I do rozporządzenia Parlamentu Europejskiego i Rady (UE) 2018/858 (*1). (*1) Rozporządzenie Parlamentu Europejskiego i Rady (UE) 2018/858 z dnia 30 maja 2018 r. w sprawie homologacji i nadzoru rynku pojazdów silnikowych i ich przyczep oraz układów, komponentów i oddzielnych zespołów technicznych przeznaczonych do tych pojazdów, zmieniające rozporządzenie (WE) nr 715/2007 i (WE) nr 595/2009 oraz uchylające dyrektywę 2007/46/WE (Dz.U. L 151 z 14.6.2018, s. 1).";" |
| 2) | w art. 3 wprowadza się następujące zmiany:
|
| 3) | art. 4 otrzymuje brzmienie: "Artykuł 4 Grupy pojazdów Do celów niniejszego rozporządzenia pojazdy silnikowe klasyfikuje się w grupach pojazdów zgodnie z tabelami 1-6 w załączniku I. Art. 5-23 nie mają zastosowania do ciężkich samochodów ciężarowych należących do grup pojazdów 6, 7, 8, 13, 14, 15, 17, 18 i 19 określonych w tabeli 1 załącznika I oraz do średnich samochodów ciężarowych należących do grup pojazdów 51, 52, 55 i 56 określonych w tabeli 2 załącznika I, ani do żadnych pojazdów z napędzaną przednią osią należących do grup pojazdów 11, 12 i 16 określonych w tabeli 1 załącznika I."; |
| 4) | w art. 5 ust. 3 zdanie pierwsze otrzymuje brzmienie: "Narzędzie symulacyjne wykorzystuje się do celów określania poziomu emisji CO2 i zużycia paliwa przez nowe pojazdy."; |
| 5) | art. 5 ust. 5 otrzymuje brzmienie: "5. Narzędzia haszujące wykorzystuje się w celu ustanowienia jednoznacznego związku między certyfikowanymi właściwościami powiązanymi z emisjami CO2 i zużyciem paliwa w odniesieniu do części, oddzielnego zespołu technicznego lub układu a dokumentem certyfikacyjnym, jak również w celu ustanowienia jednoznacznego związku między pojazdem a dokumentacją jego producenta, dokumentacją pojazdu i dokumentacją informacyjną przeznaczoną dla klientów, jak określono w załączniku IV."; |
| 6) | w rozdziale 2 tytuł otrzymuje brzmienie: "LICENCJA NA UŻYTKOWANIE NARZĘDZIA SYMULACYJNEGO DO CELÓW HOMOLOGACJI TYPU W ODNIESIENIU DO EMISJI"; |
| 7) | w art. 6 wprowadza się następujące zmiany:
|
| 8) | art. 7 ust. 1 otrzymuje brzmienie: "1. Organ udzielający homologacji przyznaje licencję, jeżeli producent pojazdu złoży wniosek zgodnie z art. 6 i udowodni, że wymagania określone w załączniku II zostały spełnione w przypadku odnośnego przypadku zastosowania."; |
| 9) | w art. 8 wprowadza się następujące zmiany:
|
| 10) | w art. 9 wprowadza się następujące zmiany:
|
| 11) | w art. 10 ust. 3 dodaje się akapit w brzmieniu: "Jeżeli nieprawidłowe działanie narzędzia symulacyjnego wystąpi na jednym z etapów łańcucha produkcyjnego ciężkich autobusów przed etapem produkcji pojazdu kompletnego lub skompletowanego, obowiązek wynikający z art. 9 ust. 1 dotyczący użytkowania narzędzia symulacyjnego na kolejnych etapach produkcji zostaje odroczony o maksymalnie 14 dni kalendarzowych od dnia, w którym producent na poprzednim etapie udostępnił dokumentację pojazdu producentowi na etapie pojazdu kompletnego lub skompletowanego."; |
| 12) | w art. 11 ust. 1 i 2 otrzymują brzmienie: "1. Producent pojazdu przechowuje dokumentację producenta, dokumentację pojazdu i świadectwa dotyczące właściwości powiązanych z emisjami CO2 i zużyciem paliwa w odniesieniu do części, układów i oddzielnych zespołów technicznych przez okres co najmniej 20 lat od daty wyprodukowania pojazdu i udostępnia ją organowi udzielającemu homologacji i Komisji na ich wniosek. 2. Na wniosek upoważnionego podmiotu państwa członkowskiego lub Komisji producent pojazdu dostarcza dokumentację producenta lub dokumentację pojazdu w terminie 15 dni roboczych."; |
| 13) | w art. 12 wprowadza się następujące zmiany:
|
| 14) | w art. 13 wprowadza się następujące zmiany:
|
| 15) | w art. 14 wprowadza się następujące zmiany:
|
| 16) | w art. 15 wprowadza się następujące zmiany:
|
| 17) | w art. 16 wprowadza się następujące zmiany:
|
| 18) | w art. 17 wprowadza się następujące zmiany:
|
| 19) | w art. 18 ust. 1 akapit pierwszy wprowadza się następujące zmiany:
|
| 20) | w art. 20 wprowadza się następujące zmiany:
|
| 21) | w art. 21 wprowadza się następujące zmiany:
|
| 22) | w art. 22 wprowadza się następujące zmiany:
|
| 23) | w art. 23 wprowadza się następujące zmiany:
|
| 24) | w art. 24 wprowadza się następujące zmiany:
|
| 25) | załącznik I zastępuje się tekstem znajdującym się w załączniku I do niniejszego rozporządzenia; |
| 26) | w załączniku II wprowadza się zmiany zgodnie z załącznikiem II do niniejszego rozporządzenia; |
| 27) | załącznik III zastępuje się tekstem znajdującym się w załączniku III do niniejszego rozporządzenia; |
| 28) | załącznik IV zastępuje się tekstem znajdującym się w załączniku IV do niniejszego rozporządzenia; |
| 29) | w załączniku V wprowadza się zmiany zgodnie z załącznikiem V do niniejszego rozporządzenia; |
| 30) | w załączniku VI wprowadza się zmiany zgodnie z załącznikiem VI do niniejszego rozporządzenia; |
| 31) | w załączniku VII wprowadza się zmiany zgodnie z załącznikiem VII do niniejszego rozporządzenia; |
| 32) | w załączniku VIII wprowadza się zmiany zgodnie z załącznikiem VIII do niniejszego rozporządzenia; |
| 33) | załącznik IX zastępuje się tekstem znajdującym się w załączniku IX do niniejszego rozporządzenia; |
| 34) | w załączniku X wprowadza się zmiany zgodnie z załącznikiem X do niniejszego rozporządzenia; |
| 35) | załącznik Xa zastępuje się tekstem znajdującym się w załączniku XI do niniejszego rozporządzenia; |
| 36) | tekst załącznika XII do niniejszego rozporządzenia dodaje się jako załącznik Xb. |
Artykuł 2
Niniejsze rozporządzenie wchodzi w życie dwudziestego dnia po jego opublikowaniu w Dzienniku Urzędowym Unii Europejskiej.
Artykuł 3
Niniejsze rozporządzenie stosuje się od dnia 1 lipca 2022 r.
Niezależnie od akapitu pierwszego niniejszego artykułu, w celu ustalenia poziomu emisji CO2 oraz zużycia paliwa przez pojazdy należące do grup 1, 2, 3, 4, 5, 9, 10, 4v, 5v, 9v, 10v, 11, 12 i 16 określone w tabeli 1 w załączniku I, inne niż pojazdy ZE-HDV, pojazdy He-HDV, pojazdy dwupaliwowe oraz pojazdy, których silnik został certyfikowany z układem odzysku ciepła odpadowego, zgodnie z art. 9 ust. 1 rozporządzenia (UE) 2017/2400, niniejsze rozporządzenie stosuje się od dnia 1 stycznia 2024 r.
Niezależnie od akapitu pierwszego niniejszego artykułu, art. 1 pkt 35 stosuje się od dnia 1 stycznia 2023 r.
Niniejsze rozporządzenie wiąże w całości i jest bezpośrednio stosowane we wszystkich państwach członkowskich.
Sporządzono w Brukseli dnia 5 lipca 2022 r.
W imieniu Komisji
Ursula VON DER LEYEN
Przewodnicząca
(1) Dz.U. L 188 z 18.7.2009, s. 1.
(2) Rozporządzenie Komisji (UE) 2017/2400 z dnia 12 grudnia 2017 r. w sprawie wykonania rozporządzenia Parlamentu Europejskiego i Rady (WE) nr 595/2009 w odniesieniu do określania emisji CO2 i zużycia paliwa przez pojazdy ciężkie i zmieniające dyrektywę Parlamentu Europejskiego i Rady 2007/46/WE oraz rozporządzenie Komisji (UE) nr 582/2011 (Dz.U. L 349 z 29.12.2017, s. 1).
(3) Rozporządzenie Parlamentu Europejskiego i Rady (UE) 2018/858 z dnia 30 maja 2018 r. w sprawie homologacji i nadzoru rynku pojazdów silnikowych i ich przyczep oraz układów, komponentów i oddzielnych zespołów technicznych przeznaczonych do tych pojazdów, zmieniające rozporządzenie (WE) nr 715/2007 i (WE) nr 595/2009 oraz uchylające dyrektywę 2007/46/WE (Dz.U. L 151 z 14.6.2018, s. 1).
(4) Rozporządzenie Parlamentu Europejskiego i Rady (UE) 2019/1242 z dnia 20 czerwca 2019 r. określające normy emisji CO2 dla nowych pojazdów ciężkich oraz zmieniające rozporządzenia Parlamentu Europejskiego i Rady (WE) nr 595/2009 i (UE) 2018/956 oraz dyrektywę Rady 96/53/WE (Dz.U. L 198 z 25.7.2019, s. 202).
ZAŁĄCZNIK
WYKAZ ZAŁĄCZNIKÓW
| ZAŁĄCZNIK I | Klasyfikacja pojazdów w grupach pojazdów oraz metoda ustalania emisji CO2 i zużycia paliwa przez ciężkie autobusy |
| ZAŁĄCZNIK II | Wymagania i procedury związane z użytkowaniem narzędzia symulacyjnego |
| Dodatek 1 | Wzór dokumentu informacyjnego do celów użytkowania narzędzia symulacyjnego w celu określenia emisji CO2 i zużycia paliwa przez nowe pojazdy |
| Dodatek 2 | Wzór licencji na użytkowanie narzędzia symulacyjnego w celu określania emisji CO2 i zużycia paliwa przez nowe pojazdy |
| ZAŁĄCZNIK III | Informacje wejściowe dotyczące właściwości pojazdu |
| Dodatek 1 | Technologie stosowane w pojazdach, w przypadku których nie mają zastosowania zobowiązania określone w art. 9 ust. 1 akapit pierwszy, jak przewidziano w tym akapicie |
| ZAŁĄCZNIK IV | Wzór plików wyjściowych narzędzia symulacyjnego |
| ZAŁĄCZNIK V | Weryfikacja danych dotyczących silnika |
| Dodatek 1 | Wzór świadectwa dotyczącego części, oddzielnego zespołu technicznego lub układu |
| Dodatek 2 | Dokument informacyjny dotyczący silnika |
| Dodatek 3 | Rodzina silników CO2 |
| Dodatek 4 | Zgodność właściwości powiązanych z emisjami CO2 i zużyciem paliwa |
| Dodatek 5 | Określenie poboru mocy przez części silnika |
| Dodatek 6 | Oznakowania |
| Dodatek 7 | Parametry wejściowe do narzędzia symulacyjnego |
| Dodatek 8 | Ważne etapy oceny i równania wykonywane przez narzędzie do wstępnego przetwarzania danych dotyczących silnika |
| ZAŁĄCZNIK VI | Weryfikowanie danych dotyczących przekładni, przemiennika momentu obrotowego, innej części przenoszącej moment obrotowy oraz dodatkowej części układu przeniesienia napędu |
| Dodatek 1 | Wzór świadectwa dotyczącego części, oddzielnego zespołu technicznego lub układu |
| Dodatek 2 | Dokument informacyjny dotyczący przekładni |
| Dodatek 3 | Dokument informacyjny dotyczący hydrodynamicznego przemiennika momentu obrotowego (TC) |
| Dodatek 4 | Dokument informacyjny dotyczący innych części przenoszących moment obrotowy (OTTC) |
| Dodatek 5 | Dokument informacyjny dotyczący dodatkowych części układu przeniesienia napędu (ADC) |
| Dodatek 6 | Pojęcie rodziny |
| Dodatek 7 | Oznakowania i numeracja |
| Dodatek 8 | Standardowe wartości strat momentu obrotowego - przekładnia |
| Dodatek 9 | Przemiennik momentu obrotowego - model ogólny |
| Dodatek 10 | Standardowe wartości strat momentu obrotowego - inne części przenoszące moment obrotowy |
| Dodatek 11 | Standardowe wartości strat momentu obrotowego - przekładniowy napęd kątowy lub część układu napędowego z pojedynczym wskaźnikiem prędkości |
| Dodatek 12 | Parametry wejściowe do narzędzia symulacyjnego |
| ZAŁĄCZNIK VII | Weryfikacja danych dotyczących osi |
| Dodatek 1 | Wzór świadectwa dotyczącego części, oddzielnego zespołu technicznego lub układu |
| Dodatek 2 | Dokument informacyjny dotyczący osi |
| Dodatek 3 | Obliczanie standardowej straty momentu obrotowego |
| Dodatek 4 | Pojęcie rodziny |
| Dodatek 5 | Oznakowania i numeracja |
| Dodatek 6 | Parametry wejściowe do narzędzia symulacyjnego |
| ZAŁĄCZNIK VIII | Weryfikacja danych dotyczących oporu powietrza |
| Dodatek 1 | Wzór świadectwa dotyczącego części, oddzielnego zespołu technicznego lub układu |
| Dodatek 2 | Dokument informacyjny dotyczący oporu powietrza |
| Dodatek 3 | Wymagania dotyczące wysokości samochodów ciężarowych jednoczłonowych i ciągników |
| Dodatek 4 | Konfiguracje standardowych rodzajów nadwozia i naczep dla samochodów ciężarowych jednoczłonowych i ciągników |
| Dodatek 5 | Rodzina oporu powietrza |
| Dodatek 6 | Ocena zgodności certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa |
| Dodatek 7 | Wartości standardowe |
| Dodatek 8 | Oznakowania |
| Dodatek 9 | Parametry wejściowe do narzędzia symulacyjnego |
| ZAŁĄCZNIK IX | Weryfikowanie danych dotyczących urządzeń pomocniczych samochodów ciężarowych i autobusów |
| ZAŁĄCZNIK X | Procedura certyfikacji dotycząca opon pneumatycznych |
| Dodatek 1 | Wzór świadectwa dotyczącego części, oddzielnego zespołu technicznego lub układu |
| Dodatek 2 | Dokument informacyjny dotyczący współczynnika oporu toczenia opon |
| Dodatek 3 | Parametry wejściowe do narzędzia symulacyjnego |
| Dodatek 4 | Numeracja |
| ZAŁĄCZNIK Xa | Zgodność użytkowania narzędzia symulacyjnego oraz właściwości powiązanych z emisjami CO2 i zużyciem paliwa w odniesieniu do części, oddzielnych zespołów technicznych i układów: procedura badania weryfikacyjnego |
| Dodatek 1 | Główne etapy oceny i równania wykonywane przez narzędzie symulacyjne podczas symulacji procedury badania weryfikacyjnego |
| ZAŁĄCZNIK Xb | Certyfikacja części elektrycznego mechanizmu napędowego |
| Dodatek 1 | Wzór świadectwa dotyczącego części, oddzielnego zespołu technicznego lub układu |
| Dodatek 2 | Dokument informacyjny dotyczący układu maszyny elektrycznej |
| Dodatek 3 | Dokument informacyjny dotyczący zintegrowanego elektrycznego układu przeniesienia napędu |
| Dodatek 4 | Dokument informacyjny dotyczący zintegrowanego układu przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 |
| Dodatek 5 | Dokument informacyjny dotyczący układu akumulatorów lub typu reprezentatywnych podukładów akumulatorów |
| Dodatek 6 | Dokument informacyjny dotyczący układu kondensatorów lub typu reprezentatywnych podukładów kondensatorów |
| Dodatek 7 | - |
| Dodatek 8 | Wartości standardowe dla układu maszyny elektrycznej |
| Dodatek 9 | Wartości standardowe dla zintegrowanego elektrycznego układu przeniesienia napędu |
| Dodatek 10 | Wartości standardowe dla układu magazynowania energii wielokrotnego ładowania (REESS) |
| Dodatek 11 | - |
| Dodatek 12 | Ocena zgodności certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa |
| Dodatek 13 | Pojęcie rodziny |
| Dodatek 14 | Oznakowania i numeracja |
| Dodatek 15 | Parametry wejściowe do narzędzia symulacyjnego |
| ZAŁĄCZNIK XI | Zmiany w dyrektywie 2007/46/WE |
ZAŁĄCZNIK I
KLASYFIKACJA POJAZDÓW W GRUPACH POJAZDÓW ORAZ METODA USTALANIA EMISJI CO2 I ZUŻYCIA PALIWA PRZEZ CIĘŻKIE AUTOBUSY
1. Klasyfikacja pojazdów do celów niniejszego rozporządzenia
| 1.1 | Klasyfikacja pojazdów kategorii N Tabela 1 Grupy pojazdów w przypadku ciężkich samochodów ciężarowych
Tabela 2 Grupy pojazdów w przypadku średnich samochodów ciężarowych
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 1.2. | Klasyfikacja pojazdów kategorii M |
| 1.2.1. | Ciężkie autobusy |
| 1.2.2. | Klasyfikacja pojazdów podstawowych Tabela 3 Grupy pojazdów w przypadku pojazdów podstawowych
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 1.2.3. | Klasyfikacja pojazdów kompletnych i skompletowanych Klasyfikacja pojazdów kompletnych i skompletowanych, które są ciężkimi autobusami, opiera się na następujących sześciu kryteriach:
Rysunek 1 Schemat decyzyjny na potrzeby ustalenia, czy pojazd posiada obniżone wejście: 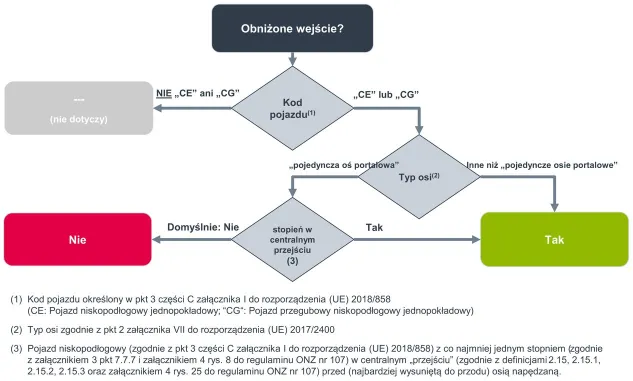 Odpowiednią klasyfikację, którą należy zastosować, przedstawiono w tabelach 4, 5 i 6. Tabela 4 Grupy pojazdów w przypadku pojazdów kompletnych i skompletowanych, które są ciężkimi autobusami z 2 osiami
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Tabela 5
Grupy pojazdów w przypadku pojazdów kompletnych i skompletowanych, które są ciężkimi autobusami z 3 osiami
| Opis elementów istotnych w kontekście klasyfikacji pojazdów w grupach pojazdów | Grupa pojazdów | Podział ze względu na profil zadań | ||||||||||||||||
| Liczba osi | Konfiguracja podwozia (tylko wyjaśnienie) | Kod pojazdu (*7) | Klasa pojazdu (*8) | Obniżone wejście (tylko kod pojazdu CE lub CG) | Siedzenia pasażerskie na dolnym pokładzie (tylko kod pojazdu CB lub CD) | Wysokość nadwozia zintegrowanego w [mm] (tylko klasa pojazdu "II + III") | ||||||||||||
| I | I + II lub A | II | II + III | III lub B | Ciężki miejski | Miejski | Podmiejski | Międzymiastowy | Autokar | |||||||||
| 3 | pojazd jednoczłonowy | LF | SD | CE | x | x | x |
|
| nie | - | - | 33a | x | x | x |
|
|
| x | x |
|
|
| tak | - | - | 33b1 | x | x | x |
|
| |||||
|
|
| x |
|
| tak | - | - | 33b2 | x | x | x | x |
| |||||
| DD | CF | x | x | x |
|
| - | - | - | 33c | x | x | x |
|
| |||
| otwarty dach | SD | CI | x | x | x | x | x | - | - | - | 33d | x | x | x |
|
| ||
| DD | CJ | x | x | x | x | x | - | - | - | 33e | x | x | x |
|
| |||
| HF | SD | CA |
|
| x |
|
| - | - | - | 34a |
|
|
| x | x | ||
|
|
|
| x |
| - | - | ≤ 3 100 | 34b |
|
|
| x | x | |||||
|
|
|
| x |
| - | - | > 3 100 | 34c |
|
|
| x | x | |||||
|
|
|
|
| x | - | - | - | 34d |
|
|
| x | x | |||||
| DD | CB |
|
| x | x | x | - | ≤ 6 | - | 34e |
|
|
| x | x | |||
|
|
| x | x | x | - | > 6 | - | 34f |
|
|
| x | x | |||||
| przegubowy | LF | SD | CG | x | x | x |
|
| nie | - | - | 35a | x | x | x |
|
| |
| x | x |
|
|
| tak | - | - | 35b1 | x | x | x |
|
| |||||
|
|
| x |
|
| tak | - | - | 35b2 | x | x | x | x |
| |||||
| DD | CH | x | x | x |
|
| - | - | - | 35c | x | x | x |
|
| |||
| HF | SD | CC |
|
| x |
|
| - | - | - | 36a |
|
|
| x | x | ||
|
|
|
| x |
| - | - | ≤ 3 100 | 36b |
|
|
| x | x | |||||
| SD |
|
|
| x |
| - | - | > 3 100 | 36c |
|
|
| x | x | ||||
|
|
|
|
| x | - | - | - | 36d |
|
|
| x | x | |||||
| DD | CD |
|
| x | x | x | - | ≤ 6 | - | 36e |
|
|
| x | x | |||
|
|
| x | x | x | - | > 6 | - | 36f |
|
|
| x | x | |||||
Tabela 6
Grupy pojazdów w przypadku pojazdów kompletnych i skompletowanych, które są ciężkimi autobusami z 4 osiami
| Opis elementów istotnych w kontekście klasyfikacji pojazdów w grupach pojazdów | Grupa pojazdów | Podział ze względu na profil zadań | ||||||||||||||||
| Liczba osi | Konfiguracja podwozia (tylko wyjaśnienie) | Kod pojazdu (*9) | Klasa pojazdu (*10) | Obniżone wejście (tylko kod pojazdu CE lub CG) | Siedzenia pasażerskie na dolnym pokładzie (tylko kod pojazdu CB lub CD) | Wysokość nadwozia zintegrowanego w [mm] (tylko klasa pojazdu "II + III") | ||||||||||||
| I | I + II lub A | II | II + III | III lub B | Ciężki miejski | Miejski | Podmiejski | Międzymiastowy | Autokar | |||||||||
| 4 | pojazd jednoczłonowy | LF | SD | CE | x | x | x |
|
| nie | - | - | 37a | x | x | x |
|
|
| x | x |
|
|
| tak | - | - | 37b1 | x | x | x |
|
| |||||
|
|
| x |
|
| tak | - | - | 37b2 | x | x | x | x |
| |||||
| DD | CF | x | x | x |
|
| - | - | - | 37c | x | x | x |
|
| |||
| otwarty dach | SD | CI | x | x | x | x | x | - | - | - | 37d | x | x | x |
|
| ||
| DD | CJ | x | x | x | x | x | - | - | - | 37e | x | x | x |
|
| |||
| HF | SD | CA |
|
| x |
|
| - | - | - | 38a |
|
|
| x | x | ||
|
|
|
| x |
| - | - | ≤ 3 100 | 38b |
|
|
| x | x | |||||
|
|
|
| x |
| - | - | > 3 100 | 38c |
|
|
| x | x | |||||
|
|
|
|
| x | - | - | - | 38d |
|
|
| x | x | |||||
| DD | CB |
|
| x | x | x | - | ≤ 6 | - | 38e |
|
|
| x | x | |||
|
|
| x | x | x | - | > 6 | - | 38f |
|
|
| x | x | |||||
| przegubowy | LF | SD | CG | x | x | x |
|
| nie | - | - | 39a | x | x | x |
|
| |
| x | x |
|
|
| tak | - | - | 39b1 | x | x | x |
|
| |||||
|
|
| x |
|
| tak | - | - | 39b2 | x | x | x | x |
| |||||
| DD | CH | x | x | x |
|
| - | - | - | 39c | x | x | x |
|
| |||
| HF | SD | CC |
|
| x |
|
| - | - | - | 40a |
|
|
| x | x | ||
|
|
|
| x |
| - | - | ≤ 3 100 | 40b |
|
|
| x | x | |||||
| SD |
|
|
| x |
| - | - | > 3 100 | 40c |
|
|
| x | x | ||||
|
|
|
|
| x | - | - | - | 40d |
|
|
| x | x | |||||
| DD | CD |
|
| x | x | x | - | ≤ 6 | - | 40e |
|
|
| x | x | |||
|
|
| x | x | x | - | > 6 | - | 40f |
|
|
| x | x | |||||
2. Metoda ustalania emisji CO2 i zużycia paliwa przez ciężkie autobusy
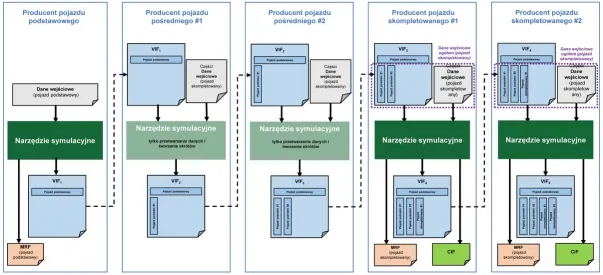
| 2.1. | W przypadku ciężkich autobusów specyfikacje pojazdów kompletnych lub skompletowanych obejmujących właściwości nadwozia w ostatecznej postaci i urządzeń pomocniczych odzwierciedla się w wynikach dotyczących emisji CO2 i zużycia paliwa. W przypadku ciężkich autobusów produkowanych etapowo w generowanie danych wejściowych i informacji wejściowych, a także w obsługę narzędzia symulacyjnego, może być zaangażowany więcej niż jeden producent. Poziomy emisji CO2 i zużycia paliwa przez ciężkie autobusy powinny się opierać się na następujących dwóch różnych symulacjach:
|
| 2.2. | Jeżeli ciężki autobus jest homologowany przez producenta jako pojazd kompletny, symulacje przeprowadza się zarówno dla pojazdu podstawowego, jak i pojazdu kompletnego. |
| 2.3. | W przypadku pojazdu podstawowego dane wejściowe do narzędzia symulacyjnego obejmują dane wejściowe dotyczące silnika, przekładni, opon oraz informacje wejściowe dla podzbioru urządzeń pomocniczych (6). Podziału na grupy pojazdów dokonuje się zgodnie z tabelą 3 na podstawie liczby osi oraz informacji, czy pojazd jest autobusem przegubowym. W symulacjach dotyczących pojazdu podstawowego narzędzie symulacyjne przydziela zestaw czterech różnych ogólnych typów nadwozi (nadwozie wysokopołogowe i niskopodłogowe, jednopokładowe i dwupokładowe) i symuluje 11 profili zadań wymienionych w tabeli 3 dla każdej grupy pojazdów w dwóch różnych zbiorach warunków obciążenia. W efekcie daje to zbiór 22 wyników dotyczących emisji CO2 i zużycia paliwa dla podstawowego ciężkiego autobusu. Narzędzie symulacyjne generuje dokumentację pojazdu dla etapu wstępnego (VIF1) zawierającą wszystkie niezbędne dane, które należy przekazać do kolejnego etapu produkcji. Dokumentacja pojazdu (VIF1) obejmuje wszystkie jawne dane wejściowe, wyniki dotyczące zużycia energii (7) w [MJ/km], informacje o producencie pojazdu podstawowego i odpowiednie skróty (8). |
| 2.4. | Producent pojazdu podstawowego udostępnia dokumentację pojazdu (VIF1) producentowi odpowiedzialnemu za kolejny etap produkcji. W przypadku gdy producent pojazdu podstawowego przekazuje dane wykraczające poza dane określone w załączniku III wymagania dotyczące pojazdu podstawowego, dane te nie wpływają na wyniki symulacji dla pojazdu podstawowego, ale zapisuje się je w dokumentacji pojazdu (VIF1) w celu uwzględnienia na dalszych etapach. Ponadto w przypadku pojazdu podstawowego narzędzie symulacyjne generuje dokumentację producenta. |
| 2.5. | W przypadku pojazdu pośredniego producent pojazdu pośredniego jest odpowiedzialny za podzbiór odpowiednich danych wejściowych i informacji wejściowych dotyczących nadwozia w ostatecznej postaci (9). Producent pojazdu pośredniego nie występuje o certyfikację pojazdu skompletowanego. Producent pojazdu pośredniego dodaje lub aktualizuje istotne informacje dotyczące pojazdu skompletowanego i obsługuje narzędzie symulacyjne, aby uzyskać zaktualizowaną i opatrzoną skrótami wersję dokumentacji pojazdu (VIFi) (10). Dokumentację pojazdu (VIFi) należy udostępnić producentowi odpowiedzialnemu za kolejny etap produkcji. W przypadku pojazdu pośredniego dokumentacja pojazdu (VIFi) obejmuje również zadanie sporządzenia dokumentacji dla organów udzielających homologacji. W odniesieniu do pojazdu pośredniego nie przeprowadza się symulacji emisji CO2 ani zużycia paliwa. |
| 2.6. | Jeżeli producent dokonuje modyfikacji w pojeździe pośrednim, kompletnym lub skompletowanym, które wymagałyby aktualizacji danych wejściowych lub informacji wejściowych przypisanych do pojazdu podstawowego (np. zmiana osi lub opon), producent dokonujący modyfikacji działa jako producent pojazdu podstawowego i spełnia odpowiednie obowiązki. |
| 2.7. | W przypadku pojazdu kompletnego lub skompletowanego producent uzupełnia i, w razie potrzeby, aktualizuje dane wejściowe i informacje wejściowe dotyczące nadwozia w ostatecznej postaci przekazane w dokumentacji pojazdu (VIFi) z poprzedniego etapu produkcji oraz obsługuje narzędzie symulacyjne w celu obliczenia emisji CO2 i zużycia paliwa. Na potrzeby symulacji na tym etapie ciężkie autobusy klasyfikuje się na podstawie sześciu kryteriów określonych w pkt 1.2.3 w odniesieniu do grup pojazdów wymienionych w tabelach 4, 5 i 6. W celu określenia emisji CO2 i zużycia paliwa pojazdów kompletnych lub skompletowanych, które są ciężkimi autobusami, narzędzie symulacyjne przeprowadza następujące etapy obliczeń:
|
(*1) ESM - europejski system modułowy.
(*2) W ramach tych klas pojazdów ciągniki traktuje się jak samochody ciężarowe jednoczłonowe, przy czym w ich przypadku dolicza się masę własną ciągnika.
(*3) Podgrupa "v" grup pojazdów 4, 5, 9 i 10: te profile zadań mają zastosowanie wyłącznie do pojazdów specjalistycznych.
| T | = | ciągnik |
| R | = | samochód ciężarowy jednoczłonowy i standardowe nadwozie |
| T1, T2 | = | standardowe przyczepy |
| ST | = | standardowa naczepa |
| D | = | standardowy wózek jednoosiowy podpierający naczepę |
(*4) ESM - europejski system modułowy.
| R | = | standardowe nadwozie |
| I | = | samochód dostawczy z nadwoziem zintegrowanym |
| FWD | = | napęd na przednie koła |
| RWD | = | pojedyncza oś napędzana, która nie jest osią przednią |
| AWD | = | więcej niż jedna oś napędzana |
(1) "P" wskazuje na podstawowy etap klasyfikacji; dwie liczby oddzielone ukośnikiem wskazują numery grup pojazdów, do których pojazd może być przydzielony na etapie pojazdu kompletnego lub skompletowanego.
(2) "Niskopodłogowy" odnosi się do kodów pojazdu "CE", "CF", "CG", "CH", jak określono w części C pkt 3 załącznika I do rozporządzenia (UE) 2018/858.
"Wysokopodłogowy" odnosi się do kodów pojazdu "CA", "CB", "CC", "CD", jak określono w części C pkt 3 załącznika I do rozporządzenia (UE) 2018/858.
(3) "SD" oznacza pojazdy jednopokładowe, "DD" oznacza pojazdy dwupokładowe.
(4) Regulamin nr 107 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące homologacji pojazdów kategorii M2 i M3 w odniesieniu do ich budowy ogólnej, Dz.U. L 52 z 23.2.2018, s. 1.
(5) Rozporządzenie wykonawcze Komisji (UE) 2020/683 z dnia 15 kwietnia 2020 r. w sprawie wykonania rozporządzenia Parlamentu Europejskiego i Rady (UE) 2018/858 w odniesieniu do wymogów administracyjnych dotyczących homologacji i nadzoru rynku pojazdów silnikowych i ich przyczep oraz układów, komponentów i oddzielnych zespołów technicznych przeznaczonych do tych pojazdów (Dz.U. L 163 z 26.5.2020, s. 1).
(*5) Zgodnie z rozporządzeniem (UE) 2018/858.
(*6) Zgodnie z pkt 2 regulaminu ONZ nr 107.
(*7) Zgodnie z rozporządzeniem (UE) 2018/858.
(*8) Zgodnie z pkt 2 regulaminu ONZ nr 107.
(*9) Zgodnie z rozporządzeniem (UE) 2018/858.
(*10) Zgodnie z pkt 2 regulaminu ONZ nr 107.
(6) Dane wejściowe i informacje wejściowe określone w załączniku III dla pojazdów podstawowych.
(7) Wyniki dotyczące poziomów emisji CO2 i zużycia paliwa nie muszą być przekazane w dokumentacji pojazdu, ponieważ informacje te można obliczyć na podstawie wyników dotyczących zużycia energii i znanego rodzaju paliwa.
(8) Treść dokumentacji pojazdu wyszczególniono w załączniku IV części III.
(9) Podzbiór danych wejściowych i informacji wejściowych określonych w załączniku III dla pojazdów kompletnych i skompletowanych.
(10) "i" oznacza liczbę etapów w dotychczasowym procesie produkcji.
(11) Zob. załącznik IV część III pkt 1.1.
ZAŁĄCZNIK II
W załączniku II wprowadza się następujące zmiany:
| (1) | pkt 1.1.1 lit. c) otrzymuje brzmienie:
|
| (2) | w pkt 2.1 wprowadza się następujące zmiany:
|
| (3) | w dodatku 1 sekcja I wprowadza się następujące zmiany:
|
| (4) | w dodatku 2 sekcja I pkt 0.1, 0.2 i 0.3 otrzymują brzmienie:
(*1) Dz.U. L 349 z 29.12.2017, s. 1."." |
(*1) Dz.U. L 349 z 29.12.2017, s. 1."."
ZAŁĄCZNIK III
"ZAŁĄCZNIK III
INFORMACJE WEJŚCIOWE DOTYCZĄCE WŁAŚCIWOŚCI POJAZDU
1. Wprowadzenie
W niniejszym załączniku przedstawiono wykaz parametrów, które producent pojazdu musi dostarczyć, ponieważ pełnią one funkcje informacji wejściowych wykorzystywanych przez narzędzie symulacyjne. Obowiązujący schemat XML oraz przykładowe dane zostały udostępnione na dedykowanej platformie dystrybucji elektronicznej.
2. Definicje
| (1) | »numer identyfikacyjny parametru«: niepowtarzalny numer identyfikacyjny stosowany w narzędziu symulacyjnym w odniesieniu do określonego parametru wejściowego lub zbioru danych wejściowych; |
| (2) | »typ«: typ danych parametru
|
| (3) | »jednostka« … jednostka fizyczna danego parametru; |
| (4) | »skorygowana rzeczywista masa pojazdu« oznacza »rzeczywistą masę pojazdu« określoną zgodnie z rozporządzeniem Komisji (UE) nr 1230/2012 (*), z wyjątkiem zbiornika lub zbiorników, które wypełnia się co najmniej do 50 % ich pojemności. Układy zawierające płyny (z wyjątkiem układów zawierających zużytą wodę, które muszą pozostać puste) wypełnia się do 100 % pojemności określonej przez producenta. W przypadku średnich samochodów ciężarowych jednoczłonowych, ciężkich samochodów ciężarowych jednoczłonowych i ciągników masę oblicza się bez konstrukcji nośnej i koryguje o dodatkową masę niezamontowanego standardowego wyposażenia określonego w pkt 4.3. Narzędzie symulacyjne automatycznie dodaje masę standardowego nadwozia, standardowej naczepy lub standardowej przyczepy, aby odtworzyć parametry kompletnego pojazdu lub kompletnego połączenia pojazdu z przyczepą (lub naczepą). Wszystkie elementy zamontowane na głównym szkielecie pojazdu i ponad tym szkieletem uznaje się za elementy struktury nośnej, jeżeli zamontowano je wyłącznie w celu wzmocnienia struktury nośnej, niezależnie od części niezbędnych do utrzymania pojazdu w stanie gotowym do jazdy. W przypadku ciężkich autobusów będących pojazdami podstawowymi »skorygowana rzeczywista masa pojazdu« nie ma zastosowania, ponieważ narzędzie symulacyjne przypisuje ogólną wartość masy; |
| (5) | »wysokość nadwozia zintegrowanego« oznacza różnicę w kierunku »Z« między punktem odniesienia »A« najwyższego punktu a najniższym punktem »B« nadwozia zintegrowanego (zob. rysunek 1). W odniesieniu do pojazdów odbiegających od przypadku standardowego zastosowanie mają następujące przypadki (zob. rysunek 2):
We wszystkich pozostałych przypadkach nieujętych w przypadkach standardowych lub przypadkach specjalnych 1-4, wysokość nadwozia zintegrowanego stanowi różnicę między najwyższym punktem pojazdu a punktem B. Parametr ten dotyczy wyłącznie ciężkich autobusów. Rysunek 1 Wysokość nadwozia zintegrowanego - przypadek standardowy 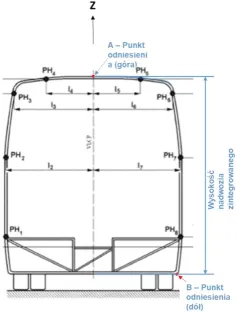 Rysunek 2 Wysokość nadwozia zintegrowanego - przypadki szczególne 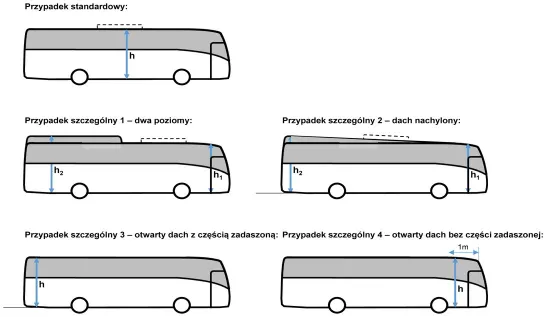 |
| (6) | punkt odniesienia »A« oznacza najwyższy punkt nadwozia (rys. 1). Nie uwzględnia się paneli nadwozia lub paneli dekoracyjnych, wsporników do montażu m.in. systemów ogrzewania, wentylacji i klimatyzacji, klap i podobnych elementów; |
| (7) | punkt odniesienia »B« oznacza najniższy punkt na niższej zewnętrznej krawędzi nadwozia (rys. 1). Nie uwzględnia się wsporników np. do montażu osi; |
| (8) | »długość pojazdu« oznacza odnośny wymiar pojazdu zgodnie z tabelą I w dodatku 1 do załącznika I do rozporządzenia (UE) nr 1230/2012. Ponadto nie uwzględnia się odłączalnych nośników ładunku, nieodłączalnych urządzeń sprzęgających i wszelkich innych nieodłączalnych części zewnętrznych, które nie wpływają na przestrzeń użytkową dla pasażerów. Parametr ten dotyczy wyłącznie ciężkich autobusów; |
| (9) | »szerokość pojazdu« oznacza odnośny wymiar pojazdu zgodnie z tabelą II w dodatku 1 do załącznika I do rozporządzenia (UE) nr 1230/2012. Elementy odbiegające od tych przepisów, których się nie uwzględnia, to odłączalne nośniki ładunku, nieodłączalne urządzenia sprzęgające i wszelkie inne nieodłączalne części zewnętrzne, które nie wpływają na przestrzeń użytkową dla pasażerów; |
| (10) | »wysokość wejścia bez przyklęku« oznacza poziom podłogi nad podłożem w pierwszym otworze drzwi mierzony na najbardziej wysuniętych do przodu drzwiach pojazdu, gdy pojazd nie znajduje się w przyklęku; |
| (11) | »ogniwo paliwowe« oznacza przetwornik energii przekształcający energię chemiczną (pobieraną) w energię elektryczną (oddawaną) lub na odwrót; |
| (12) | »pojazd zasilany ogniwami paliwowymi« lub »FCV)« oznacza pojazd wyposażony w mechanizm napędowy obejmujący wyłącznie ogniwo (ogniwa) paliwowe oraz maszynę elektryczną (maszyny elektryczne) jako przetwornik (przetworniki) energii napędowej; |
| (13) | »pojazd hybrydowy zasilany ogniwami paliwowymi« lub »FCHV« oznacza pojazd zasilany ogniwami paliwowymi wyposażony w mechanizm napędowy obejmujący co najmniej jeden układ przechowywania paliwa oraz co najmniej jeden układ magazynowania energii elektrycznej wielokrotnego ładowania jako układy magazynowania energii napędowej; |
| (14) | »pojazd wyposażony wyłącznie w silniki spalinowe wewnętrznego spalania« oznacza pojazd, w którym wszystkie przetworniki energii napędowej to silniki spalinowe wewnętrznego spalania; |
| (15) | »maszyna elektryczna« lub »EM« oznacza przetwornik energii przekształcający energię elektryczną na mechaniczną i odwrotnie; |
| (16) | »układ magazynowania energii« oznacza układ, który magazynuje i uwalnia energię w tej samej formie, w jakiej została pobrana; |
| (17) | »układ magazynowania energii napędowej« oznacza układ magazynowania energii mechanizmu napędowego, który nie jest urządzeniem peryferyjnym, którego energia oddawana jest wykorzystywana bezpośrednio lub pośrednio na potrzeby napędzania pojazdu; |
| (18) | »kategoria układu magazynowania energii napędowej« oznacza układ przechowywania paliwa, układ magazynowania energii elektrycznej wielokrotnego ładowania (REESS) lub układ magazynowania energii mechanicznej wielokrotnego ładowania; |
| (19) | »za« oznacza położenie w mechanizmie napędowym pojazdu bliżej kół niż rzeczywiste położenie referencyjne; |
| (20) | »układ napędowy« oznacza połączone elementy mechanizmu napędowego służące do przenoszenia energii mechanicznej pomiędzy przetwornikiem (przetwornikami) energii napędowej a kołami; |
| (21) | »przetwornik energii« oznacza układ, w którym forma energii oddawanej różni się od formy energii pobieranej; |
| (22) | »przetwornik energii napędowej« oznacza przetwornik energii mechanizmu napędowego, który nie jest urządzeniem peryferyjnym, którego energia oddawana jest wykorzystywana bezpośrednio lub pośrednio na potrzeby napędzania pojazdu; |
| (23) | »kategoria przetwornika energii napędowej« oznacza silnik spalinowy wewnętrznego spalania, maszynę elektryczną lub ogniwo paliwowe; |
| (24) | »forma energii« oznacza energię elektryczną, energię mechaniczną lub energię chemiczną (w tym paliwa); |
| (25) | »układ przechowywania paliwa« oznacza układ magazynowania energii napędowej, który magazynuje energię chemiczną w postaci paliwa ciekłego lub gazowego; |
| (26) | »pojazd hybrydowy« lub »HV« oznacza pojazd wyposażony w mechanizm napędowy obejmujący co najmniej dwie różne kategorie przetworników energii napędowej oraz co najmniej dwie różne kategorie układów magazynowania energii napędowej; |
| (27) | »hybrydowy pojazd elektryczny« lub »HEV« oznacza pojazd hybrydowy, w którym jeden z przetworników energii napędowej jest maszyną elektryczną, a drugi jest silnikiem spalinowym wewnętrznego spalania; |
| (28) | »pojazd elektryczny z napędem szeregowym« oznacza hybrydowy pojazd elektryczny o strukturze mechanizmu napędowego, w której silnik spalinowy zasila co najmniej jedną ścieżkę przemiany energii elektrycznej bez mechanicznego połączenia między silnikiem spalinowym a kołami pojazdu; |
| (29) | »silnik spalinowy wewnętrznego spalania« lub »ICE« oznacza przetwornik energii z przerywanym lub ciągłym utlenianiem paliwa, przekształcający energię chemiczną na mechaniczną; |
| (30) | »hybrydowy pojazd elektryczny doładowywany zewnętrznie« lub »OVC-HEV« oznacza hybrydowy pojazd elektryczny, który może być doładowywany ze źródła zewnętrznego; |
| (31) | »pojazd elektryczny z napędem równoległym« oznacza hybrydowy pojazd elektryczny o strukturze mechanizmu napędowego, w której silnik spalinowy zasila wyłącznie jedną mechanicznie połączoną ścieżkę między silnikiem a kołami pojazdu; |
| (32) | »urządzenia peryferyjne« oznaczają wszelkie urządzenia pobierające, przekształcające, magazynujące lub dostarczające energię, w przypadku których energia nie jest wykorzystywana bezpośrednio ani pośrednio do celów napędzania pojazdu, ale które mają zasadnicze znaczenie dla pracy mechanizmu napędowego; |
| (33) | »mechanizm napędowy« oznacza łączną kombinację w pojeździe układu (układów) magazynowania energii napędowej, przetwornika (przetworników) energii napędowej oraz układu napędowego (układów napędowych), zapewniających energię mechaniczną na kołach w celu napędzania pojazdu, wraz z urządzeniami peryferyjnymi; |
| (34) | »pojazd wyłącznie elektryczny« lub »PEV« oznacza pojazd silnikowy zgodnie z art. 3 pkt 16 rozporządzenia (UE) 2018/858, wyposażony w mechanizm napędowy obejmujący wyłącznie maszyny elektryczne jako przetworniki energii napędowej oraz wyłącznie układy magazynowania energii elektrycznej wielokrotnego ładowania jako układy magazynowania energii napędowej lub alternatywnie wszelkie inne środki do bezpośredniego przewodzenia lub indukcyjnego dostarczania energii elektrycznej z sieci energetycznej dostarczającej energię napędową do pojazdu silnikowego; |
| (35) | »przed« oznacza położenie w mechanizmie napędowym pojazdu dalej od kół niż rzeczywiste położenie referencyjne; |
| (36) | »IEPC« oznacza zintegrowany elektryczny mechanizm napędowy zgodnie z pkt 2 ppkt 36 załącznika Xb; |
| (37) | »IHPC Type 1« oznacza część zintegrowaną mechanizmu napędowego w hybrydowych pojazdach elektrycznych typu 1 zgodnie z pkt 2 ppkt 38 załącznika Xb. |
3. Zbiór parametrów wejściowych
W tabelach 1-11 określono zbiory parametrów wejściowych, które podaje się w odniesieniu do właściwości pojazdu. poszczególne zbiory są zdefiniowane w zależności od przypadku zastosowania (średnie samochody ciężarowe, ciężkie samochody ciężarowe i ciężkie autobusy).
W przypadku ciężkich autobusów dokonuje się rozróżnienia między parametrami wejściowymi, które podaje się na potrzeby do symulacji w pojeździe podstawowym oraz na potrzeby symulacji w pojeździe kompletnym lub pojeździe skompletowanym. Stosuje się następujące przepisy:
| - | Producenci pojazdów podstawowych podają wszystkie parametry wymienione w kolumnie pojazdu podstawowego. |
| - | Producenci pojazdów podstawowych mogą ponadto podać dodatkowe parametry wejściowe związane z pojazdem kompletnym lub skompletowanym, które można określić już na tym początkowym etapie. W takim przypadku podaje się informacje o producencie (P235), adresie producenta (P252), numerze identyfikacyjnym pojazdu (P238) i dacie (P239) zarówno dla zbioru podstawowych parametrów wejściowych, jak i zbioru dodatkowych parametrów wejściowych. |
| - | Producenci pojazdu pośredniego podają parametry wejściowe dotyczące pojazdu kompletnego lub skompletowanego, które można określić na tym etapie i za które odpowiadają. Jeżeli parametr, który został już podany na poprzednim etapie produkcji, zostanie zaktualizowany, konieczne jest określenie całego statusu parametru (przykład: jeśli do pojazdu zostanie dodana druga pompa ciepła, podaje się technologię obu układów). We wszystkich przypadkach producenci pojazdu pośredniego podają informacje o producencie (P235), adresie producenta (P252), numerze identyfikacyjnym pojazdu (P238) i dacie (P239). |
| - | Producenci pojazdu skompletowanego podają parametry wejściowe, które można określić na tym etapie i za które odpowiadają. W przypadku konieczności aktualizacji parametrów już podanych na poprzednich etapach produkcji stosuje się te same przepisy, co w przypadku producentów pojazdu pośredniego. We wszystkich przypadkach podaje się informacje o producencie (P235), adresie producenta (P252), numerze identyfikacyjnym pojazdu (P238), dacie (P239) i skorygowanej rzeczywistej masie (P038). Aby umożliwić przeprowadzenie niezbędnych symulacji, skonsolidowany zbiór danych ze wszystkich etapów produkcji musi zawierać wszystkie informacje wymienione w kolumnie dotyczącej pojazdu kompletnego lub pojazdu skompletowanego. |
| - | Producenci odpowiedzialni za etap produkcji pojazdu kompletnego podają wszystkie parametry wejściowe. Informacje o producencie (P235), adresie producenta (P252), numerze identyfikacyjnym pojazdu (P238) i dacie (P239) podaje się zarówno w odniesieniu do podstawowych parametrów wejściowych, jak i parametrów wejściowych pojazdu kompletnego. |
| - | Parametr »VehicleDeclarationType« (P293) jest podawany na wszystkich etapach produkcji, w ramach których przekazuje się którykolwiek z parametrów wymienionych dla kompletnego lub skompletowanego pojazdu. |
Tabela 1
Parametry wejściowe »Vehicle/General«
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/Odniesienie | Ciężkie samochody ciężarowe | Średnie samochody ciężarowe | Ciężkie autobusy (pojazd podstawowy) | Ciężkie autobusy (pojazdy kompletne lub skompletowane) |
| Manufacturer | P235 | Token | [-] |
| X | X | X | X |
| Manufacturer Address | P252 | Token | [-] |
| X | X | X | X |
| Model_CommercialName | P236 | Token | [-] |
| X | X | X | X |
| VIN | P238 | Token | [-] |
| X | X | X | X |
| Date | P239 | Date Time | [-] | Data i godzina utworzenia informacji i danych wejściowych | X | X | X | X |
| Legislative Category | P251 | String | [-] | Dopuszczalne wartości: N2«, »N3«, »M3« | X | X | X | X |
| ChassisConfiguration | P036 | String | [-] | Dopuszczalne wartości: »Rigid Lorry«, »Tractor«, »Van«, »Bus« | X | X | X |
|
| AxleConfiguration | P037 | String | [-] | Dopuszczalne wartości: »4 × 2«, »4 × 2F«, »6 × 2«, »6 × 4«, »8 × 2«, »8 × 4« gdzie »4 × 2F« odnosi się do pojazdów 4 × 2 z napędzaną przednią osią | X | X | X |
|
| Articulated | P281 | boolean |
| Zgodnie z art. 3 pkt 37 |
|
| X |
|
| CorrectedActualMass | P038 | Int | [kg] | Zgodnie ze »skorygowaną rzeczywistą masą pojazdu« określoną w pkt 2 ppkt 4 | X | X |
| X |
| TechnicalPermissibleMaximum LadenMass | P041 | int | [kg] | Zgodnie z art. 2 pkt 7 rozporządzenia (UE) nr 1230/2012 | X | X | X | X |
| IdlingSpeed | P198 | int | [1/min] | Zgodnie z pkt 7.1 W przypadku pojazdu wyłącznie elektrycznego wprowadzenie danych wejściowych nie jest wymagane. | X | X | X |
|
| RetarderType | P052 | string | [-] | Dopuszczalne wartości: »None«, »Losses included in Gearbox«, »Engine Retarder«, »Transmission Input Retarder«, »Transmission Output Retarder«, »Axlegear Input Retarder« »Axlegear Input Retarder« dotyczy wyłącznie struktur mechanizmu napędowego »E3«, »S3«, »S-IEPC« i »E-IEPC« | X | X | X |
|
| RetarderRatio | P053 | double, 3 | [-] | Wskaźnik przyspieszenia zgodnie z tabelą 2 w załączniku VI | X | X | X |
|
| AngledriveType | P180 | string | [-] | Dopuszczalne wartości: »None«, »Losses included in Gearbox«, »Separate Angledrive« | X | X | X |
|
| PTOShafts GearWheels (1) | P247 | string | [-] | Dopuszczalne wartości: »none«, »only the drive shaft of the PTO«, »drive shaft and/or up to 2 gear wheels«, »drive shaft and/or more than 2 gear wheels«, »only one engaged gearwheel above oil level«, »PTO which includes 1 or more additional gearmesh(es), without disconnect clutch« | X |
|
|
|
| PTOOther Elements (1) | P248 | string | [-] | Dopuszczalne wartości: »none«, »shift claw, synchroniser, sliding gearwheel«, »multi-disc clutch«, »multi-disc clutch, oil pump« | X |
|
|
|
| CertificationNumberEngine | P261 | token | [-] | Ma zastosowanie tylko w przypadku, gdy dana część znajduje się w pojeździe | X | X | X |
|
| CertificationNumberGearbox | P262 | token | [-] | Ma zastosowanie tylko w przypadku, gdy dana część znajduje się w pojeździe oraz podano certyfikowane dane wejściowe | X | X | X |
|
| CertificationNumberTorqueconverter | P263 | token | [-] | Ma zastosowanie tylko w przypadku, gdy dana część znajduje się w pojeździe oraz podano certyfikowane dane wejściowe | X | X | X |
|
| CertificationNumberAxlegear | P264 | token | [-] | Ma zastosowanie tylko w przypadku, gdy dana część znajduje się w pojeździe oraz podano certyfikowane dane wejściowe | X | X | X |
|
| CertificationNumberAngledrive | P265 | token | [-] | Odnosi się do certyfikowanej dodatkowej części układu przeniesienia napędu zainstalowanej w położeniu napędu kątowego. Ma zastosowanie tylko w przypadku, gdy dana część znajduje się w pojeździe oraz podano certyfikowane dane wejściowe | X | X | X |
|
| CertificationNumberRetarder | P266 | token | [-] | Ma zastosowanie tylko w przypadku, gdy dana część znajduje się w pojeździe oraz podano certyfikowane dane wejściowe | X | X | X |
|
| Certification NumberAirdrag | P268 | token | [-] | Ma zastosowanie tylko w przypadku, gdy podano certyfikowane dane wejściowe | X | X |
| X |
| AirdragModifiedMultistage | P334 | boolean | [-] | Dane wejściowe wymagane na wszystkich etapach produkcji po pierwszym wprowadzeniu w odniesieniu do części podobnej w zakresie oporu powietrza. Jeżeli parametr ustawiono na wartość »true« bez podawania certyfikowanej części podobnej w zakresie oporu powietrza, narzędzie symulacyjne stosuje wartości standardowe zgodnie z załącznikiem VIII. |
|
|
| X |
| Certification NumberIEPC | P351 | token | [-] | Ma zastosowanie tylko w przypadku, gdy dana część znajduje się w pojeździe oraz podano certyfikowane dane wejściowe | X | X | X |
|
| ZeroEmissionVehicle | P269 | boolean | [-] | W rozumieniu art. 3 pkt 15 | X | X | X |
|
| VocationalVehicle | P270 | boolean | [-] | Zgodnie z art. 3 pkt 9 rozporządzenia (UE) 2019/1242 | X |
|
|
|
| NgTankSystem | P275 | string | [-] | Dopuszczalne wartości: »Compressed«, »Liquefied« Dotyczy wyłącznie pojazdów o silnikach wykorzystujących rodzaj paliwa »NG PI« i »NG CI« (P193) Jeżeli w pojeździe znajdują się oba układy zbiorników, jako parametr wejściowy do narzędzia symulacyjnego podaje się układ, który jest w stanie pomieścić większą ilość energii paliwa. | X | X |
| X |
| Sleepercab | P276 | boolean | [-] |
| X |
|
|
|
| ClassBus | P282 | string | [-] | Dopuszczalne wartości: »I«, »I+II«, »A«, »II«, »II+III«, »III«, »B« zgodnie z pkt 2 regulaminu ONZ nr 107. |
|
|
| X |
| NumberPassengersSeatsLowerDeck | P283 | int | [-] | Liczba siedzeń dla pasażerów - z wyłączeniem siedzeń dla kierowcy i załogi. W przypadku pojazdu dwupokładowego parametr ten służy do zadeklarowania liczby siedzeń dla pasażerów na dolnym pokładzie. W przypadku pojazdu jednopokładowego parametr ten służy do zadeklarowania całkowitej liczby siedzeń dla pasażerów. |
|
|
| X |
| NumberPassengersStandingLowerDeck | P354 | int | [-] | Liczba zarejestrowanych pasażerów stojących W przypadku pojazdu dwupokładowego parametr ten służy do zadeklarowania liczby zarejestrowanych pasażerów stojących na dolnym pokładzie. W przypadku pojazdu jednopokładowego parametr ten służy do zadeklarowania całkowitej liczby zarejestrowanych pasażerów stojących. |
|
|
| X |
| NumberPassengersSeatsUpperDeck | P284 | int | [-] | Liczba siedzeń dla pasażerów - z wyłączeniem siedzeń dla kierowcy i załogi na górnym pokładzie w pojeździe dwupokładowym. W przypadku pojazdów jednopokładowych jako parametr wejściowy podaje się wartość »0«. |
|
|
| X |
| NumberPassengersStandingUpperDeck | P355 | int | [-] | Liczba zarejestrowanych pasażerów stojących na górnym pokładzie w pojeździe dwupokładowym. W przypadku pojazdów jednopokładowych jako parametr wejściowy podaje się wartość »0«. |
|
|
| X |
| BodyworkCode | P285 | int | [-] | Dopuszczalne wartości: »CA«, »CB«, »CC«, »CD«, »CE«, »CF«, »CG«, »CH«, »CI«, »CJ« zgodnie z częścią C pkt 3 załącznika I do rozporządzenia (UE) 2018/585. W przypadku podwozia autobusu o kodzie pojazdu CX nie podaje się żadnych danych wejściowych. |
|
|
| X |
| LowEntry | P286 | boolean | [-] | »obniżone wejście« zgodnie z pkt 1.2.2.3 załącznika I |
|
|
| X |
| HeightIntegratedBody | P287 | int | [mm] | zgodnie z pkt 2 ppkt 5 |
|
|
| X |
| VehicleLength | P288 | int | [mm] | zgodnie z pkt 2 ppkt 8 |
|
|
| X |
| VehicleWidth | P289 | int | [mm] | zgodnie z pkt 2 ppkt 9 |
|
|
| X |
| EntranceHeight | P290 | int | [mm] | zgodnie z pkt 2 ppkt 10 |
|
|
| X |
| DoorDriveTechnology | P291 | string | [-] | Dopuszczalne wartości: »pneumatic«, »electric«, »mixed« |
|
|
| X |
| Cargo volume | P292 | double, 3 | [m3] | Dotyczy wyłącznie pojazdów o konfiguracji podwozia »van« |
| X |
|
|
| VehicleDeclarationType | P293 | string | [-] | Dopuszczalne wartości: »interim«, »final« |
|
|
| X |
| VehicleTypeApprovalNumber | P352 | token | [-] | Numer homologacji typu całego pojazdu W przypadku indywidualnego dopuszczenia pojazdu, numer indywidualnego dopuszczenia pojazdu | X | X |
| X |
Tabela 2
Parametry wejściowe »Vehicle/AxleConfiguration« dotyczące poszczególnych osi kół
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/Odniesienie | Ciężkie samochody ciężarowe | Średnie samochody ciężarowe | Ciężkie autobusy (pojazd podstawowy) | Ciężkie autobusy (pojazd kompletny lub skompletowany) |
| Twin Tyres | P045 | boolean | [-] |
| X | X | X |
|
| Axle Type | P154 | string | [-] | Dopuszczalne wartości: »VehicleNonDriven«, »VehicleDriven« | X | X | X |
|
| Steered | P195 | boolean |
| Wyłącznie aktywne osie kierowane deklaruje się jako »kierowane« | X | X | X |
|
| Certification NumberTyre | P267 | token | [-] |
| X | X | X |
|
Tabele 3 i 3a zawierają wykazy parametrów wejściowych dotyczących urządzeń pomocniczych. Definicje techniczne służące do określania tych parametrów podano w załączniku IX. Numer identyfikacyjny parametru służy do zapewnienia wyraźnego odniesienia między parametrami z załączników III i IX.
Tabela 3
Parametry wejściowe »Vehicle/Auxiliaries« dla średnich i ciężkich samochodów ciężarowych
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/Odniesienie |
| EngineCoolingFan/Technology | P181 | string | [-] | Dopuszczalne wartości: »Crankshaft mounted - Electronically controlled visco clutch«, »Crankshaft mounted - Bimetallic controlled visco clutch«, »Crankshaft mounted - Discrete step clutch«, »Crankshaft mounted - On/off clutch«, »Belt driven or driven via transmission - Electronically controlled visco clutch«, »Belt driven or driven via transmission - Bimetallic controlled visco clutch«, »Belt driven or driven via transmission - Discrete step clutch«, »Belt driven or driven via transmission - On/off clutch«, »Hydraulic driven - Variable displacement pump«, »Hydraulic driven - Constant displacement pump«, »Electrically driven - Electronically controlled« |
| SteeringPump/Technology | P182 | string | [-] | Dopuszczalne wartości: »Fixed displacement«, »Fixed displacement with elec. control«, »Dual displacement«, »Dual displacement with elec. control«, »Variable displacement mech. controlled«, »Variable displacement elec. controlled«, »Electric driven pump«, »Full electric steering gear« W przypadku pojazdu wyłącznie elektrycznego lub hybrydowego pojazdu elektrycznego z konfiguracją mechanizmu napędowego »S« lub »S-IEPC« zgodnie z pkt 10.1.1 »Electric driven pump« lub »Full electric steering gear« są jedynymi dopuszczalnymi wartościami. Wymagany odrębny wpis w przypadku każdej aktywnej sterowanej osi koła. |
| ElectricSystem/Technology | P183 | string | [-] | Dopuszczalne wartości: »Standard technology«, »Standard technology - LED headlights, all«; |
| PneumaticSystem/Technology | P184 | string | [-] | Dopuszczalne wartości: »Small«, »Small + ESS«, »Small + visco clutch«, »Small + mech. clutch«, »Small + ESS + AMS«, »Small + visco clutch + AMS«, »Small + mech. clutch + AMS«, »Medium Supply 1-stage«, »Medium Supply 1-stage + ESS«, »Medium Supply 1-stage + visco clutch«, »Medium Supply 1-stage + mech. clutch«, »Medium Supply 1-stage + ESS + AMS«, »Medium Supply 1-stage + visco clutch + AMS«, »Medium Supply 1-stage + mech. clutch + AMS«, »Medium Supply 2-stage«, »Medium Supply 2-stage + ESS«, »Medium Supply 2-stage + visco clutch«, »Medium Supply 2-stage + mech. clutch«, »Medium Supply 2-stage + ESS + AMS«, »Medium Supply 2-stage + visco clutch + AMS«, »Medium Supply 2-stage + mech. clutch + AMS«, »Large Supply«, »Large Supply + ESS«, »Large Supply + visco clutch«, »Large Supply + mech. clutch«, »Large Supply + ESS + AMS«, »Large Supply + visco clutch + AMS«, »Large Supply + mech. clutch + AMS«; »Vacuum pump«, »Small + elec. driven«, »Small + ESS + elec. driven«, »Medium Supply 1-stage + elec. driven«, »Medium Supply 1-stage + AMS + elec. driven«, »Medium Supply 2-stage + elec. driven«, »Medium Supply 2-stage + AMS + elec. driven«, »Large Supply + elec. driven«, »Large Supply + AMS + elec. driven«, »Vacuum pump + elec. driven«; W przypadku pojazdu wyłącznie elektrycznego dopuszczalnymi wartościami są tylko technologie »elec. driven«. |
| HVAC/Technology | P185 | string | [-] | Dopuszczalne wartości: »None«, »Default« |
Tabela 3a
Parametry wejściowe »Vehicle/Auxiliaries« dla ciężkich autobusów
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/Odniesienie | Ciężkie autobusy (pojazd podstawowy) | Ciężkie autobusy (pojazd kompletny lub skompletowany) |
| EngineCoolingFan/Technology | P181 | string | [-] | Dopuszczalne wartości: »Crankshaft mounted - Electronically controlled visco clutch«, »Crankshaft mounted - Bimetallic controlled visco clutch«, »Crankshaft mounted - Discrete step clutch 2 stages«, »Crankshaft mounted - Discrete step clutch 3 stages«, »Crankshaft mounted - On/off clutch«, »Belt driven or driven via transmission - Electronically controlled visco clutch«, »Belt driven or driven via transmission - Bimetallic controlled visco clutch«, »Belt driven or driven via transmission - Discrete step clutch 2 stages«, »Belt driven or driven via transmission - Discrete step clutch 3 stages«, »Belt driven or driven via transmission - On/off clutch«, »Hydraulic driven - Variable displacement pump«, »Hydraulic driven - Constant displacement pump«, »Electrically driven - Electronically controlled« | X |
|
| SteeringPump/Technology | P182 | string | [-] | Dopuszczalne wartości: »Fixed displacement«, »Fixed displacement with elec. control«, »Dual displacement«, »Dual displacement with elec. control«, »Variable displacement mech. controlled«, »Variable displacement elec. controlled«, »Electric driven pump«, »Full electric steering gear« W przypadku pojazdu wyłącznie elektrycznego lub hybrydowego pojazdu elektrycznego z konfiguracją mechanizmu napędowego »S« lub »S-IEPC« zgodnie z pkt 10.1.1 dopuszczalnymi wartościami są tylko »Electric driven pump« lub »Full electric steering gear« Wymagany odrębny wpis w przypadku każdej aktywnej sterowanej osi koła. | X |
|
| ElectricSystem/AlternatorTechnology | P294 | string | [-] | Dopuszczalne wartości: »conventional«, »smart«, »no alternator« Pojedynczy wpis dla każdego pojazdu W przypadku pojazdów wyposażonych wyłącznie w silniki spalinowe dopuszczalnymi wartościami są tylko »conventional« lub »smart«. W przypadku hybrydowego pojazdu elektrycznego z konfiguracją mechanizmu napędowego »S« lub »S-IEPC« zgodnie z pkt 10.1.1 dopuszczalnymi wartościami są tylko »no alternator« lub »conventional« | X |
|
| ElectricSystem/SmartAlternatorRatedCurrent | P295 | integer | [A] | Odrębny wpis dla poszczególnych inteligentnych alternatorów | X |
|
| ElectricSystem/SmartAlternatorRatedVoltage | P296 | integer | [V] | Dopuszczalne wartości: »12«, »24«, »48« Odrębny wpis dla poszczególnych inteligentnych alternatorów | X |
|
| ElectricSystem/SmartAlternatorBatteryTechnology | P297 | string | [-] | Dopuszczalne wartości: »lead-acid battery - conventional«, »lead-acid battery -AGM«, »lead-acid battery - gel«, »li-ion battery - high power«, »li-ion battery - high energy« Odrębny wpis dla poszczególnych akumulatorów ładowanych przez układ z inteligentnym alternatorem | X |
|
| ElectricSystem/SmartAlternatorBatteryNominalVoltage | P298 | integer | [V] | Dopuszczalne wartości: »12«, »24«, »48« W przypadku akumulatorów skonfigurowanych szeregowo (np. dwie jednostki 12 V w układzie 24 V) należy podać rzeczywiste napięcie znamionowe poszczególnych akumulatorów (w tym przykładzie 12 V). Odrębny wpis dla poszczególnych akumulatorów ładowanych przez układ z inteligentnym alternatorem | X |
|
| ElectricSystem/SmartAlternatorBatteryRatedCapacity | P299 | integer | [Ah] | Odrębny wpis dla poszczególnych akumulatorów ładowanych przez układ z inteligentnym alternatorem | X |
|
| ElectricSystem/SmartAlternatorCapacitorTechnology | P300 | string | [-] | Dopuszczalne wartości: »with DCDC converter« Odrębny wpis dla poszczególnych kondensatorów ładowanych przez układ z inteligentnym alternatorem | X |
|
| ElectricSystem/SmartAlternatorCapacitorRatedCapacitance | P301 | integer | [F] | Odrębny wpis dla poszczególnych kondensatorów ładowanych przez układ z inteligentnym alternatorem | X |
|
| ElectricSystem/SmartAlternatorCapacitorRatedVoltage | P302 | integer | [V] | Odrębny wpis dla poszczególnych kondensatorów ładowanych przez układ z inteligentnym alternatorem | X |
|
| ElectricSystem/SupplyFromHEVPossible | P303 | boolean | [-] |
| X |
|
| ElectricSystem/InteriorlightsLED | P304 | boolean | [-] |
|
| X |
| ElectricSystem/DayrunninglightsLED | P305 | boolean | [-] |
|
| X |
| ElectricSystem/PositionlightsLED | P306 | boolean | [-] |
|
| X |
| ElectricSystem/BrakelightsLED | P307 | boolean | [-] |
|
| X |
| ElectricSystem/HeadlightsLED | P308 | boolean | [-] |
|
| X |
| PneumaticSystem/SizeOfAirSupply | P309 | string | [-] | Dopuszczalne wartości: »Small«, »Medium Supply 1-stage«, »Medium Supply 2-stage«, »Large Supply 1-stage«, »Large Supply 2-stage«, »not applicable« W przypadku elektrycznego napędu sprężarki należy podać »not applicable«. W przypadku pojazdu wyłącznie elektrycznego wprowadzenie danych wejściowych nie jest wymagane. | X |
|
| PneumaticSystem/CompressorDrive | P310 | string | [-] | Dopuszczalne wartości: »mechanically«, »electrically« W przypadku pojazdu wyłącznie elektrycznego jedynie »electrically« jest dopuszczalną wartością. | X |
|
| PneumaticSystem/Clutch | P311 | string | [-] | Dopuszczalne wartości: »none«, »visco«, »mechanically« W przypadku pojazdu wyłącznie elektrycznego wprowadzenie danych wejściowych nie jest wymagane. | X |
|
| PneumaticSystem/SmartRegenerationSystem | P312 | boolean | [-] |
| X |
|
| PneumaticSystem/SmartCompressionSystem | P313 | boolean | [-] | W przypadku pojazdu wyłącznie elektrycznego lub hybrydowego pojazdu elektrycznego z konfiguracją mechanizmu napędowego »S« lub »S-IEPC« zgodnie z pkt 10.1.1 wprowadzenie danych wejściowych nie jest wymagane. | X |
|
| PneumaticSystem/Ratio Compressor ToEngine | P314 | double, 3 | [-] | W przypadku elektrycznego napędu sprężarki należy podać »0,000«. W przypadku pojazdu wyłącznie elektrycznego wprowadzenie danych wejściowych nie jest wymagane. | X |
|
| PneumaticSystem/Air suspension control | P315 | string | [-] | Dopuszczalne wartości: »mechanically«, »electronically« | X |
|
| PneumaticSystem/SCRReagentDosing | P316 | boolean | [-] |
| X |
|
| HVAC/SystemConfiguration | P317 | int | [-] | Dopuszczalne wartości: »0«-»10« W przypadku niekompletnego systemu HVAC należy podać »0«. »0« nie ma zastosowania do pojazdów kompletnych lub skompletowanych. |
| X |
| HVAC/ HeatPumpTypeDriverCompartmentCooling | P318 | string | [-] | Dopuszczalne wartości: »none«, »not applicable«, »R-744«, »non R-744 2-stage«, »non R-744 3-stage«, »non R-744 4-stage«, »non R-744 continuous« w odniesieniu do konfiguracji układu HVAC 6 i 10 deklaruje się »not applicable« ze względu na zasilanie z pompy ciepła pasażera |
| X |
| HVAC/ HeatPumpTypeDriverCompartmentHeating | P319 | string | [-] | Dopuszczalne wartości: »none«, »not applicable«, »R-744«, »non R-744 2-stage«, »non R-744 3-stage«, »non R-744 4-stage«, »non R-744 continuous« w odniesieniu do konfiguracji układu HVAC 6 i 10 deklaruje się »not applicable« ze względu na zasilanie z pompy ciepła pasażera |
| X |
| HVAC/ HeatPumpTypePassengerCompartmentCooling | P320 | string | [-] | Dopuszczalne wartości: »none«, »R-744«, »non R-744 2-stage«, »non R-744 3-stage«, »non R-744 4-stage«, »non R-744 continuous« W przypadku wielu pomp ciepła z różnymi technologiami chłodzenia przedziału pasażerskiego należy zadeklarować przeważającą technologię (np. zgodnie z dostępną mocą lub preferowanym użytkowaniem podczas pracy). |
| X |
| HVAC/ HeatPumpTypePassengerCompartmentHeating | P321 | string | [-] | Dopuszczalne wartości: »none«, »R-744«, »non R-744 2-stage«, »non R-744 3-stage«, »non R-744 4-stage«, »non R-744 continuous« W przypadku wielu pomp ciepła z różnymi technologiami ogrzewania przedziału pasażerskiego należy zadeklarować przeważającą technologię (np. zgodnie z dostępną mocą lub preferowanym użytkowaniem podczas pracy). |
| X |
| HVAC/AuxiliaryHeaterPower | P322 | integer | [W] | Należy podać wartość »0«, jeśli nie zainstalowano żadnego pomocniczego urządzenia grzewczego |
| X |
| HVAC/Double glazing | P323 | boolean | [-] |
|
| X |
| HVAC/AdjustableCoolantThermostat | P324 | boolean | [-] |
| X |
|
| HVAC/AdjustableAuxiliaryHeater | P325 | boolean | [-] |
|
| X |
| HVAC/EngineWasteGasHeatExchanger | P326 | boolean | [-] | W przypadku pojazdu wyłącznie elektrycznego wprowadzenie danych wejściowych nie jest wymagane. | X |
|
| HVAC/SeparateAirDistributionDucts | P327 | boolean | [-] |
|
| X |
| HVAC/WaterElectricHeater | P328 | boolean | [-] | Dane wejściowe podaje się tylko w przypadku hybrydowych pojazdów elektrycznych i pojazdów wyłącznie elektrycznych |
| X |
| HVAC/AirElectricHeater | P329 | boolean | [-] | Dane wejściowe podaje się tylko w przypadku hybrydowych pojazdów elektrycznych i pojazdów wyłącznie elektrycznych |
| X |
| HVAC/OtherHeating Technology | P330 | boolean | [-] | Dane wejściowe podaje się tylko w przypadku hybrydowych pojazdów elektrycznych i pojazdów wyłącznie elektrycznych |
| X |
Tabela 4
Parametry wejściowe »Vehicle/EngineTorqueLimits« dla poszczególnych biegów (fakultatywnie)
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/Odniesienie | Ciężkie samochody ciężarowe | Średnie samochody ciężarowe | Ciężkie autobusy (pojazd podstawowy) | Ciężkie autobusy (pojazd kompletny lub skompletowany) |
| gear | P196 | integer | [-] | liczbę biegów należy określić w przypadku, gdy zastosowanie mają związane z pojazdem ograniczenia momentu obrotowego silnika ustalone zgodnie z pkt 6 | X | X | X |
|
| MaxTorque | P197 | integer | [Nm] |
| X | X | X |
|
Tabela 5
Parametry wejściowe dla pojazdów wyłączonych zgodnie z art. 9
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/Odniesienie | Ciężkie samochody ciężarowe | Średnie samochody ciężarowe | Ciężkie autobusy (pojazd podstawowy) | Ciężkie autobusy (pojazd kompletny i skompletowany) |
| Manufacturer | P235 | token | [-] |
| X | X | X | X |
| ManufacturerAddress | P252 | token | [-] |
| X | X | X | X |
| Model_CommercialName | P236 | token | [-] |
| X | X | X | X |
| VIN | P238 | token | [-] |
| X | X | X | X |
| Date | P239 | dateTime | [-] | Data i godzina utworzenia informacji i danych wejściowych | X | X | X | X |
| LegislativeCategory | P251 | string | [-] | Dopuszczalne wartości: »N2«, »N3«, »M3« | X | X | X | X |
| ChassisConfiguration | P036 | string | [-] | Dopuszczalne wartości: »Rigid Lorry«, »Tractor«, »Van«, »Bus« | X | X | X |
|
| AxleConfiguration | P037 | string | [-] | Dopuszczalne wartości: »4 × 2«, »4 × 2F«, »6 × 2«, »6 × 4«, »8 × 2«, »8 × 4« gdzie »4 × 2F« odnosi się do pojazdów 4 × 2 z napędzaną przednią osią | X | X | X |
|
| Articulated | P281 | boolean |
| zgodnie z definicją określoną w załączniku I do niniejszego rozporządzenia. |
|
| X |
|
| CorrectedActualMass | P038 | int | [kg] | Zgodnie ze »skorygowaną rzeczywistą masą pojazdu« określoną w sekcji 2 pkt 4 | X | X |
| X |
| TechnicalPermissibleMaximumLadenMass | P041 | int | [kg] | Zgodnie z art. 2 pkt 7 rozporządzenia (UE) nr 1230/2012 | X | X | X | X |
| ZeroEmissionVehicle | P269 | boolean | [-] | W rozumieniu art. 3 pkt 15 | X | X | X |
|
| Sleepercab | P276 | boolean | [-] |
| X |
|
|
|
| ClassBus | P282 | string | [-] | Dopuszczalne wartości: »I«, »I+II«, »A«, »II«, »II+III«, »III«, »B« zgodnie z pkt 2 regulaminu ONZ nr 107. |
|
|
| X |
| NumberPassengersSeatsLowerDeck | P283 | int | [-] | Liczba siedzeń dla pasażerów - z wyłączeniem siedzeń dla kierowcy i załogi. W przypadku pojazdu dwupokładowego parametr ten służy do zadeklarowania liczby siedzeń dla pasażerów na dolnym pokładzie. W przypadku pojazdu jednopokładowego parametr ten służy do zadeklarowania całkowitej liczby siedzeń dla pasażerów. |
|
|
| X |
| NumberPassengersStandingLowerDeck | P354 | int | [-] | Liczba zarejestrowanych pasażerów stojących W przypadku pojazdu dwupokładowego parametr ten służy do zadeklarowania liczby zarejestrowanych pasażerów stojących na dolnym pokładzie. W przypadku pojazdu jednopokładowego parametr ten służy do zadeklarowania całkowitej liczby zarejestrowanych pasażerów stojących. |
|
|
| X |
| NumberPassengersSeatsUpperDeck | P284 | int | [-] | Liczba siedzeń dla pasażerów - z wyłączeniem siedzeń dla kierowcy i załogi na górnym pokładzie w pojeździe dwupokładowym. W przypadku pojazdów jednopokładowych jako parametr wejściowy podaje się wartość »0«. |
|
|
| X |
| NumberPassengersStandingUpperDeck | P355 | int | [-] | Liczba zarejestrowanych pasażerów stojących na górnym pokładzie w pojeździe dwupokładowym. W przypadku pojazdów jednopokładowych jako parametr wejściowy podaje się wartość »0«. |
|
|
| X |
| BodyworkCode | P285 | int | [-] | Dopuszczalne wartości: »CA«, »CB«, »CC«, »CD«, »CE«, »CF«, »CG«, »CH«, »CI«, »CJ« zgodnie z częścią C pkt 3 załącznika I do rozporządzenia (UE) 2018/585 |
|
|
| X |
| LowEntry | P286 | boolean | [-] | »obniżone wejście« zgodnie z pkt 1.2.2.3 załącznika I |
|
|
| X |
| HeightIntegratedBody | P287 | int | [mm] | zgodnie z pkt 2 ppkt 5 |
|
|
| X |
| SumNetPower | P331 | int | [W] | Maksymalna możliwa suma dodatniej mocy napędowej wszystkich przetworników energii, które są połączone z układem napędowym pojazdu lub z kołami | X | X | X |
|
| Technologia | P332 | string | [-] | Zgodnie z tabelą 1 w dodatku 1. Dopuszczalne wartości: »Dual-fuel vehicle Article 9 exempted«, »In-motion charging Article 9 exempted«, »Multiple powertrains Article 9 exempted«, »FCV Article 9 exempted«, »H2 ICE Article 9 exempted«, »HEV Article 9 exempted«, »PEV Article 9 exempted«, »HV Article 9 exempted« | X | X | X |
|
Tabela 6
Parametry wejściowe »Advanced driver assistance systems«
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/Odniesienie | Ciężkie samochody ciężarowe | Średnie samochody ciężarowe | Ciężkie autobusy (pojazd podstawowy) | Ciężkie autobusy (pojazd kompletny i skompletowany) |
| EngineStopStart | P271 | boolean | [-] | Zgodnie z pkt 8.1.1 Dane wejściowe podaje się jedynie w odniesieniu do pojazdów wyposażonych wyłącznie w silniki spalinowe i hybrydowych pojazdów elektrycznych. | X | X | X | X |
| EcoRollWithoutEngineStop | P272 | boolean | [-] | Zgodnie z pkt 8.1.2 Dane wejściowe podaje się jedynie w odniesieniu do pojazdów wyposażonych wyłącznie w silniki spalinowe. | X | X | X | X |
| EcoRollWithEngineStop | P273 | boolean | [-] | Zgodnie z pkt 8.1.3 Dane wejściowe podaje się jedynie w odniesieniu do pojazdów wyposażonych wyłącznie w silniki spalinowe. | X | X | X | X |
| PredictiveCruiseControl | P274 | string | [-] | Zgodnie z pkt 8.1.4, dopuszczalne wartości: »1,2«, »1,2,3«; | X | X | X | X |
| APTEcoRollReleaseLockupClutch | P333 | boolean | [-] | Dotyczy wyłącznie przekładni APT-S i APT-P w połączeniu z dowolną funkcją systemu eco-roll. Ustawia się na wartość »true«, jeżeli funkcja (2) określona w pkt 8.1.2 jest dominującym trybem systemu eco-roll. Dane wejściowe podaje się jedynie w odniesieniu do pojazdów wyposażonych wyłącznie w silniki spalinowe. | X | X | X | X |
Tabela 7
Ogólne parametry wejściowe dla hybrydowych pojazdów elektrycznych i pojazdów wyłącznie elektrycznych
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/Odniesienie | Ciężkie samochody ciężarowe | Średnie samochody ciężarowe | Ciężkie autobusy (pojazd podstawowy) | Ciężkie autobusy (pojazd kompletny lub skompletowany) |
| ArchitectureID | P400 | string | [-] | Zgodnie z pkt 10.1.3 dopuszczalnymi danymi wejściowymi są następujące wartości: »E2«, »E3«, »E4«, »E-IEPC«, »P1«, »P2«, »P2.5«, »P3«, »P4«, »S2«, »S3«, »S4«, »S-IEPC« | X | X | X |
|
| OvcHev | P401 | boolean | [-] | Zgodnie z pkt 2 ppkt 31 | X | X | X |
|
| MaxChargingPower | P402 | integer | [W] | Jako informacje wejściowe narzędzia symulacyjnego deklaruje się maksymalną moc ładowania dopuszczalną dla pojazdu w przypadku ładowania zewnętrznego. Dotyczy wyłącznie przypadku, gdy parametr »OvcHev« jest ustawiony na wartość »true«. | X | X | X |
|
Tabela 8
Parametry wejściowe dla każdego położenia maszyny elektrycznej
(Ma zastosowanie tylko w przypadku, gdy dana część znajduje się w pojeździe)
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/Odniesienie | |||||||||
| PowertrainPosition | P403 | string | [-] | Położenie maszyny elektrycznej w mechanizmie napędowym pojazdu zgodnie z pkt 10.1.2 i 10.1.3. Dopuszczalne wartości: »1«, »2«, »2.5«, »3«, »4«, »GEN«. Dozwolone jest wyłącznie jedno położenie maszyny elektrycznej dla każdego mechanizmu napędowego, z wyjątkiem struktury »S«. Struktura »S« wymaga położenia maszyny elektrycznej »GEN« oraz dodatkowo jednego innego położenia oznaczonego numerem »2«, »3« lub »4«. Położenie »1« nie jest dozwolone w przypadku struktury »S« i »E«. Położenie »GEN« jest dozwolone wyłącznie w przypadku struktury »S«. | |||||||||
| Count | P404 | integer | [-] | Liczba identycznych maszyn elektrycznych w określonym położeniu maszyny elektrycznej. W przypadku gdy parametr »PowertrainPosition« ma wartość »4«, liczba ta wynosi wielokrotność 2 (np. 2, 4, 6). | |||||||||
| CertificationNumberEM | P405 | token | [-] |
| |||||||||
| CertificationNumberADC | P406 | token | [-] | Fakultatywne dane wejściowe w przypadku dodatkowego przełożenia jednostopniowego (ADC) między maszyną elektryczną a punktem połączenia z mechanizmem napędowym pojazdu zgodnie z pkt 10.1.2. Niedozwolone w przypadku, gdy parametr »IHPCType« jest ustawiony na »IHPC Type 1«. | |||||||||
| P2.5GearRatios | P407 | double, 3 | [-] | Ma zastosowanie tylko w przypadku, gdy parametr »PowertrainPosition« jest ustawiony na »P2.5«. Deklarowane w odniesieniu do każdego biegu przekładni do jazdy do przodu. Wartość zadeklarowana w odniesieniu do przełożenia określona przez »nGBX_in / nEM« w przypadku maszyny elektrycznej bez dodatkowej ADC albo »nGBX_in / nADC« w przypadku maszyny elektrycznej wyposażonej w dodatkową ADC.
|
Tabela 9
Ograniczenia momentu obrotowego dla każdego położenia maszyny elektrycznej (opcjonalnie)
Zgłoszenie oddzielnego zbioru danych dla każdego poziomu napięcia mierzonego w ramach »CertificationNumberEM«. Zgłoszenie niedozwolone w przypadku, gdy parametr »IHPCType« jest ustawiony na »IHPC Type 1«.
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/Odniesienie |
| OutputShaftSpeed | P408 | double, 2 | [1/min] | W przypadku prędkości obrotowej deklaruje się dokładnie takie same wpisy, jak w »CertificationNumberEM« dla numeru parametru »P468« w dodatku 15 do załącznika Xb. |
| MaxTorque | P409 | double, 2 | [Nm] | Maksymalny moment obrotowy maszyny elektrycznej (w odniesieniu do wału zdawczego) jako funkcja wartości prędkości obrotowej zadeklarowany pod numerem parametru »P469« w dodatku 15 do załącznika Xb. Każda zadeklarowana wartość maksymalnego momentu obrotowego musi wynosić mniej niż 0,9-krotność wartości początkowej przy odpowiedniej prędkości obrotowej albo musi dokładnie odpowiadać wartości początkowej przy odpowiedniej prędkości obrotowej. Wartości zadeklarowanego maksymalnego momentu obrotowego nie mogą być mniejsze od zera. Jeżeli parametr »Count« (P404) jest większy niż jeden, maksymalny moment obrotowy deklaruje się dla pojedynczej maszyny elektrycznej (tak jak w badaniu części maszyny elektrycznej w ramach »CertificationNumberEM«). |
| MinTorque | P410 | double, 2 | [Nm] | Minimalny moment obrotowy maszyny elektrycznej (w odniesieniu do wału zdawczego) jako funkcja wartość prędkości obrotowej zadeklarowany pod numerem parametru »P470« w dodatku 15 do załącznika Xb. Każda zadeklarowana wartość minimalnego momentu obrotowego musi wynosić więcej niż 0,9-krotność wartości początkowej przy odpowiedniej prędkości obrotowej albo musi dokładnie odpowiadać wartości początkowej przy odpowiedniej prędkości obrotowej. Zadeklarowane wartości minimalnego momentu obrotowego nie mogą być większe niż zero. Jeżeli parametr »Count« (P404) jest większy niż jeden, minimalny moment obrotowy deklaruje się dla pojedynczej maszyny elektrycznej (tak jak w badaniu części maszyny elektrycznej w ramach »CertificationNumberEM«). |
Tabela 10
Parametry wejściowe według REESS
(Ma zastosowanie tylko w przypadku, gdy dana część znajduje się w pojeździe)
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/Odniesienie |
| StringID | P411 | integer | [-] | Rozmieszczenie reprezentatywnych podukładów akumulatorów zgodnie z załącznikiem Xb na poziomie pojazdu deklaruje się w drodze przypisania każdego układu akumulatorów do określonej sekwencji znaków zdefiniowanej przez ten parametr. Wszystkie określone sekwencje znaków są połączone równolegle, a wszystkie podukłady akumulatorów znajdujące się w określonej równoległej sekwencji znaków są połączone szeregowo. Dopuszczalne wartości: »1«, »2«, »3«, ... |
| CertificationNumberREESS | P412 | token | [-] |
|
| SOCmin | P413 | integer | [%] | Fakultatywne dane wejściowe. Dotyczy wyłącznie przypadku układu magazynowania energii wielokrotnego ładowania typu »akumulator«. Parametr ma skutki w narzędziu symulacyjnym jedynie wówczas, gdy wartość wejściowa jest wyższa niż wartość ogólna udokumentowana w podręczniku użytkownika. |
| SOCmax | P414 | integer | [%] | Fakultatywne dane wejściowe Dotyczy wyłącznie przypadku układu magazynowania energii wielokrotnego ładowania typu »akumulator«. Parametr ma skutki w narzędziu symulacyjnym jedynie wówczas, gdy wartość wejściowa jest niższa niż wartość ogólna udokumentowana w podręczniku użytkownika. |
Tabela 11
Ograniczenia doładowania dotyczące hybrydowego pojazdu elektrycznego z napędem równoległym (opcjonalnie)
Dozwolone tylko w przypadku, gdy konfiguracja mechanizmu napędowego to »P« lub »IHPC Type 1« zgodnie z pkt 10.1.1.
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/Odniesienie |
| RotationalSpeed | P415 | double, 2 | [1/min] | W odniesieniu do prędkości przekładni na wale wejściowym |
| BoostingTorque | P416 | double, 2 | [Nm] | Zgodnie z pkt 10.2. |
4. Masa pojazdu w przypadku średnich samochodów ciężarowych jednoczłonowych i ciągników, ciężkich samochodów ciężarowych jednoczłonowych i ciągników.
| 4.1 | Jako masę pojazdu wykorzystywaną jako dane wejściowe na potrzeby narzędzia symulacyjnego przyjmuje się skorygowaną rzeczywistą masę pojazdu. |
| 4.2 | Jeżeli nie zamontowano całości standardowego wyposażenia, producent dodaje masę następujących elementów konstrukcyjnych do skorygowanej rzeczywistej masy pojazdu:
|
| 4.3 | Elementy konstrukcyjne, o których mowa w pkt 4.2, mają następującą masę: w przypadku pojazdów należących do grup 1s, 1, 2 i 3 określonych w tabeli 1 załącznika I oraz w przypadku pojazdów należących do grup 51 i 53 określonych w tabeli 2 załącznika I
W przypadku pojazdów należących do grup 4, 5, 9-12 i 16 określonych w tabeli 1 załącznika I.
|
5. Osie napędzane hydraulicznie i mechanicznie
W przypadku pojazdów wyposażonych w:
| a) | osie z napędem hydraulicznym, oś traktuje się jak oś nienapędzaną, a producent nie uwzględnia jej przy ustalaniu konfiguracji osi pojazdu; |
| b) | osie z napędem mechanicznym, oś traktuje się jak oś napędzaną, a producent uwzględnia ją przy ustalaniu konfiguracji osi pojazdu. |
6. Ograniczenia momentu obrotowego silnika w zależności od biegu oraz wyłączenie biegów
6.1. Ograniczenia momentu obrotowego silnika w zależności od biegu
Producent pojazdu może podać uzależnione od biegu ograniczenie maksymalnego momentu obrotowego silnika dla 50 % najwyższych biegów (np. dla biegów 7-12 w przypadku przekładni 12-biegowej), przy czym ograniczenie to nie może przekraczać 95 % maksymalnego momentu obrotowego silnika.
6.2 Wyłączenie biegów
Producent pojazdu może zadeklarować całkowite wyłączenie biegów w przypadku dwóch najwyższych biegów (np. bieg 5 i 6 w przypadku przekładni 6-biegowej), podając w informacjach wejściowych narzędzia symulacyjnego 0 Nm jako ograniczenie momentu obrotowego dla danego biegu.
6.3 Wymagania w zakresie weryfikacji
Ograniczenia momentu obrotowego silnika w zależności od biegu zgodnie z pkt 6.1 oraz wyłączenie biegów zgodnie z pkt 6.2 podlegają weryfikacji w ramach procedury badania weryfikacyjnego określonej w załączniku Xa pkt 6.1.1.1 lit. c).
7. Prędkość obrotowa silnika na biegu jałowym specyficzna dla danego pojazdu
| 7.1. | Prędkość obrotowa silnika na biegu jałowym, którą należy podać dla każdego pojazdu wyposażonego wyłącznie w silniki spalinowe. Wspomniana prędkość obrotowa silnika na biegu jałowym podana dla danego pojazdu jest równa prędkości wskazanej w danych wejściowych dotyczących homologacji silnika lub od niej wyższa. |
8. Nowoczesne systemy wspomagania kierowcy
| 8.1 | W informacjach wejściowych wykorzystywanych przez narzędzie symulacyjne podaje się następujące typy nowoczesnych systemów wspomagania kierowcy, których głównym celem jest zmniejszenie zużycia paliwa i emisji CO2:
System PCC można podać w informacjach wejściowych wykorzystywanych przez narzędzie symulacyjne, jeśli spełnia on funkcje określone w pkt 1 i 2 albo w pkt 1, 2 i 3. |
| 8.2 | Jedenaście kombinacji nowoczesnych systemów wspomagania kierowcy określonych w tabeli 12 stanowi parametry wejściowe do narzędzia symulacyjnego: Kombinacji 2-11 nie podaje się w przypadku przekładni SMT. Kombinacji nr 3, 6, 9 i 11 nie podaje się w przypadku przekładni APT. Tabela 12 Kombinacje nowoczesnych systemów wspomagania kierowcy jako parametry wejściowe do narzędzia symulacyjnego
|
| 8.3 | Każdy nowoczesny system wspomagania kierowcy podany w informacjach wejściowych wykorzystywanych przez narzędzie symulacyjne jest domyślnie ustawiony na tryb oszczędzania paliwa po każdym cyklu włączenia/wyłączenia kluczykiem. |
| 8.4 | Jeśli nowoczesny system wspomagania kierowcy został podany w informacjach wejściowych wykorzystywanych przez narzędzie symulacyjne, musi być zapewniona możliwość zweryfikowania obecności takiego systemu na podstawie jazdy w rzeczywistych warunkach oraz definicji systemu określonych w pkt 8.1. Jeśli zgłoszono określoną kombinację systemów, należy również wykazać współdziałanie funkcji (np. przewidujący tempomat plus system eco-roll z systemem wyłączania-włączania silnika). W procedurze weryfikacji uwzględnia się fakt, że systemy wymagają, aby niektóre warunki brzegowe były »aktywne« (np. aby silnik posiadał temperaturę pracy w przypadku systemu wyłączania-włączania silnika; osiągnięcie określonych zakresów prędkości pojazdu w przypadku tempomatu przewidującego, osiągnięcie określonych współczynników nachylenia drogi do masy pojazdu w przypadku systemu eco-roll). Producent pojazdu musi przedłożyć opis funkcjonalny warunków brzegowych, w przypadku gdy systemy są »nieaktywne« lub ich sprawność jest ograniczona. Organ udzielający homologacji może zażądać od wnioskodawcy ubiegającego się o udzielenie homologacji uzasadnienia technicznego tych warunków brzegowych oraz poddać je ocenie pod względem zgodności. |
9. Objętość ładunku
| 9.1. | W przypadku pojazdów o konfiguracji podwozia typu »van« objętość ładunku oblicza się za pomocą następującego równania:  przy czym wymiary określa się zgodnie z tabelą 13 i rysunkiem 3. Tabela 13 Definicje dotyczące objętości ładunku dla średnich samochodów ciężarowych typu van
|
Rysunek 3
Definicja objętości ładunku dla średnich samochodów ciężarowych
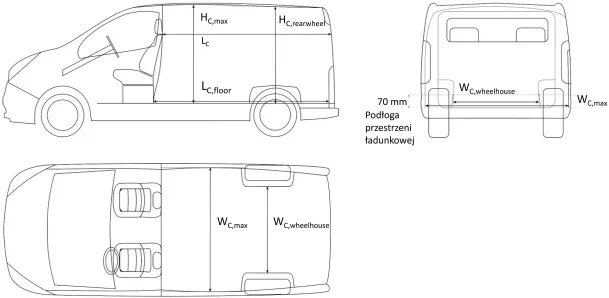
10. Hybrydowy pojazd elektryczny i pojazd wyłącznie elektryczny
Poniższe przepisy stosuje się jedynie w przypadku hybrydowego pojazdu elektrycznego i pojazdu wyłącznie elektrycznego.
10.1 Definicja struktury mechanizmu napędowego pojazdu
10.1.1 Definicja konfiguracji mechanizmu napędowego
Konfigurację mechanizmu napędowego ustala się zgodnie z następującymi definicjami:
W przypadku hybrydowego pojazdu elektrycznego:
| (a) | »P« w przypadku hybrydowego pojazdu elektrycznego z napędem równoległym |
| (b) | »S« w przypadku hybrydowego pojazdu elektrycznego z napędem szeregowym |
| (c) | »S-IEPC« w przypadku, gdy w pojeździe znajduje się zintegrowany elektryczny układ przeniesienia napędu |
| (d) | »IHPC Type 1« w przypadku, gdy parametr »IHPCType« układu maszyny elektrycznej jest ustawiony na »IHPC Type 1«. |
W przypadku pojazdu wyłącznie elektrycznego:
| (a) | »E« w przypadku, gdy w pojeździe znajduje się układ maszyny elektrycznej |
| (b) | »E-IEPC« w przypadku, gdy w pojeździe znajduje się zintegrowany elektryczny układ przeniesienia napędu |
10.1.2 Ustalanie położenia maszyny elektrycznej w mechanizmie napędowym pojazdu
W przypadku gdy konfiguracja mechanizmu napędowego pojazdu zgodnie z pkt 10.1.1 to »P«, »S« lub »E«, położenie maszyny elektrycznej zainstalowanej w mechanizmie napędowym pojazdu określa się zgodnie z definicjami zawartymi w tabeli 14.
Tabela 14
Możliwe położenia maszyny elektrycznej w mechanizmie napędowym pojazdu
| Indeks położenia maszyny elektrycznej | Konfiguracja mechanizmem napędowym zgodnie z pkt 10.1.1. | Typ przekładni zgodnie z tabelą 1 w dodatku 12 do załącznika VI | Definicja / Wymogi (2) | Dodatkowe wyjaśnienia |
| 1 | P | AMT, APT-S, APT-P | Połączona z mechanizmem napędowym przed sprzęgłem (w przypadku AMT) lub przed wałem wejściowym przemiennika momentu obrotowego (w przypadku APT-S lub APT-P). Maszyna elektryczna jest połączona z wałem korbowym silnika spalinowego bezpośrednio lub za pomocą połączenia mechanicznego (np. pasek). | Rozróżnienie P0: Maszyny elektryczne, które z zasady nie mogą przyczyniać się do napędu pojazdu (np. alternatory), są uwzględniane w danych wejściowych układów pomocniczych (zob. tabela 3 w niniejszym załączniku dotycząca samochodów ciężarowych, tabela 3a w niniejszym załączniku dotycząca autobusów oraz załącznik IX). Maszyny elektryczne w tym położeniu, które zasadniczo mogą przyczynić się do napędu pojazdu, ale dla których zadeklarowany maksymalny moment obrotowy jest ustawiony na zero zgodnie z tabelą 9 w niniejszym załączniku, deklaruje się jednak jako »P1«. |
| 2 | P | AMT | Maszyna elektryczna jest połączona z mechanizmem napędowym za sprzęgłem oraz przed wałem wejściowym przekładni. |
|
| 2 | E, S | AMT, APT-N, APT-S, APT-P | Maszyna elektryczna jest połączona z mechanizmem napędowym przed wałem wejściowym przekładni (w przypadku AMT lub APT-N) lub przed wałem wejściowym przemiennika momentu obrotowego (w przypadku APT-S, APT-P). |
|
| 2,5 | P | AMT, APT-S, APT-P | Maszyna elektryczna jest połączona z mechanizmem napędowym za sprzęgłem (w przypadku AMT) lub za wałem wejściowym przemiennika momentu obrotowego (w przypadku APT-S lub APT-P) oraz przed wałem zdawczym przekładni. | Maszyna elektryczna jest połączona z określonym wałem wewnątrz przekładni (np. wałem pośrednim). Podaje się określony współczynnik przełożenia dla każdego biegu mechanicznego w przekładni zgodnie z tabelą 8. |
| 3 | P | AMT, APT-S, APT-P | Maszyna elektryczna jest połączona z mechanizmem napędowym za wałem zdawczym przekładni oraz przed osią. |
|
| 3 | E, S | nie dotyczy | Maszyna elektryczna jest połączona z mechanizmem napędowym przed osią. |
|
| 4 | P | AMT, APT-S, APT-P | Maszyna elektryczna jest połączona z mechanizmem napędowym za osią. |
|
| 4 | E, S | nie dotyczy | Maszyna elektryczna jest połączona z piastą koła i ten sam układ jest zamontowany dwukrotnie w ramach zastosowania symetrycznego (tzn. jeden po lewej i jeden po prawej stronie pojazdu w tym samym położeniu koła w kierunku wzdłużnym). |
|
| GEN | S | nie dotyczy | Maszyna elektryczna jest połączona mechanicznie z silnikiem spalinowym, ale w żadnych warunkach roboczych nie jest połączona mechanicznie z kołami pojazdu. |
|
10.1.3 Określenie identyfikatora struktury mechanizmu napędowego
Zgodnie z wymaganiami określonymi w tabeli 7 wartość wejściową identyfikatora struktury mechanizmu napędowego określa się na podstawie konfiguracji mechanizmu napędowego zgodnie z pkt 10.1.1 oraz położenia maszyny elektrycznej w mechanizmie napędowym pojazdu zgodnie z pkt 10.1.2 (w stosownych przypadkach) na podstawie prawidłowych kombinacji danych wejściowych do narzędzia symulacyjnego wymienionych w tabeli 15.
W przypadku konfiguracji mechanizmu napędowego zgodnie z pkt 10.1.1 jest »IHPC Type 1«, zastosowanie mają następujące przepisy:
| (a) | Identyfikator struktury mechanizmu napędowego »P2« deklaruje się zgodnie z tabelą 7, przy czym dane dotyczące części mechanizmu napędowego, jak wskazano w tabeli 15 w odniesieniu do »P2«, stanowią dane wejściowe wykorzystywane przez narzędzie symulacyjne z oddzielnymi danymi dotyczącymi maszyny elektrycznej i przekładni, określonymi zgodnie z załącznikiem Xb pkt 4.4.3. |
| (b) | Dane dotyczące maszyny elektrycznej zgodnie z lit. a) wprowadza się do narzędzia symulacyjnego, przy czym parametr »PowertrainPosition« ustawia się na »2« zgodnie z tabelą 8. |
Tabela 15
Prawidłowe dane wejściowe dotyczące struktury mechanizmu napędowego wykorzystywane w narzędziu symulacyjnym
| Typ mechanizmu napędowego | Konfiguracja mechanizmu napędowego | Identyfikator struktury dla danych wejściowych VECTO | Część mechanizmu napędowego znajdująca się w pojeździe | Uwagi | |||||||
| Silnik spalinowy | Położenie maszyny elektrycznej GEN | Położenie maszyny elektrycznej 1 | Położenie maszyny elektrycznej 2 | przekładnia | Położenie maszyny elektrycznej 3 | oś | Położenie maszyny elektrycznej 4 | ||||
| Pojazd wyłącznie elektryczny | E | E2 | nie | nie | nie | tak | tak | nie | tak | nie |
|
| E3 | nie | nie | nie | nie | nie | tak | tak | nie |
| ||
| E4 | nie | nie | nie | nie | nie | nie | nie | tak |
| ||
| IEPC | E-IEPC | nie | nie | nie | nie | nie | nie | (3) | nie |
| |
| Hybrydowy pojazd elektryczny | P | P1 | tak | nie | tak | nie | tak | nie | tak | nie |
|
| P2 | tak | nie | nie | tak | tak | nie | tak | nie | (4) | ||
| P2.5 | tak | nie | nie | tak | tak | nie | tak | nie | (5) | ||
| P3 | tak | nie | nie | nie | tak | tak | tak | nie | (6) | ||
| P4 | tak | nie | nie | nie | tak | nie | tak | tak |
| ||
| S | S2 | tak | tak | nie | tak | tak | nie | tak | nie |
| |
| S3 | tak | tak | nie | nie | nie | tak | tak | nie |
| ||
| S4 | tak | tak | nie | nie | nie | nie | nie | tak |
| ||
| S-IEPC | tak | tak | nie | nie | nie | nie | (3) | nie |
| ||
10.2 Określenie ograniczenia doładowania w hybrydowym pojeździe elektrycznym z napędem równoległym
W celu ograniczenia doładowania w pojeździe producent pojazdu może zadeklarować ograniczenie napędowego momentu obrotowego całego mechanizmu napędowego w odniesieniu do wału wejściowego przekładni hybrydowego pojazdu elektrycznego z napędem równoległym.
Zadeklarowanie takich ograniczeń jest dozwolone jedynie w przypadku, gdy konfiguracja mechanizmu napędowego to »P« lub »IHPC Type 1« zgodnie z pkt 10.1.1.
Ograniczenia deklaruje się jako dopuszczalny dodatkowy moment obrotowy powyżej krzywej pełnego obciążenia silnika spalinowego, w zależności od prędkości obrotowej wału wejściowego przekładni. W narzędziu symulacyjnym przeprowadza się interpolację liniową w celu określenia odpowiedniego dodatkowego momentu obrotowego pomiędzy podanymi wartościami przy dwóch określonych prędkościach obrotowych. W zakresie prędkości obrotowej od 0 do prędkości obrotowej silnika na biegu jałowym (zgodnie z pkt 7.1) moment obrotowy przy pełnym obciążeniu dostępny w przypadku silnika spalinowego jest równy jedynie momentowi obrotowemu przy pełnym obciążeniu silnika spalinowego przy prędkości obrotowej silnika na biegu jałowym ze względu na modelowanie zachowania się sprzęgła w momencie uruchomienia pojazdu.
W przypadku deklarowania takiego ograniczenia wartości dodatkowego momentu obrotowego podaje się co najmniej przy prędkości obrotowej 0 oraz przy maksymalnej prędkości obrotowej wynikającej z krzywej pełnego obciążenia silnika spalinowego. Można podać dowolną liczbę wartości w przedziale od zera do maksymalnej prędkości obrotowej wynikającej krzywej pełnego obciążenia silnika spalinowego. Deklarowane wartości mniejsze od zera nie są dozwolone dla dodatkowego momentu obrotowego.
Producent pojazdu może zadeklarować ograniczenia, które dokładnie odpowiadają krzywej pełnego obciążenia silnika spalinowego, podając wartości wynoszące 0 Nm dla dodatkowego momentu obrotowego.
10.3 System wyłączania-włączania silnika w przypadku hybrydowych pojazdów elektrycznych
W przypadku gdy pojazd posiada system wyłączania-włączania silnika zgodnie z pkt 8.1.1 z uwzględnieniem warunków brzegowych określonych w pkt 8.4, dla parametru wejściowego P271 ustawia się wartość »true« zgodnie z tabelą 6.
11. Przenoszenie wyników narzędzia symulacyjnego na inne pojazdy
| 11.1. | Wyniki narzędzia symulacyjnego można przenosić na inne pojazdy, jak przewidziano w art. 9 ust. 6, o ile spełnione są wszystkie następujące warunki:
|
| 11.2. | Do celów przenoszenia wyników uwzględnia się następujące pliki wyników:
|
| 11.3. | W celu dokonania przeniesienia wyników pliki wymienione w pkt 10.2 zmodyfikuje się, zastępując elementy danych określone w podpunktach aktualnymi informacjami. Zmiany dopuszcza się jedynie w odniesieniu do elementów danych związanych z bieżącym etapem skompletowania. 11.3.1 Dokumentacja producenta
11.3.2 Dokumentacja informacyjna przeznaczona dla klientów
11.3.3 Dokumentacja pojazdu
11.3.4 Po wprowadzeniu opisanych powyżej zmian należy zaktualizować elementy podpisu określone poniżej.
|
| 11.4. | Jeżeli nie można określić poziomu emisji CO2 i zużycia paliwa w pojeździe podstawowym ze względu na nieprawidłowe działanie narzędzia symulacyjnego, takie same środki stosuje się do pojazdów z przeniesionymi wynikami. |
| 11.5. | Jeżeli producent stosuje określone w niniejszym punkcie podejście do przenoszenia wyników na inne pojazdy, związany z tym proces przedstawia się organowi udzielającemu homologacji w ramach przyznawania licencji na przeprowadzenie procesu. |
"Dodatek 1
Technologie stosowane w pojazdach, w przypadku których nie mają zastosowania zobowiązania określone w art. 9 ust. 1 akapit pierwszy, jak przewidziano w tym akapicie
Tabela 1
| Kategoria technologii stosowanej w pojazdach | Kryteria wyłączenia | Wartość parametru wejściowego zgodnie z tabelą 5 niniejszego załącznika | ||||||
| Pojazd zasilany ogniwami paliwowymi | Pojazd jest pojazdem zasilanym ogniwami paliwowymi albo pojazdem hybrydowym zasilanym ogniwami paliwowymi zgodnie z pkt 2 ppkt 12 lub 13 niniejszego załącznika. | »Pojazd zasilany ogniwami paliwowymi wyłączony zgodnie z art. 9« | ||||||
| Silnik spalinowy zasilany wodorem | Pojazd jest wyposażony w silnik spalinowy, który może być zasilany wodorowymi ogniwami paliwowymi. | »Silnik spalinowy zasilany wodorem wyłączony zgodnie z art. 9« | ||||||
| Silnik dwupaliwowy | Pojazdy dwupaliwowe typu 1B, 2B i 3B określone w art. 2 pkt 53, 55 i 56 rozporządzenia (UE) nr 582/2011 | »Pojazd dwupaliwowy wyłączony zgodnie z art. 9« | ||||||
| Hybrydowy pojazd elektryczny | Pojazdy są objęte wyłączeniem, jeżeli co najmniej jedno z poniższych kryteriów jest spełnione:
| »Hybrydowy pojazd elektryczny wyłączony zgodnie z art. 9« | ||||||
| Pojazd wyłącznie elektryczny | Pojazdy są objęte wyłączeniem, jeżeli co najmniej jedno z poniższych kryteriów jest spełnione:
| »Pojazd wyłącznie elektryczny wyłączony zgodnie z art. 9« | ||||||
| Wiele trwale mechanicznie niezależnych układów przeniesienia napędu | Pojazd jest wyposażony w więcej niż jeden mechanizm napędowy, przy czym każdy mechanizm napędowy napędza inną oś lub osie pojazdu, a poszczególne mechanizmy napędowe w żadnym wypadku nie mogą być mechanicznie połączone. W tym względzie osie napędzane hydraulicznie, zgodnie z pkt 5 lit. a) niniejszego załącznika, traktuje się jako osie nienapędzane, w związku z czym nie zalicza się ich do niezależnego mechanizmu napędowego. | »Wiele układów przeniesienia napędu wyłączonych zgodnie z art. 9« | ||||||
| Ładowanie podczas jazdy | Pojazd jest wyposażony w środki do przewodzenia lub indukcyjnego dostarczania energii elektrycznej do pojazdu znajdującego się w ruchu, która jest przynajmniej częściowo bezpośrednio wykorzystywana do napędzania pojazdu i opcjonalnie do ładowania układu magazynowania energii wielokrotnego ładowania. | »Ładowanie podczas jazdy wyłączone zgodnie z art. 9« | ||||||
| Hybrydowy pojazd silnikowy z napędem nieelektrycznym | Pojazd jest hybrydowym pojazdem silnikowym, ale nie jest hybrydowym pojazdem elektrycznym zgodnie pkt 2 ppkt 26 i ppkt 27 niniejszego załącznika. | »Hybrydowy pojazd silnikowy wyłączony zgodnie z art. 9« |
| (*) | Rozporządzenie Komisji (UE) nr 1230/2012 z dnia 12 grudnia 2012 r. w sprawie wykonania rozporządzenia (WE) nr 661/2009 Parlamentu Europejskiego i Rady w odniesieniu do wymagań w zakresie homologacji typu dotyczących mas i wymiarów pojazdów silnikowych oraz zmieniające dyrektywę 2007/46/WE Parlamentu Europejskiego i Rady (Dz.U. L 353 z 21.12.2012, s. 31). |
| (**) | Rozporządzenie Parlamentu Europejskiego i Rady (UE) 2019/2144 z dnia 27 listopada 2019 r. w sprawie wymogów dotyczących homologacji typu pojazdów silnikowych i ich przyczep oraz układów, komponentów i oddzielnych zespołów technicznych przeznaczonych do tych pojazdów, w odniesieniu do ich ogólnego bezpieczeństwa oraz ochrony osób znajdujących się w pojeździe i niechronionych uczestników ruchu drogowego, zmieniające rozporządzenie Parlamentu Europejskiego i Rady (UE) 2018/858 oraz uchylające rozporządzenia Parlamentu Europejskiego i Rady (WE) nr 78/2009, (WE) nr 79/2009 i (WE) nr 661/2009 oraz rozporządzenia Komisji (WE) nr 631/2009, (UE) nr 406/2010, (UE) nr 672/2010, (UE) nr 1003/2010, (UE) nr 1005/2010, (UE) nr 1008/2010, (UE) nr 1009/2010, (UE) nr 19/2011, (UE) nr 109/2011, (UE) nr 458/2011, (UE) nr 65/2012, (UE) nr 130/2012, (UE) nr 347/2012, (UE) nr 351/2012, (UE) nr 1230/2012 i (UE) 2015/166 (Dz.U. L 325 z 16.12.2019, s. 1).. |
(1) W przypadku gdy na przekładni zainstalowanych jest wiele PTO podaje się wyłącznie część o największej stracie zgodnie z pkt 3.6 załącznika IX w odniesieniu do kombinacji jej kryteriów »PTOShaftsGearWheels« oraz »PTOShaftsOtherElements«.
(2) W tym przypadku termin »maszyna elektryczna« obejmuje dodatkową część ADC, jeżeli taka część występuje.
(3) »Tak« (tj. oś jest obecna) tylko w przypadku, gdy dla obu parametrów »DifferentialIncluded« i »DesignTypeWheelMotor« ustawiono wartość »false«.
(4) Nie dotyczy przekładni APT-S i APT-P.
(5) W przypadku gdy maszyna elektryczna jest połączona z określonym wałem wewnątrz przekładni (np. wałem pośrednim) zgodnie z definicją zawartą w tabeli 8.
(6) Nie dotyczy pojazdów z napędem na przednie koła.
ZAŁĄCZNIK IV
"ZAŁĄCZNIK IV
WZÓR PLIKÓW WYJŚCIOWYCH NARZĘDZIA SYMULACYJNEGO
1. Wprowadzenie
W niniejszym załączniku opisano wzory dokumentacji producenta, dokumentacji informacyjnej przeznaczonej dla klientów i dokumentacji pojazdu.
2. Definicje
| (1) | »rzeczywisty zasięg z rozładowaniem«: zasięg, jaki można pokonać w trybie rozładowania, w oparciu o możliwą do wykorzystania ilość energii układu magazynowania energii wielokrotnego ładowania, bez konieczności doładowania; |
| (2) | »równoważny zasięg przy zasilaniu energią elektryczną«: część rzeczywistego zasięgu z rozładowaniem, którą można przypisać wykorzystaniu energii elektrycznej z układu magazynowania energii wielokrotnego ładowania, tj. bez energii dostarczanej przez nieelektryczny układ magazynowania energii napędowej; |
| (3) | »zasięg bez generowania emisji CO2«: zasięg, który można przypisać energii zapewnianej przez układ magazynowania energii napędowej, rozpatrywany pod względem generowania zerowych emisji CO2. |
3. Wzór plików wyjściowych
CZĘŚĆ I
Emisje CO2 generowane przez pojazd i zużycie paliwa przez pojazd - dokumentacja producenta
Narzędzie symulacyjne generuje dokumentację producenta zawierającą co najmniej następujące informacje, jeżeli mają one zastosowanie do danego pojazdu lub etapu produkcji:
| 1. | Dane dotyczące pojazdu, części, oddzielnego zespołu technicznego i układów |
| 1.1. | Dane dotyczące pojazdu |
| 1.1.1. | Nazwa i adres producenta lub producentów… |
| 1.1.2. | Model pojazdu / nazwa handlowa… |
| 1.1.3. | Numer identyfikacyjny pojazdu (VIN)… |
| 1.1.4. | Kategoria pojazdu (N2, N3, M3)… |
| 1.1.5. | Konfiguracja osi… |
| 1.1.6. | Maksymalna masa całkowita (t)… |
| 1.1.7. | Grupa pojazdów zgodnie z załącznikiem I… |
| 1.1.7a. | (Pod)grupa pojazdów w zakresie norm emisji CO2… |
| 1.1.8. | Skorygowana rzeczywista masa (kg)… |
| 1.1.9. | Pojazd specjalistyczny (tak/nie)… |
| 1.1.10. | Bezemisyjny pojazd ciężki (tak/nie)… |
| 1.1.11. | Hybrydowy pojazd ciężki z napędem elektrycznym (tak/nie)… |
| 1.1.12. | Pojazd dwupaliwowy (tak/nie)… |
| 1.1.13. | Kabina sypialna (tak/nie)… |
| 1.1.14. | Struktura hybrydowego pojazdu elektrycznego (np. P1, P2)… |
| 1.1.15. | Struktura pojazdu wyłącznie elektrycznego (np. E2, E3)… |
| 1.1.16. | Doładowywany zewnętrznie (tak/nie)… |
| 1.1.17. | - |
| 1.1.18. | Moc maksymalna ładowania zewnętrznego (kW)… |
| 1.1.19. | Technologia stosowana w pojazdach wyłączona zgodnie z art. 9… |
| 1.1.20. | Klasa autobusu (np. I, I+II itp.)… |
| 1.1.21. | Liczba miejsc pasażerskich na pokładzie górnym… |
| 1.1.22. | Liczba miejsc pasażerskich na pokładzie dolnym… |
| 1.1.23. | Kod nadwozia (np. CA, CB)… |
| 1.1.24. | Obniżone wejście (tak/nie)… |
| 1.1.25. | Wysokość nadwozia zintegrowanego (mm)… |
| 1.1.26. | Długość pojazdu (mm)… |
| 1.1.27. | Szerokość pojazdu (mm)… |
| 1.1.28. | Technologia sterowania drzwiami (pneumatyczna, elektryczna, mieszana)… |
| 1.1.29. | Układ zbiornika w przypadku gazu ziemnego (sprężonego, skroplonego)… |
| 1.1.30. | Suma mocy netto (tylko w przypadku wyłączenia zgodnie z art. 9) (kW)… |
| 1.2. | Najważniejsze specyfikacje silnika |
| 1.2.1. | Model silnika… |
| 1.2.2. | Numer certyfikacji silnika… |
| 1.2.3. | Moc znamionowa silnika (kW)… |
| 1.2.4. | Prędkość obrotowa silnika na biegu jałowym (1/min)… |
| 1.2.5. | Prędkość znamionowa silnika (1/min)… |
| 1.2.6. | Pojemność silnika (l)… |
| 1.2.7. | Rodzaj paliwa (olej napędowy CI/sprężony gaz ziemny PI/skroplony gaz ziemny PI)… |
| 1.2.8. | Skrót danych wejściowych i informacji wejściowych dotyczących silnika… |
| 1.2.9. | Układ odzysku ciepła odpadowego (tak/nie)… |
| 1.2.10. | Rodzaj lub rodzaje odzysku ciepła odpadowego (mechaniczny/elektryczny)… |
| 1.3. | Najważniejsze specyfikacje przekładni |
| 1.3.1. | Model przekładni… |
| 1.3.2. | Numer certyfikacji przekładni… |
| 1.3.3. | Opcja najczęściej wykorzystywana do stworzenia map strat (Opcja1/Opcja2/Opcja3/Wartości standardowe)… |
| 1.3.4. | Typ przekładni (SMT, AMT, APT-S, APT-P, APT-N)… |
| 1.3.5. | Liczba biegów… |
| 1.3.6. | Współczynnik przełożenia całkowitego na najwyższym biegu… |
| 1.3.7. | Typ zwalniacza… |
| 1.3.8. | Przystawka odbioru mocy (tak/nie)… |
| 1.3.9. | Skrót danych wejściowych i informacji wejściowych dotyczących przekładni… |
| 1.4. | Specyfikacje zwalniacza |
| 1.4.1. | Model zwalniacza… |
| 1.4.2. | Numer certyfikacji zwalniacza… |
| 1.4.3. | Opcja certyfikacji stosowana do generowania mapy strat (wartości standardowe / pomiar)… |
| 1.4.4. | Skrót danych wejściowych i informacji wejściowych dotyczących innych części przenoszących moment obrotowy… |
| 1.5. | Specyfikacja przemiennika momentu obrotowego |
| 1.5.1. | Model przemiennika momentu obrotowego… |
| 1.5.2. | Numer certyfikacji przemiennika momentu obrotowego… |
| 1.5.3. | Opcja certyfikacji stosowana do generowania mapy strat (wartości standardowe / pomiar)… |
| 1.5.4. | Skrót danych wejściowych i informacji wejściowych dotyczących przemiennika momentu obrotowego… |
| 1.6. | Specyfikacje napędu kątowego |
| 1.6.1. | Model napędu kątowego… |
| 1.6.2. | Numer certyfikacji napędu kątowego… |
| 1.6.3. | Opcja certyfikacji stosowana do generowania mapy strat (wartości standardowe / pomiar)… |
| 1.6.4. | Przełożenie napędu kątowego… |
| 1.6.5. | Skrót danych wejściowych i informacji wejściowych dotyczących dodatkowych części układu napędowego… |
| 1.7. | Specyfikacje osi |
| 1.7.1. | Model osi… |
| 1.7.2. | Numer certyfikacji osi… |
| 1.7.3. | Opcja certyfikacji stosowana do generowania mapy strat (wartości standardowe / pomiar)… |
| 1.7.4. | Typ osi (np. oś z pojedynczą redukcją)… |
| 1.7.5. | Przełożenie osi… |
| 1.7.6. | Skrót danych wejściowych i informacji wejściowych dotyczących osi… |
| 1.8. | Aerodynamika |
| 1.8.1. | Model… |
| 1.8.2. | Opcja certyfikacji stosowana do generowania CdxA (wartości standardowe / pomiar)… |
| 1.8.3. | Numer certyfikacji CdxA (w stosownych przypadkach)… |
| 1.8.4. | Wartość CdxA… |
| 1.8.5. | Skrót danych wejściowych i informacji wejściowych dotyczących oporu powietrza… |
| 1.9. | Najważniejsze specyfikacje opony |
| 1.9.1. | Wymiary opon na osi 1… |
| 1.9.2. | Numer certyfikacji opony na osi 1… |
| 1.9.3. | Określony współczynnik oporu toczenia wszystkich opon na osi 1… |
| 1.9.3a. | Skrót danych wejściowych dotyczących opony i informacji wejściowych dotyczących osi 1… |
| 1.9.4. | Wymiary opon na osi 2… |
| 1.9.5. | Osie bliźniacze (tak/nie) na osi 2… |
| 1.9.6. | Numer certyfikacji opony na osi 2… |
| 1.9.7. | Określony współczynnik oporu toczenia wszystkich opon na osi 2… |
| 1.9.7a. | Skrót danych wejściowych dotyczących opony i informacji wejściowych dotyczących osi 2… |
| 1.9.8. | Wymiary opon na osi 3… |
| 1.9.9. | Osie bliźniacze (tak/nie) na osi 3… |
| 1.9.10. | Numer certyfikacji opony na osi 3… |
| 1.9.11. | Określony współczynnik oporu toczenia wszystkich opon na osi 3… |
| 1.9.11a. | Skrót danych wejściowych dotyczących opony i informacji wejściowych dotyczących osi 3… |
| 1.9.12. | Wymiary opon na osi 4… |
| 1.9.13. | Osie bliźniacze (tak/nie) na osi 4… |
| 1.9.14. | Numer certyfikacji opony na osi 4… |
| 1.9.15. | Określony współczynnik oporu toczenia wszystkich opon na osi 4… |
| 1.9.16. | Skrót danych wejściowych dotyczących opony i informacji wejściowych dotyczących osi 4… |
| 1.10. | Specyfikacje systemów pomocniczych |
| 1.10.1. | Technologia wentylatora chłodzącego silnik… |
| 1.10.2. | Technologia pompy wspomagania… |
| 1.10.3. | Układ elektryczny |
| 1.10.3.1. | Technologia alternatora (konwencjonalna, inteligentna, brak alternatora)… |
| 1.10.3.2. | Maksymalna moc alternatora (inteligentny alternator) (kW)… |
| 1.10.3.3. | Zdolność magazynowania energii elektrycznej (inteligentny alternator) (kWh)… |
| 1.10.3.4. | Światła do jazdy dziennej LED (tak/nie)… |
| 1.10.3.5. | Reflektory samochodowe LED (tak/nie)… |
| 1.10.3.6. | Światła pozycyjne LED (tak/nie)… |
| 1.10.3.7. | Światła hamowania LED (tak/nie)… |
| 1.10.3.8. | Oświetlenie wewnętrzne LED (tak/nie)… |
| 1.10.4. | Układ pneumatyczny |
| 1.10.4.1. | Technologia… |
| 1.10.4.2. | Przełożenie sprężarki… |
| 1.10.4.3. | Inteligentny system sprężania… |
| 1.10.4.4. | Inteligentny system regeneracji… |
| 1.10.4.5. | Sterowanie zawieszenia pneumatycznego… |
| 1.10.4.6. | Układ dozowania odczynnika (oczyszczanie spalin)… |
| 1.10.5. | Układ HVAC |
| 1.10.5.1. | Numer konfiguracji układu… |
| 1.10.5.2. | Typ pompy ciepła do chłodzenia przedziału kierowcy… |
| 1.10.5.3. | Tryb ogrzewania przedziału kierowcy za pomocą pompy ciepła… |
| 1.10.5.4. | Typ pompy ciepła do chłodzenia przedziału pasażerskiego… |
| 1.10.5.5. | Tryb ogrzewania przedziału pasażerskiego za pomocą pompy ciepła… |
| 1.10.5.6. | Moc pomocniczego urządzenia grzewczego (kW)… |
| 1.10.5.7. | Oszklenie zespolone (tak/nie)… |
| 1.10.5.8. | Regulowany termostat chłodziwa (tak/nie)… |
| 1.10.5.9. | Regulowane pomocnicze urządzenie grzewcze… |
| 1.10.5.10. | Wymiennik ciepła gazów odlotowych silnika (tak/nie)… |
| 1.10.5.11. | Oddzielne kanały rozprowadzania powietrza (tak/nie)… |
| 1.10.5.12. | Elektryczna nagrzewnica wodna |
| 1.10.5.13. | Elektryczna nagrzewnica powietrza |
| 1.10.5.14. | Inna technologia grzewcza |
| 1.11. | Ograniczenia momentu obrotowego silnika |
| 1.11.1. | Ograniczenie momentu obrotowego silnika na pierwszym biegu (% maksymalnego momentu obrotowego silnika)… |
| 1.11.2. | Ograniczenie momentu obrotowego silnika na drugim biegu (% maksymalnego momentu obrotowego silnika)… |
| 1.11.3. | Ograniczenie momentu obrotowego silnika na trzecim biegu (% maksymalnego momentu obrotowego silnika)… |
| 1.11.4. | Ograniczenie momentu obrotowego silnika na ... biegu (% maksymalnego momentu obrotowego silnika) |
| 1.12. | Nowoczesne systemy wspomagania kierowcy (ADAS) |
| 1.12.1. | System wyłączania-włączania silnika podczas postojów pojazdu (tak/nie)… |
| 1.12.2. | System eco-roll bez systemu wyłączania-włączania silnika (tak/nie)… |
| 1.12.3. | System eco-roll z systemem wyłączania-włączania silnika (tak/nie)… |
| 1.12.4. | Tempomat przewidujący (tak/nie)… |
| 1.13. | Specyfikacje układu lub układów maszyny elektrycznej |
| 1.13.1 | Model… |
| 1.13.2. | Numer certyfikacji |
| 1.13.3 | Typ (PSM, ESM, IM, SRM)… |
| 1.13.4. | Położenie (GEN 1, 2, 3, 4)… |
| 1.13.5. | - |
| 1.13.6. | Liczba w położeniu… |
| 1.13.7. | Moc znamionowa (kW)… |
| 1.13.8. | Maksymalna moc ciągła (kW)… |
| 1.13.9. | Opcja certyfikacji stosowana do generowania mapy zużycia mocy elektrycznej… |
| 1.13.10. | Skrót danych wejściowych i informacji wejściowych… |
| 1.13.11. | Model ADC… |
| 1.13.12. | Numer certyfikacji ADC… |
| 1.13.13. | Opcja certyfikacji stosowana do generowania mapy strat ADC (wartości standardowe / pomiar)… |
| 1.13.14. | Przełożenie ADC… |
| 1.13.15. | Skrót danych wejściowych i informacji wejściowych dotyczących dodatkowych części układu przeniesienia napędu… |
| 1.14. | Specyfikacje zintegrowanego elektrycznego mechanizmu napędowego (IEPC) |
| 1.14.1 | Model… |
| 1.14.2. | Numer certyfikacji… |
| 1.14.3. | Moc znamionowa (kW)… |
| 1.14.4. | Maksymalna moc ciągła (kW)… |
| 1.14.5. | Liczba biegów… |
| 1.14.6. | Najniższy całkowity współczynnik przełożenia (najwyższe przełożenie razy przełożenie osi, w stosownych przypadkach)… |
| 1.14.7. | Wyposażony w mechanizm różnicowy (tak/nie)… |
| 1.14.8. | Opcja certyfikacji stosowana do generowania mapy zużycia mocy elektrycznej… |
| 1.14.9. | Skrót danych wejściowych i informacji wejściowych… |
| 1.15. | Specyfikacje układów magazynowania energii wielokrotnego ładowania |
| 1.15.1 | Model… |
| 1.15.2. | Numer certyfikacji… |
| 1.15.3. | Napięcie znamionowe (V)… |
| 1.15.4. | Całkowita zdolność magazynowania energii (kWh)… |
| 1.15.5. | Całkowita moc użytkowa w symulacji (kWh)… |
| 1.15.6. | Opcja certyfikacji dotycząca strat w układzie elektrycznym… |
| 1.15.7. | Skrót danych wejściowych i informacji wejściowych… |
| 1.15.8. | StringID (-)… |
| 2. | Charakterystyka zadania i wartości zależne od obciążenia |
| 2.1. | Parametry symulacji (dla każdego profilu zadań i kombinacji obciążenia, w przypadku hybrydowych pojazdów elektrycznych doładowywanych zewnętrznie, dodatkowo w trybie rozładowania, trybie ładowania podtrzymującego i ważonym) |
| 2.1.1. | Profil zadań… |
| 2.1.2. | Obciążenie (zgodnie z definicją zawartą w narzędziu symulacyjnym) (kg)… |
| 2.1.2a. | Liczba pasażerów… |
| 2.1.3. | Masa całkowita pojazdu w symulacji (kg)… |
| 2.1.4. | Tryb zewnętrznego ładowania pojazdu (tryb rozładowania, tryb ładowania podtrzymującego, ważony)… |
| 2.2. | Osiągi pojazdu podczas jazdy i informacje do celów przeprowadzenia kontroli jakości symulacji |
| 2.2.1. | Średnia prędkość (km/h)… |
| 2.2.2. | Minimalna prędkość chwilowa (km/h)… |
| 2.2.3. | Maksymalna prędkość chwilowa (km/h)… |
| 2.2.4. | Maksymalne opóźnienie (m/s2)… |
| 2.2.5. | Maksymalne przyspieszenie (m/s2)… |
| 2.2.6. | Procentowy udział czasu jazdy przy pełnym obciążeniu… |
| 2.2.7. | Całkowita liczba zmian biegów… |
| 2.2.8. | Całkowita przebyta odległość (w km)… |
| 2.3. | Zużycie paliwa oraz zużycie energii (według rodzaju paliwa i energii elektrycznej) oraz wyniki w zakresie emisji CO2 (łącznie) |
| 2.3.1. | Zużycie paliwa (g/km)… |
| 2.3.2. | Zużycie paliwa (g/t-km)… |
| 2.3.3. | Zużycie paliwa (g/p-km)… |
| 2.3.4. | Zużycie paliwa (g/m3-km)… |
| 2.3.5. | Zużycie paliwa (l/100km)… |
| 2.3.6. | Zużycie paliwa (l/t-km)… |
| 2.3.7. | Zużycie paliwa (l/p-km)… |
| 2.3.8. | Zużycie paliwa (l/m3-km)… |
| 2.3.9. | Zużycie energii (MJ/km, kWh/km)… |
| 2.3.10. | Zużycie energii (MJ/t-km, kWh/t-km)… |
| 2.3.11. | Zużycie energii (MJ/p-km, kWh/p-km)… |
| 2.3.12. | Zużycie energii (MJ/m3-km, kWh/m3-km)… |
| 2.3.13. | CO2 (g/km)… |
| 2.3.14. | CO2 (g/t-km)… |
| 2.3.15. | CO2 (g/p-km)… |
| 2.3.16. | CO2 (g/m3-km)… |
| 2.4. | Zasięg przy zasilaniu energią elektryczną i zasięg bez generowania emisji |
| 2.4.1. | Rzeczywisty zasięg z rozładowaniem (km)… |
| 2.4.2. | Równoważny zasięg przy zasilaniu energią elektryczną (km)… |
| 2.4.3. | Zasięg bez generowania emisji CO2 (km)… |
| 3. | Informacje o oprogramowaniu |
| 3.1. | Wersja narzędzia symulacyjnego (X.X.X)… |
| 3.2. | Data i godzina symulacji… |
| 3.3. | Skrót kryptograficzny informacji i danych wejściowych narzędzia symulacyjnego dotyczących pojazdu podstawowego (w stosownych przypadkach)… |
| 3.4. | Skrót kryptograficzny dokumentacji producenta pojazdu podstawowego (w stosownych przypadkach)… |
| 3.5. | Skrót kryptograficzny dokumentacji pojazdu wygenerowanej przez narzędzie symulacyjne (w stosownych przypadkach)… |
| 3.6. | Skrót kryptograficzny informacji i danych wejściowych narzędzia symulacyjnego… |
| 3.7. | Skrót kryptograficzny dokumentacji producenta… |
CZĘŚĆ II
Emisje CO2 generowane przez pojazd i zużycie paliwa przez pojazd - dokumentacja dla klientów
Narzędzie symulacyjne generuje dokumentację informacyjną przeznaczoną dla klientów, zawierającą co najmniej następujące informacje, jeśli mają one zastosowanie dla danego pojazdu lub etapu certyfikacji:
| 1. | Dane dotyczące pojazdu, części, oddzielnego zespołu technicznego i układów |
| 1.1. | Dane dotyczące pojazdu |
| 1.1.1. | Numer identyfikacyjny pojazdu (VIN)… |
| 1.1.2. | Kategoria pojazdu (N2, N3, M3)… |
| 1.1.3. | Konfiguracja osi… |
| 1.1.4. | Maksymalna masa całkowita (t)… |
| 1.1.5. | Grupa pojazdów zgodnie z załącznikiem I… |
| 1.1.5a. | (Pod)grupa pojazdów w zakresie norm emisji CO2… |
| 1.1.6. | Nazwa i adres producenta… |
| 1.1.7. | Model… |
| 1.1.8. | Skorygowana rzeczywista masa (kg)… |
| 1.1.9. | Pojazd specjalistyczny (tak/nie)… |
| 1.1.10. | Bezemisyjny pojazd ciężki (tak/nie)… |
| 1.1.11 | Hybrydowy pojazd ciężki z napędem elektrycznym (tak/nie)… |
| 1.1.12 | Pojazd dwupaliwowy (tak/nie)… |
| 1.1.12a. | Odzysk ciepła odpadowego (tak/nie)… |
| 1.1.13. | Kabina sypialna (tak/nie)… |
| 1.1.14. | Struktura hybrydowego pojazdu elektrycznego (np. P1, P2)… |
| 1.1.15. | Struktura pojazdu wyłącznie elektrycznego (np. E2, E3)… |
| 1.1.16. | Doładowywany zewnętrznie (tak/nie)… |
| 1.1.17. | - |
| 1.1.18. | Moc maksymalna ładowania zewnętrznego (kW)… |
| 1.1.19. | Technologia stosowana w pojazdach wyłączona z art. 9… |
| 1.1.20. | Klasa autobusu (np. I, I+II itp.)… |
| 1.1.21. | Łączna liczba zarejestrowanych pasażerów… |
| 1.2. | Dane dotyczące części, oddzielnych zespołów technicznych i układów |
| 1.2.1. | Moc znamionowa silnika (kW)… |
| 1.2.2. | Pojemność silnika (l)… |
| 1.2.3. | Rodzaj paliwa (olej napędowy CI/sprężony gaz ziemny PI/skroplony gaz ziemny PI)… |
| 1.2.4. | Wartości związane z przekładnią (pomiar / wartości standardowe)… |
| 1.2.5. | Typ przekładni (SMT, AMT, APT, brak)… |
| 1.2.6. | Liczba biegów… |
| 1.2.7. | Zwalniacz (tak/nie)… |
| 1.2.8. | Przełożenie osi… |
| 1.2.9. | Średni współczynnik oporu toczenia wszystkich opon pojazdu silnikowego:… |
| 1.2.10a. | Wymiary opon na każdą z osi pojazdu silnikowego… |
| 1.2.10b. | Klasa lub klasy efektywności paliwowej opon zgodnie z rozporządzeniem (UE) 2020/740 na każdą z osi pojazdu silnikowego… |
| 1.2.10c. | Numer certyfikacji opony na każdą z osi pojazdu silnikowego… |
| 1.2.11. | System wyłączania-włączania silnika podczas postojów pojazdu (tak/nie)… |
| 1.2.12. | System eco-roll bez systemu wyłączania-włączania silnika (tak/nie)… |
| 1.2.13. | System eco-roll z systemem wyłączania-włączania silnika (tak/nie)… |
| 1.2.14. | Tempomat przewidujący (tak/nie)… |
| 1.2.15 | Całkowita znamionowa moc napędowa układu lub układów maszyn elektrycznych (kW)… |
| 1.2.16 | Całkowita maksymalna ciągła moc znamionowa układu lub układów maszyn elektrycznych (kW)… |
| 1.2.17 | Całkowita pojemność magazynowa układu magazynowania energii wielokrotnego ładowania (kWh)… |
| 1.2.18 | Użyteczna pojemność magazynowa układu magazynowania energii wielokrotnego ładowania w symulacji (kWh)… |
| 1.3. | Konfiguracja urządzenia pomocniczego |
| 1.3.1. | Technologia pompy wspomagania… |
| 1.3.2. | Układ elektryczny |
| 1.3.2.1 | Technologia alternatora (konwencjonalna, inteligentna, brak alternatora)… |
| 1.3.2.2 | Maksymalna moc alternatora (inteligentny alternator) (kW)… |
| 1.3.2.3 | Zdolność magazynowania energii elektrycznej (inteligentny alternator) (kWh)… |
| 1.3.3. | Układ pneumatyczny |
| 1.3.3.1 | Inteligentny system sprężania… |
| 1.3.3.2 | Inteligentny system regeneracji… |
| 1.3.4. | Układ HVAC |
| 1.3.4.1 | Konfiguracja układu… |
| 1.3.4.2 | Moc pomocniczego urządzenia grzewczego (kW)… |
| 1.3.4.3 | Oszklenie zespolone (tak/nie)… |
| 2. | Emisje CO2 generowane przez pojazd i zużycie paliwa przez pojazd (dla każdego profilu zadań i kombinacji obciążeń, w przypadku hybrydowych pojazdów elektrycznych doładowywanych zewnętrznie, dodatkowo w trybie rozładowania, trybie ładowania podtrzymującego i ważonym) |
| 2.1. | Parametry symulacji |
| 2.1.1 | Profil zadań… |
| 2.1.2 | Masa użyteczna (kg)… |
| 2.1.3 | Informacje o pasażerach |
| 2.1.3.1 | Liczba pasażerów w symulacji …(-) |
| 2.1.3.2 | Masa pasażerów w symulacji …(kg) |
| 2.1.4 | Masa całkowita pojazdu w symulacji (kg)… |
| 2.1.5. | Tryb zewnętrznego ładowania pojazdu (tryb rozładowania, tryb ładowania podtrzymującego, ważony)… |
| 2.2. | Średnia prędkość (km/h)… |
| 2.3. | Wyniki w zakresie zużycia paliwa oraz zużycia energii (według rodzaju paliwa i energii elektrycznej) |
| 2.3.1. | Zużycie paliwa (g/km)… |
| 2.3.2. | Zużycie paliwa (g/t-km)… |
| 2.3.3. | Zużycie paliwa (g/p-km)… |
| 2.3.4. | Zużycie paliwa (g/m3-km)… |
| 2.3.5. | Zużycie paliwa (l/100km)… |
| 2.3.6. | Zużycie paliwa (l/t-km)… |
| 2.3.7. | Zużycie paliwa (l/p-km)… |
| 2.3.8. | Zużycie paliwa (l/m3-km)… |
| 2.3.9. | Zużycie energii (MJ/km, kWh/km)… |
| 2.3.10. | Zużycie energii (MJ/t-km, kWh/t-km)… |
| 2.3.11. | Zużycie energii (MJ/p-km, kWh/p-km)… |
| 2.3.12. | Zużycie energii (MJ/m3-km, kWh/m3-km)… |
| 2.4. | Wyniki w zakresie emisji CO2 (w przypadku każdego profilu zadań i kombinacji obciążenia) |
| 2.4.1. | CO2 (g/km)… |
| 2.4.2. | CO2 (g/t-km)… |
| 2.4.3. | CO2 (g/p-km)… |
| 2.4.5. | CO2 (g/m3-km)… |
| 2.5. | Zasięgi przy zasilaniu energią elektryczną |
| 2.5.1. | Rzeczywisty zasięg z rozładowaniem (km)… |
| 2.5.2. | Równoważny zasięg przy zasilaniu energią elektryczną (km)… |
| 2.5.3. | Zasięg bez generowania emisji CO2 (km)… |
| 2.6. | Wyniki ważone |
| 2.6.1. | Indywidualne emisje CO2 (gCO2/t-km)… |
| 2.6.2. | Indywidualne zużycie energii elektrycznej (kWh/t-km)… |
| 2.6.3. | Średnia wartość masy użytecznej (t)… |
| 2.6.4. | Indywidualne emisje CO2 (gCO2/p-km)… |
| 2.6.5. | Indywidualne zużycie energii elektrycznej (kWh/p-km)… |
| 2.6.6. | Średnia liczba pasażerów (p)… |
| 2.6.7. | Rzeczywisty zasięg z rozładowaniem (km)… |
| 2.6.8. | Równoważny zasięg przy zasilaniu energią elektryczną (km)… |
| 2.6.9. | Zasięg bez generowania emisji CO2 (km)… |
| 3. | Informacje o oprogramowaniu |
| 3.1. | Wersja narzędzia symulacyjnego… |
| 3.2. | Data i godzina symulacji… |
| 3.3. | Skrót kryptograficzny informacji i danych wejściowych narzędzia symulacyjnego dotyczących pojazdu podstawowego (w stosownych przypadkach)… |
| 3.4. | Skrót kryptograficzny dokumentacji producenta pojazdu podstawowego (w stosownych przypadkach)… |
| 3.5. | Skrót kryptograficzny informacji i danych wejściowych narzędzia symulacyjnego dotyczących pojazdu… |
| 3.6. | Skrót kryptograficzny dokumentacji producenta… |
| 3.7. | Skrót kryptograficzny dokumentacji informacyjnej przeznaczonej dla klientów… |
CZĘŚĆ III
Emisje CO2 generowane przez pojazd i zużycie paliwa przez pojazd - dokumentacja pojazdu w przypadku ciężkich autobusów
W przypadku ciężkich autobusów dokumentację pojazdu tworzy się w celu przekazania odpowiednich danych wejściowych, informacji wejściowych i wyników symulacji do kolejnych etapów certyfikacji zgodnie z metodą opisaną w pkt 2 załącznika I.
Dokumentacja pojazdu zawiera co najmniej następujące informacje:
| 1. | W przypadku pojazdu podstawowego: |
| 1.1. | Dane wejściowe i informacje wejściowe określone w załączniku III dla pojazdu podstawowego, z wyjątkiem: odwzorowywania zużycia paliwa; współczynników korekcji silnika WHTC_Urban, WHTC_Rural, WHTC_ Motorway, BFColdHot, CFRegPer; cech charakterystycznych przemiennika momentu obrotowego; map strat dotyczących przekładni, zwalniacza, napędu kątowego i osi; map zużycia mocy elektrycznej przez układy z silnikiem elektrycznym oraz zintegrowane elektryczne układy przeniesienia napędu; parametrów strat energii elektrycznej w przypadku układu magazynowania energii wielokrotnego ładowania. |
| 1.2. | W odniesieniu do każdego profilu zdań i warunku obciążenia: |
| 1.2.1. | Masa całkowita pojazdu w symulacji (kg)… |
| 1.2.2. | Liczba pasażerów w symulacji (-)… |
| 1.2.3. | Zużycie energii (MJ/km)… |
| 1.3. | Informacje o oprogramowaniu |
| 1.3.1. | Wersja narzędzia symulacyjnego… |
| 1.3.2. | Data i godzina symulacji… |
| 1.4. | Skróty kryptograficzne |
| 1.4.1. | Skrót kryptograficzny dokumentacji producenta pojazdu podstawowego… |
| 1.4.2. | Skrót kryptograficzny dokumentacji pojazdu… |
| 2. | W przypadku każdego pojazdu pośredniego, kompletnego lub skompletowanego |
| 2.1. | Dane wejściowe i informacje wejściowe określone w załączniku III dla pojazdu kompletnego lub skompletowanego, które zostały dostarczone przez konkretnego producenta |
| 2.2. | Informacje o oprogramowaniu |
| 2.2.1. | Wersja narzędzia symulacyjnego… |
| 2.2.2. | Data i godzina symulacji… |
| 2.3. | Skróty kryptograficzne |
| 2.3.1. | Skrót kryptograficzny dokumentacji pojazdu…" |
ZAŁĄCZNIK V
W załączniku V wprowadza się następujące zmiany:
| (1) | w pkt 2 nagłówek i akapit pierwszy otrzymują brzmienie: "2. Definicje Do celów niniejszego załącznika stosuje się definicje zawarte w regulaminie nr 49 ONZ (*1), a także - dodatkowo - następujące definicje: (*1) Regulamin nr 49 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące działań, jakie mają zostać podjęte przeciwko emisji zanieczyszczeń gazowych i pyłowych z silników o zapłonie samoczynnym oraz z silników o zapłonie iskrowym stosowanych w pojazdach (Dz.U. L 171 z 24.6.2013, s. 1).";" |
| (2) | w pkt 2 akapit pierwszy dodaje się podpunkty w brzmieniu:
|
| (3) | w pkt 2 akapit drugi otrzymuje brzmienie: "Definicje określone w pkt 3.1.5 i 3.1.6 załącznika 4 do regulaminu nr 49 ONZ nie mają zastosowania."; |
| (4) | pkt 3 akapit pierwszy zdanie pierwsze otrzymuje brzmienie: "Laboratoryjne urządzenia kalibracyjne muszą spełniać wymagania określone w normie IATF 16949, w serii norm ISO 9000 albo w normie ISO/IEC 17025."; |
| (5) | w pkt 3.1.1 akapit pierwszy ppkt 1, 2 i 3 otrzymują brzmienie:
|
| (6) | pkt 3.1.2 otrzymuje brzmienie:
|
| (7) | w pkt 3.1.3 zdanie drugie otrzymuje brzmienie: "W przypadku skrzyni korbowej o układzie otwartym poziom emisji mierzy się i dodaje się go do poziomu emisji z rury wydechowej zgodnie z przepisami pkt 6.10 załącznika 4 do regulaminu nr 49 ONZ."; |
| (8) | pkt 3.1.4 akapit drugi otrzymuje brzmienie: "Zgodnie z niniejszym rozporządzeniem chłodzenie powietrza doładowującego w warunkach laboratoryjnych powinno odbywać się zgodnie z przepisami pkt 6.2 załącznika 4 do regulaminu nr 49 ONZ."; |
| (9) | w pkt 3.1.5 ppkt 6 zdanie pierwsze otrzymuje brzmienie:
|
| (10) | dodaje się punkt w brzmieniu:
|
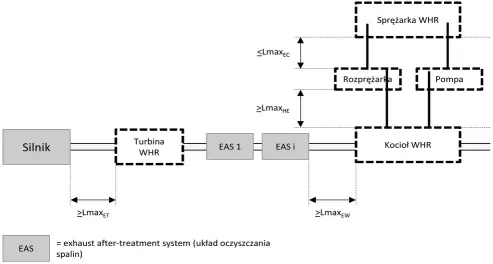
| (11) | w pkt 3.2 w tabeli 1 ostatni wiersz pierwszej kolumny "Gaz ziemny / silnik o zapłonie iskrowym" otrzymuje brzmienie: "Gaz ziemny / silnik o zapłonie iskrowym lub gaz ziemny / silnik Diesla"; |
| (12) | dodaje się punkt w brzmieniu:
|
| (13) | w pkt 3.3 zdanie pierwsze otrzymuje brzmienie: "Olej smarowy wykorzystywany w ramach wszystkich przebiegów badawczych przeprowadzanych zgodnie z przepisami niniejszego załącznika jest olejem dostępnym na rynku, którego producent zatwierdził bez zastrzeżeń jako nadający się do wykorzystania w normalnych warunkach eksploatacyjnych zgodnie z pkt 4.2 załącznika 8 do regulaminu nr 49 ONZ."; |
| (14) | dodaje się punkt w brzmieniu:
|
| (15) | w pkt 3.5 zdanie pierwsze i drugie otrzymują brzmienie: "Urządzenia pomiarowe muszą spełniać wymagania określone w pkt 9 załącznika 4 do regulaminu nr 49 ONZ. Niezależnie od wymagań określonych w pkt 9 załącznika 4 do regulaminu nr 49 ONZ, układy pomiarowe wymienione w tabeli 2 muszą odpowiadać podanym w tej tabeli wartościom granicznym."; |
| (16) | w pkt 3.5 tabela 2 dodaje się wiersze w brzmieniu:
| |||||||||||||||||||||||||||||||||||||||
| (17) | w pkt 3.5 zdanie pierwsze i drugie pod tabelą 2 otrzymują brzmienie: "W przypadku silników dwupaliwowych wartość »maks. kalibracji« mającą zastosowanie do układu pomiaru przepływu masowego paliwa w przypadku paliw ciekłych i gazowych określa się zgodnie z poniższymi przepisami:
|
| (18) | w pkt 3.5.1 i 4 wyrażenie "regulaminu nr 49 EKG ONZ, seria poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ"; |
| (19) | dodaje się punkt w brzmieniu:
|
| (20) | w pkt 4.3.1 wyrażenie "regulaminu nr 49 EKG ONZ, seria poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ"; |
| (21) | w pkt 4.3.2 wyrażenie "regulaminu nr 49 EKG ONZ, seria poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ", w trzech przypadkach; |
| (22) | dodaje się punkt w brzmieniu:
|
| (23) | pkt 4.3.3 otrzymuje brzmienie:
|
| (24) | w pkt 4.3.3.1 wyrażenie "regulaminu nr 49 EKG ONZ, seria poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ"; |
| (25) | dodaje się punkt w brzmieniu:
|
| (26) | pkt 4.3.4 otrzymuje brzmienie:
|
| (27) | w pkt 4.3.4.1 wyrażenie "regulaminu nr 49 EKG ONZ, seria poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ"; |
| (28) | dodaje się punkt w brzmieniu:
|
| (29) | w pkt 4.3.5.1 wyrażenie "regulaminu nr 49 EKG ONZ, seria poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ"; |
| (30) | w pkt 4.3.5.1.1 i 4.3.5.2.1 wyrażenie "regulaminu nr 49 EKG ONZ, seria poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ", w czterech przypadkach; |
| (31) | w pkt 4.3.5.2.2 akapit drugi zdanie pierwsze otrzymuje brzmienie: "Wszystkie zadane docelowe wartości momentu obrotowego przy określonej zadanej docelowej wartości prędkości obrotowej silnika, która przekracza wartość graniczną ustaloną na podstawie wartości momentu obrotowego przy pełnym obciążeniu (obliczoną na podstawie krzywej pełnego obciążenia silnika zarejestrowanej zgodnie z pkt 4.3.1) dla tej konkretnej zadanej wartości docelowej prędkości obrotowej silnika pomniejszonej o 5 % wartości Tmax_overall, zastępuje się pojedynczą zadaną wartością docelową momentu obrotowego przy pełnym obciążeniu dla tej konkretnej zadanej wartości docelowej prędkości obrotowej silnika."; |
| (32) | w pkt 4.3.5.3 wyrażenie "regulaminu nr 49 EKG ONZ, seria poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ", w trzech przypadkach; |
| (33) | w pkt 4.3.5.3 ppkt 4 zdanie drugie otrzymuje brzmienie: "Emisje cząstek stałych, emisje metanu i amoniaku nie muszą być monitorowane w trakcie przebiegu badawczego cyklu FCMC."; |
| (34) | dodaje się punkt w brzmieniu:
|
| (35) | w pkt 4.3.5.4 akapit pierwszy i drugi tekst "regulaminu nr 49 EKG ONZ, seria poprawek 06" otrzymuje brzmienie: "regulaminu nr 49 ONZ"; |
| (36) | pkt 4.3.5.4 akapit trzeci otrzymuje brzmienie: "Krzywą pełnego obciążenia silnika dla silnika macierzystego CO2należącego do rodziny silników CO2zarejestrowaną zgodnie z pkt 4.3.1 wykorzystuje się do denormalizacji wartości odniesienia trybu 9 przeprowadzonej zgodnie z pkt 7.4.6, 7.4.7 i 7.4.8 załącznika 4 do regulaminu nr 49 ONZ."; |
| (37) | w pkt 4.3.5.5 akapit czwarty ppkt 1 zdanie drugie otrzymuje brzmienie: "W ciągu kolejnych 30 ± 1 s silnik kontroluje się w następujący sposób:"; |
| (38) | w pkt 4.3.5.5 akapit czwarty ppkt 3 otrzymuje brzmienie:
|
| (39) | w pkt 4.3.5.6 lit. wyrażenie "regulaminu nr 49 EKG ONZ, seria poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ"; |
| (40) | w pkt 4.3.5.6.2 akapit drugi ppkt 2 i 3 otrzymują brzmienie:
|
| (41) | pkt 4.3.5.6.3 akapit drugi otrzymuje brzmienie: "Jednostkowe emisje masowe przy danych wartościach prędkości obrotowej silnika i momentu obrotowego mierzone w trakcie cyklu FCMC określa się jako średnią wartość z okresu pomiaru 30 ± 1 sekund wyznaczoną zgodnie z pkt 4.3.5.5 ppkt 1."; |
| (42) | w pkt 4.3.5.6.3 i 4.3.5.7.1 wyrażenie "regulaminu nr 49 EKG ONZ zmienionego serią poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ", w pięciu przypadkach; |
| (43) | pkt 4.3.5.7.2 otrzymuje brzmienie:
|
| (44) | w pkt 5.1 wyrażenie "regulaminu nr 49 EKG ONZ zmienionego serią poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ"; |
| (45) | dodaje się punkt w brzmieniu:
|
| (46) | dodaje się punkt w brzmieniu:
|
| (47) | pkt 5.3.3 otrzymuje brzmienie:
|
| (48) | pkt 5.3.3.1 w tabeli 4 pierwsza kolumna "Gaz ziemny / silnik o zapłonie iskrowym" otrzymuje brzmienie: "Gaz ziemny / silnik o zapłonie iskrowym lub gaz ziemny / silnik Diesla"; |
| (49) | dodaje się punkt w brzmieniu:
|
| (50) | w pkt 5.4 wyrażenie "regulaminu nr 49 EKG ONZ zmienionego serią poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ", w sześciu przypadkach; |
| (51) | dodaje się punkty w brzmieniu:
|

| (52) | pkt 6.1.4 otrzymuje brzmienie:
|
| (53) | dodaje się punkty w brzmieniu:
|
| (54) | dodaje się punkt w brzmieniu:
|
| (55) | dodaje się punkt w brzmieniu:
|
| (56) | dodaje się punkt w brzmieniu:
|
| (57) | dodaje się punkt w brzmieniu:
|
| (58) | dodaje się punkt w brzmieniu:
|
| (59) | pkt 6.1.17 otrzymuje brzmienie:
|
| (60) | dodaje się punkty w brzmieniu:
|
| (61) | w dodatku 2 część 1 dodaje się punkty w brzmieniu:
|
| (62) | w dodatku 2 część 1 dodaje się punkt w brzmieniu:
|
| (63) | w dodatku 2 część 1 pkt 3.2.1.11 otrzymuje brzmienie:
|
| (64) | w dodatku 2 część 1 pkt 3.2.2.2.1 otrzymuje brzmienie:
|
| (65) | w dodatku 2 część 1 pkt 3.2.4.2 otrzymuje brzmienie:
|
| (66) | w dodatku 2 część 1 pkt 3.2.12.1.1 otrzymuje brzmienie:
|
| (67) | w dodatku 2 część 1 pkt 3.2.12.2.7 otrzymuje brzmienie:
|
| (68) | w dodatku 2 część 1 uchyla się pkt 3.2.12.2.7.0.1-3.2.12.2.8.7; |
| (69) | w dodatku 2 część 1 pkt 3.2.17 otrzymuje brzmienie:
|
| (70) | w dodatku 2 część 1 pkt 3.5.5 otrzymuje brzmienie:
|
| (71) | w dodatku 2 część 1 pkt 3.5.5.1-3.5.5.8 druga kolumna koniec tekstu dodaje się przypis do tabeli "(9)"; |
| (72) | w dodatku 2 część 1 dodaje się punkt w brzmieniu:
|
| (73) | w dodatku 2 część 1 dodaje się punkty w brzmieniu:
|
| (74) | w dodatku 2 część 1 dodaje się przypisy do tabeli w brzmieniu:
|
| (75) | w dodatku 2, dodatek do dokumentu informacyjnego, pkt 4 otrzymuje brzmienie:
(*2) W przypadku silników dwupaliwowych należy oddzielnie podać wartości dla każdego rodzaju paliwa i każdego trybu pracy";" |
| (76) | w dodatku 2, dodatek do dokumentu informacyjnego, tabela 1 oba wiersze, wyrażenie "regulaminu nr 49 EKG ONZ zmienionego serią poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ"; |
| (77) | w dodatku 2, dodatek do dokumentu informacyjnego, pkt 6.1 zdanie pierwsze otrzymuje brzmienie: "Testowe prędkości obrotowe silnika stosowane w badaniu emisji (w przypadku silników dwupaliwowych pracujących w trybie dwupaliwowym) zgodnie z załącznikiem 4 do regulaminu nr 49 ONZ(1)"; |
| (78) | w dodatku 2, dodatek do dokumentu informacyjnego, pkt 6.2 otrzymuje brzmienie:
(*3) Regulamin nr 85 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące homologacji silników spalinowych lub elektrycznych układów napędowych przeznaczonych do napędzania pojazdów silnikowych kategorii M i N w zakresie pomiaru mocy netto oraz maksymalnej mocy 30-minutowej elektrycznych układów napędowych (Dz.U. L 323 z 7.11.2014, s. 52)";" |
| (79) | w dodatku 3 pkt 1 otrzymuje brzmienie:
|
| (80) | w dodatku 3 pkt 1.5 otrzymuje brzmienie:
|
| (81) | w dodatku 3 dodaje się punkty w brzmieniu:
|
| (82) | w dodatku 3 pkt 1.7.3 otrzymuje brzmienie:
|
| (83) | w dodatku 3 pkt 1.8.2 wyrażenie "regulaminu nr 49 EKG ONZ zmienionego serią poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ"; |
| (84) | w dodatku 3 dodaje się punkty w brzmieniu:
|
| (85) | w dodatku 4 pkt 5.3 lit. b) otrzymuje brzmienie:
|
| (86) | w dodatku 4 pkt 5.4, 5.5 i 5.6 otrzymują brzmienie:
|
| (87) | w dodatku 4 pkt 5.7 wyrażenie "regulaminu nr 49 EKG ONZ zmienionego serią poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ", w dwóch przypadkach; |
| (88) | w dodatku 4 dodaje się pkt w brzmieniu:
|
| (89) | w dodatku 4 pkt 7.3 otrzymuje brzmienie:
|
| (90) | w dodatku 4 dodaje się pkt w brzmieniu:
|
| (91) | w dodatku 4 dodaje się punkty w brzmieniu:
|
| (92) | w dodatku 4 pkt 8 akapit drugi otrzymuje brzmienie: "W przypadku silników zasilanych gazem i silników dwupaliwowych wartości graniczne oceny zgodności pojedynczego badanego silnika są wartością docelową określoną zgodnie z pkt 6, która wynosi +5 %."; |
| (93) | w dodatku 4 pkt 9.1 otrzymuje brzmienie:
|
| (94) | w dodatku 4 pkt 9.3 lit. a) i b) wyrażenie "regulaminu nr 49 EKG ONZ zmienionego serią poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ"; |
| (95) | w dodatku 5 pkt 1 akapit pierwszy ppkt (ii) wyrażenie "regulaminu nr 49 EKG ONZ zmienionego serią poprawek 06" zastępuje się wyrażeniem: "regulaminu nr 49 ONZ"; |
| (96) | w dodatku 6 pkt 1.4 i 1.4.1 otrzymują brzmienie:
|
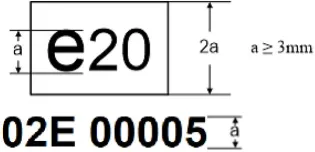
| (97) | w dodatku 6 pkt 1.5.1 otrzymuje brzmienie:
|
| (98) | w dodatku 6 pkt 2.1 otrzymuje brzmienie:
|
| (99) | w dodatku 7 pkt 3 tabela 1 otrzymuje brzmienie: "Tabela 1 Parametry wejściowe »Engine/General«
|
| (100) | w dodatku 7 pkt 3 dodaje się tabelę w brzmieniu: "Tabela 1a Parametry wejściowe »Engine« według rodzaju paliwa
|
| (101) | w dodatku 7 pkt 3 tabela 3 otrzymuje brzmienie: "Tabela 3 Parametry wejściowe »Engine/FuelMap« dla każdego punktu siatki mapy charakterystyki paliwa (dla każdego rodzaju paliwa wymagana jedna mapa)
|
| (102) | w dodatku 8 pkt 3.3 dodaje się zdanie w brzmieniu: "Uzyskane w wyniku ekstrapolacji wartości zużycia paliwa poniżej zmierzonych wartości przy pełnym obciążeniu i odpowiedniej prędkości obrotowej silnika ustawia się jako wartości zmierzone przy pełnym obciążeniu."; |
| (103) | w dodatku 8 dodaje się pkt w brzmieniu:
|
| (104) | w dodatku 8 dodaje się punkty w brzmieniu:
|
(*1) Regulamin nr 49 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące działań, jakie mają zostać podjęte przeciwko emisji zanieczyszczeń gazowych i pyłowych z silników o zapłonie samoczynnym oraz z silników o zapłonie iskrowym stosowanych w pojazdach (Dz.U. L 171 z 24.6.2013, s. 1).";
(*2) W przypadku silników dwupaliwowych należy oddzielnie podać wartości dla każdego rodzaju paliwa i każdego trybu pracy";
(*3) Regulamin nr 85 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące homologacji silników spalinowych lub elektrycznych układów napędowych przeznaczonych do napędzania pojazdów silnikowych kategorii M i N w zakresie pomiaru mocy netto oraz maksymalnej mocy 30-minutowej elektrycznych układów napędowych (Dz.U. L 323 z 7.11.2014, s. 52)";"
ZAŁĄCZNIK VI
W załączniku VI wprowadza się następujące zmiany:
| (1) | w pkt 2 ppkt 16 dodaje się zdanie w brzmieniu: "W niektórych przypadkach stały poślizg w przekładniach o jednym przełożeniu ma na celu np. zapobieganie drganiom;"; |
| (2) | w pkt 2 ppkt 17 zdanie pierwsze otrzymuje brzmienie: "»sprzęgło rozruchowe« oznacza sprzęgło, które pozwala dostosować prędkość obrotową silnika do prędkości obrotowej kół napędzających w momencie uruchomienia pojazdu."; |
| (3) | w pkt 2 ppkt 20 dodaje się zdanie w brzmieniu: "W niektórych przypadkach stały poślizg w przekładniach o jednym przełożeniu ma na celu np. zapobieganie drganiom;"; |
| (4) | pkt 2 ppkt 22 i 23 otrzymują brzmienie:
|
| (5) | w pkt 2 dodaje się podpunkty w brzmieniu:
|
| (6) | w pkt 3.1 akapit pierwszy wzór otrzymuje brzmienie: "T l,in (n in ,T in ,gear) = T l,in,min_loss + f T × T in + f loss_corr × T in + T l,in,min_el + f el_corr × T in + f loss tcc × T in "; |
| (7) | w pkt 3.1 akapit czwarty po wzorze dodaje się tekst w brzmieniu: "Współczynnik korekcji strat w poślizgowym sprzęgle blokady wyposażonym w przemiennik momentu obrotowego zdefiniowanym w pkt 2 ppkt 16 lub sprzęgle poślizgowym po stronie wejściowej zdefiniowanym w pkt 2 ppkt 20 oblicza się w następujący sposób:  |
| (8) | w pkt 3.1 dodaje się uwagi objaśniające w brzmieniu:
|
| (9) | w pkt 3.1.2.2 zdanie drugie otrzymuje brzmienie: "Pomiary należy przeprowadzić z wykorzystaniem tych samych wartości prędkości i tych samych temperatur urządzenia pomiarowego ± 3 K wykorzystywanych do badania."; |
| (10) | pkt 3.1.2.4.2 otrzymuje brzmienie:
|
| (11) | w pkt 3.1.2.4.4 zdanie drugie liczbę "60" zastępuje się liczbą "100"; |
| (12) | pkt 3.1.2.5.5 akapit trzeci ppkt 2 otrzymuje brzmienie:
|
| (13) | pkt 3.1.3.1 otrzymuje brzmienie:
|
| (14) | w pkt 3.1.3.5 zdanie drugie odniesienie "załączniku VII" zastępuje się odniesieniem "załączniku IX"; |
| (15) | w pkt 3.1.4 zdanie pierwsze "ISO/TF" zastępuje się "IATF"; |
| (16) | pkt 3.1.6.2 otrzymuje brzmienie:
|
| (17) | w pkt 3.1.6.3.3 zdanie pierwsze otrzymuje brzmienie: "W odniesieniu do każdej wartości prędkości wymagany jest co najmniej 5-sekundowy czas stabilizacji w granicach wartości temperatury określonych w pkt 3.1.2.5."; |
| (18) | pkt 3.1.6.3.4 otrzymuje brzmienie:
|
| (19) | pkt 3.1.7.1 otrzymuje brzmienie:
|
| (20) | w pkt 3.1.7.3 akapit pierwszy wzór pierwszy otrzymuje brzmienie: "Tloss = T1,in(nin, Tin,gear)"; |
| (21) | w pkt 3.1.8 rys. 1 nagłówek otrzymuje brzmienie: "Przykład konfiguracji badania A dla wariantu 1"; |
| (22) | w pkt 3.1.8 rys. 2 nagłówek otrzymuje brzmienie: "Przykład konfiguracji badania B dla wariantu 1"; |
| (23) | w pkt 3.1.8 dodaje się tekst w brzmieniu: "Konfiguracja badania przekładni ze zintegrowanym mechanizmem różnicowym napędu na przednie koła obejmuje hamulec dynamometryczny umieszczony na wejściowej stronie przekładni oraz co najmniej jeden hamulec dynamometryczny na wyjściowej stronie (stronach) przekładni. Urządzenia do mierzenia momentu obrotowego umieszcza się po stronie wejściowej i po stronie wyjściowej (stronach wyjściowych) przekładni. W przypadku konfiguracji badania obejmujących tylko jeden hamulec dynamometryczny umieszczony na wyjściowej stronie swobodnie obracający się koniec przekładni ze zintegrowanym mechanizmem różnicowym musi być obrotowo zablokowany względem drugiego końca po stronie wyjściowej (np. za pomocą włączonego zamka różnicowego lub za pomocą innego mechanicznego zamka różnicowego stosowanego wyłącznie do celów pomiarowych). Zakres wartości współczynnika ipara dla maksymalnego wpływu niepożądanych obciążeń na dany czujnik momentu obrotowego jest wyznaczony zgodnie z opisanymi powyżej przypadkami (A/B/C). Rysunek 2A Przykład konfiguracji badania A dla wariantu 1 w przypadku przekładni wyposażonej w zintegrowany mechanizm różnicowy (np. napęd na przednie koła) 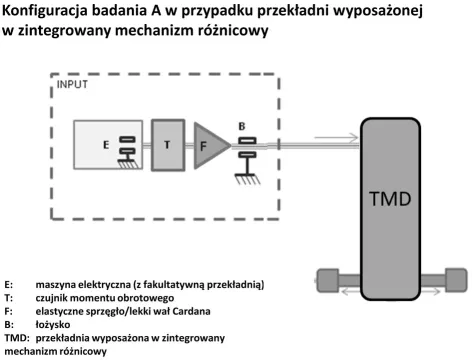 Rysunek 2B Przykład konfiguracji badania B dla wariantu 1 w przypadku przekładni wyposażonej w zintegrowany mechanizm różnicowy (np. napęd na przednie koła) 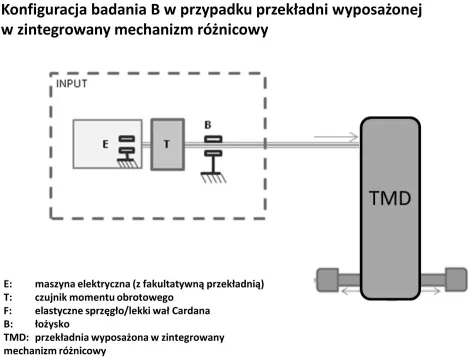 Producent może dostosować konfiguracje badania A i B na podstawie właściwej oceny technicznej i w porozumieniu z organem udzielającym homologacji, np. w przypadku praktycznych przyczyn związanych z konfiguracją badania. W przypadku takiego odchylenia w sprawozdaniu z badania należy wyraźnie określić przyczynę i alternatywną konfigurację. Dopuszcza się przeprowadzenie badania bez oddzielnego łożyska na urządzeniu pomiarowym po wejściowej/wyjściowej stronie przekładni, jeżeli wał przekładni, na którym mierzony jest moment obrotowy, jest w obudowie przekładni podparty dwoma łożyskami, które są w stanie przyjąć siły radialną i osiową wywierane przez zespół kół zębatych. Rysunek 2C Przykład, w którym siły w przekładni są izolowane i nie są izolowane od strony wejściowej: 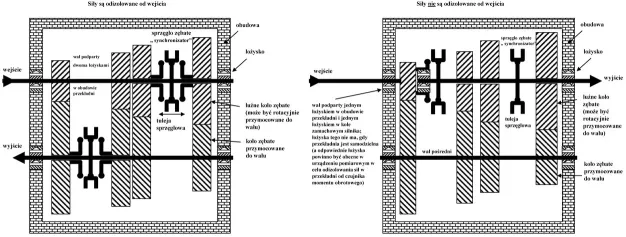 |
| (24) | w pkt 3.2 akapit trzeci wzór otrzymuje brzmienie: "T l,in (n in ,T in ,gear) = T l,in,min_loss + f Tlino × T in + T l,in,min_el + f el_corr × T in + f loss tcc × T in "; |
| (25) | pkt 3.2 akapit piąty otrzymuje brzmienie: "Współczynnik korekcji dla zależnych od momentu obrotowego strat momentu obrotowego w układach elektrycznych fel_corr , stratę momentu obrotowego na wale wejściowym przekładni spowodowaną poborem mocy przez elektryczne urządzenie pomocnicze służące do obsługi przekładni Tl,in,el oraz współczynnik korekcji straty floss_tcc w przypadku poślizgowego sprzęgła blokady wyposażonego w przemiennik momentu obrotowego zdefiniowanego w pkt 2 ppkt 16 lub poślizgowego sprzęgła po stronie wejściowej zdefiniowanego w pkt 2 ppkt 20 oblicza się zgodnie z pkt 3.1."; |
| (26) | pkt 3.3.3.4 akapit drugi ppkt 2 otrzymuje brzmienie:
|
| (27) | pkt 3.3.4 akapit drugi otrzymuje brzmienie: "Czujniki momentu obrotowego montuje się po stronach wejściowej i wyjściowej przekładni."; |
| (28) | pkt 3.3.6.2 i 3.3.6.3 otrzymują brzmienie:
|
| (29) | pkt 3.3.6.4.2 otrzymuje brzmienie:
|
| (30) | pkt 3.3.6.4.3 zdanie pierwsze otrzymuje brzmienie: "W odniesieniu do każdej wartości prędkości i momentu obrotowego wymagany jest co najmniej 5-sekundowy czas stabilizacji w granicach wartości temperatury określonych w pkt 3.3.3."; |
| (31) | dodaje się punkt w brzmieniu:
|
| (32) | pkt 3.3.8.1 otrzymuje brzmienie:
|
| (33) | w pkt 3.3.8.2 zdanie drugie wartość "0,5 %" zastępuje się wartością "1,0 %"; |
| (34) | pkt 3.3.8.3 otrzymuje brzmienie:
|


| (35) | w pkt 3.3.9 rys. 3 nagłówek otrzymuje brzmienie: "Przykład konfiguracji badania A dla wariantu 3"; |
| (36) | w pkt 3.3.9 rys. 4 nagłówek otrzymuje brzmienie: "Przykład konfiguracji badania B dla wariantu 3"; |
| (37) | w pkt 3.3.9 dodaje się tekst w brzmieniu: "Konfiguracja badania przekładni ze zintegrowanym mechanizmem różnicowym napędu na przednie koła obejmuje hamulec dynamometryczny umieszczony na wejściowej stronie przekładni oraz co najmniej jeden hamulec dynamometryczny na wyjściowej stronie (stronach) przekładni. Urządzenia do mierzenia momentu obrotowego umieszcza się po stronie wejściowej i po stronie wyjściowej (stronach wyjściowych) przekładni. W przypadku konfiguracji badania obejmujących tylko jeden hamulec dynamometryczny umieszczony na wyjściowej stronie swobodnie obracający się koniec przekładni ze zintegrowanym mechanizmem różnicowym musi być obrotowo zablokowany względem drugiego końca po stronie wyjściowej (np. za pomocą włączonego zamka różnicowego lub za pomocą innego mechanicznego zamka różnicowego stosowanego wyłącznie do celów pomiarowych). Zakres wartości współczynnika ipara dla maksymalnego wpływu niepożądanych obciążeń na konkretne czujniki momentu obrotowego jest wyznaczony zgodnie z opisanymi powyżej przypadkami (A/B/C). Rysunek 5 Przykład konfiguracji badania A w przypadku przekładni wyposażonej w zintegrowany mechanizm różnicowy (np. napęd na przednie koła) 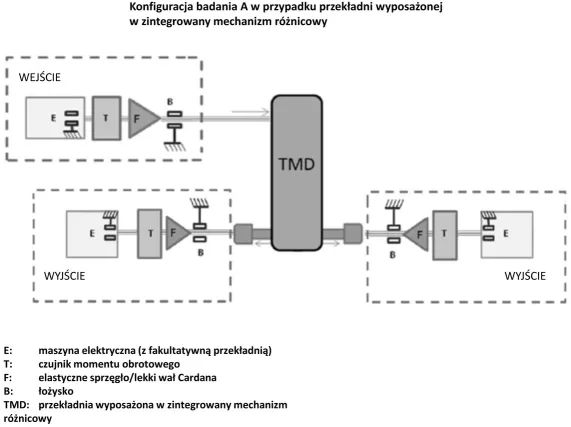 Rysunek 6 Przykład konfiguracji badania B w przypadku przekładni wyposażonej w zintegrowany mechanizm różnicowy (np. napęd na przednie koła) 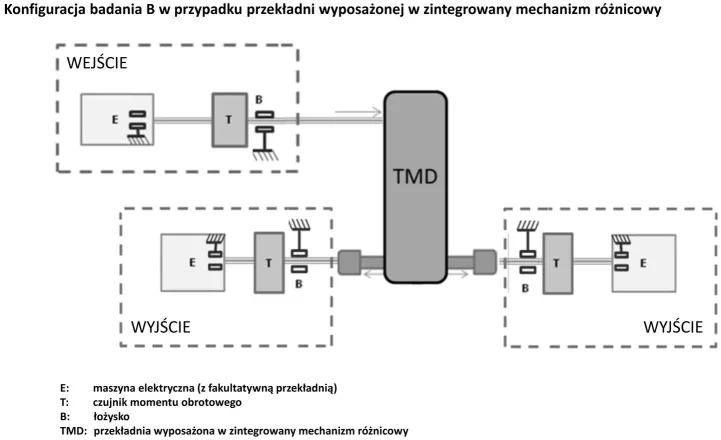 W przypadku hamulca dynamometrycznego na każdym wale zdawczym, całkowitą niepewność straty momentu obrotowego (UT,loss ) oblicza się według następującego wzoru:  Producent może dostosować konfiguracje badania A i B na podstawie właściwej oceny technicznej i w porozumieniu z organem udzielającym homologacji, np. w przypadku praktycznych przyczyn związanych z konfiguracją badania. W przypadku takiego odchylenia w sprawozdaniu z badania należy wyraźnie określić przyczynę i alternatywną konfigurację. Dopuszcza się przeprowadzenie badania bez oddzielnego łożyska na urządzeniu pomiarowym po wejściowej/wyjściowej stronie przekładni, jeżeli wał przekładni, na którym mierzony jest moment obrotowy, jest w obudowie przekładni podparty dwoma łożyskami, które są w stanie przyjąć siły radialną i osiową wywierane przez zespół kół zębatych (zob. rys. 2C w pkt 3.1.8)."; |
| (38) | w pkt 3.4 zdanie pierwsze otrzymuje brzmienie: "W odniesieniu do każdego biegu określa się mapę strat momentu obrotowego obejmującą określone wartości prędkości wejściowej i wejściowego momentu obrotowego, uwzględniając jeden określony wariant badania lub standardowe wartości straty momentu obrotowego."; |
| (39) | pkt 3.4.1 otrzymuje brzmienie: "Jeżeli najwyższa badana prędkość wejściowa była ostatnią wartością prędkości poniżej określonej maksymalnej dozwolonej prędkości przekładni, należy zastosować ekstrapolację straty momentu obrotowego do prędkości maksymalnej z regresją liniową opartą na dwóch wartościach mierzonej ostatnio prędkości."; |
| (40) | w pkt 3.4.2 zdanie pierwsze otrzymuje brzmienie: "W przypadkach gdy najwyższy badany wejściowy moment obrotowy stanowił ostatnią wartość pomiaru momentu obrotowego poniżej określonego maksymalnego dozwolonego momentu obrotowego przekładni, należy zastosować ekstrapolację straty momentu obrotowego do maksymalnego momentu obrotowego z regresją liniowa opartą na dwóch wartościach mierzonego ostatnio momentu obrotowego w odniesieniu do odpowiedniej wartości prędkości."; |
| (41) | pkt 3.4.5 otrzymuje brzmienie:
|
| (42) | pkt 3.4.8 otrzymuje brzmienie:
|
| (43) | pkt 4 otrzymuje brzmienie:
|
| (44) | w pkt 4.1.6 termin "ISO/TS" zastępuje się terminem "IATF"; |
| (45) | w pkt 4.1.7.2.5 zdanie pierwsze otrzymuje brzmienie: "W odniesieniu do każdej wartości wymagany jest co najmniej 3-sekundowy czas stabilizacji w granicach wartości temperatury określonych w pkt 4.1.2."; |
| (46) | pkt 4.1.7.2.6 otrzymuje brzmienie:
|
| (47) | w pkt 4.2.7.2.5 zdanie pierwsze otrzymuje brzmienie: "W odniesieniu do każdej wartości wymagany jest co najmniej 5-sekundowy czas stabilizacji w granicach wartości temperatury określonych w pkt 4.2.2."; |
| (48) | pkt 4.2.7.2.6 otrzymuje brzmienie:
|
| (49) | w pkt 5 nagłówek otrzymuje brzmienie: "Procedura badania innych części przenoszących moment obrotowy (OTTC)"; |
| (50) | w pkt 5.1 tabela 2 wiersz trzeci otrzymuje brzmienie:
|
| (51) | pkt 6 otrzymuje brzmienie: "6. Procedura badania dodatkowych części układu napędowego (ADC) / części układu napędowego z pojedynczym wskaźnikiem prędkości (np. napęd kątowy)
|
| (52) | w pkt 7.1 zdanie drugie otrzymuje brzmienie: "Procedury dotyczące zgodności certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa muszą być zgodne z ustaleniami dotyczącymi zgodności produkcji określonymi w art. 31 rozporządzenia (UE) 2018/858."; |
| (53) | pkt 8.1.2.2.1 otrzymuje brzmienie:
|
| (54) | pkt 8.1.2.2.2 ppkt 2 otrzymuje brzmienie:
|
| (55) | pkt 8.1.2.3 otrzymuje brzmienie:
|
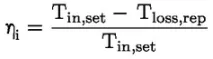
| (56) | w pkt 8.1.3 dodaje się tekst w brzmieniu: "Sprawność przekładni z homologacją ηA,TA oblicza się jako średnią arytmetyczną sprawności z 18 punktów pracy podczas certyfikacji na podstawie wzorów podanych w pkt 8.1.2.3 i 8.1.2.4, określonych zgodnie z wymaganiami zawartymi w pkt 8.1.2.2.2."; |
| (57) | w dodatku 2 część 1 pkt 1.18 formuła wprowadzająca otrzymuje brzmienie: "Przełożenia [-] i maksymalny wejściowy moment obrotowy [Nm], maksymalna moc wejściowa (kW) i maksymalna prędkość wejściowa [obr./min] w przypadku najwyżej ocenionej wersji na członka rodziny (gdy ten sam członek rodziny jest sprzedawany pod różnymi nazwami handlowymi)."; |
| (58) | w dodatku 2 część 1 dodaje się punkt w brzmieniu:
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| (59) | w dodatku 7 pkt 1.4 akapit pierwszy otrzymuje brzmienie: "W pobliżu prostokąta na znaku certyfikującym znajduje się również »podstawowy numer homologacji« określony w sekcji 4 numeru homologacji typu, o którym mowa w załączniku IV do rozporządzenia (UE) 2020/683, poprzedzony dwiema cyframi odpowiadającymi kolejnemu numerowi przyporządkowanemu najnowszej zmianie technicznej wprowadzonej do niniejszego rozporządzenia lub poprzedzony znakiem alfabetycznym oznaczającym część, której udzielono certyfikacji."; |
| (60) | w dodatku 7 pkt 1.4 akapit drugi liczbę "00" zastępuje się liczbą "02"; |
| (61) | w dodatku 7 pkt 1.5 otrzymuje brzmienie:
|
| (62) | w dodatku 7 pkt 2.1 otrzymuje brzmienie:
|
| (63) | w dodatku 8 dodaje się tekst w brzmieniu: "W przypadku przekładni ze zintegrowanym mechanizmem różnicowym, zintegrowany mechanizm różnicowy należy traktować jako napęd kątowy. Z tego względu do obliczenia T l,in należy zastosować powyższe równania na Tadd0 , Tadd1000 i fTadd "; |
| (64) | dodatek 10 otrzymuje brzmienie: "Dodatek 10 Standardowe wartości strat momentu obrotowego - inne części przenoszące moment obrotowy Obliczanie standardowej wartości straty momentu obrotowego w przypadku innych części przenoszących moment obrotowy W odniesieniu do głównych zwalniaczy hydrodynamicznych (olej lub woda) wyposażonych w funkcję uruchamiania pojazdu, opór tarcia zwalniacza oblicza się na podstawie poniższego równania.  W odniesieniu do innych zwalniaczy hydrodynamicznych (olej lub woda), opór tarcia zwalniacza oblicza się na podstawie poniższego równania.  W odniesieniu do zwalniaczy magnetycznych (stały lub elektromagnetyczny), opór tarcia zwalniacza oblicza się na podstawie następującego równania:  gdzie:
|
| (65) | w dodatku 11 nagłówek otrzymuje brzmienie: "Standardowe wartości strat momentu obrotowego - przekładniowy napęd kątowy lub część układu napędowego z pojedynczym wskaźnikiem prędkości"; |
| (66) | w dodatku 11 akapit pierwszy zdanie wprowadzające otrzymuje brzmienie: "Zgodnie ze standardowymi wartościami strat w przypadku połączenia przekładni z przekładniowym napędem kątowym przedstawionymi w dodatku 8 standardowe straty momentu obrotowego na przekładniowym napędzie kątowym lub części układu napędowego z pojedynczym wskaźnikiem prędkości bez przekładni oblicza się na podstawie następującego równania:"; |
| (67) | w dodatku 12 tabela 1 kolumna piąta wiersz siódmy tekst otrzymuje brzmienie: "Dopuszczalne wartości(1): »SMT«, »AMT«, »APT-S«, »APT-P«, »APT-N«, »IHPC Type 1«"; |
| (68) | w dodatku 12 tabela 1 dodaje się wiersze w brzmieniu:
|
| (69) | w dodatku 12 tabela 2 kolumna piąta wiersz trzeci dodaje się następujący opis: "W przypadku przekładni wyposażonej w mechanizm różnicowy, należy podać jedynie przełożenie przekładni bez uwzględniania przełożenia osi."; |
| (70) | w dodatku 12 nagłówek tabeli 6 otrzymuje brzmienie: "Parametry wejściowe »ADC/General« (wymagane tylko jeżeli część ma zastosowanie)"; |
| (71) | w dodatku 12 nagłówek tabeli 7 otrzymuje brzmienie: "Parametry wejściowe »ADC/LossMap« dla każdego punktu siatki mapy strat (wymagane tylko jeżeli część ma zastosowanie)". |
ZAŁĄCZNIK VII
W załączniku VII wprowadza się następujące zmiany:
| (1) | pkt 2 ppkt 2 zdanie ostatnie otrzymuje brzmienie: "Zazwyczaj pierwszą przekładnię redukcyjną stanowi zespół stożkowych kół zębatych, natomiast druga przekładania redukcyjna jest zespołem czołowych kół zębatych (lub zespołem kół zębatych śrubowych) przesuniętych w pionie bezpośrednio przy kołach."; |
| (2) | pkt 3 akapit pierwszy otrzymuje brzmienie: "Na potrzeby weryfikacji strat na osi koła zębate osi i wszystkie łożyska muszą być nowe, natomiast łożyska końcowe kół mogą być używane i wykorzystywane do wielokrotnych pomiarów."; |
| (3) | pkt 4.1.3 zdanie ostatnie otrzymuje brzmienie: "W przypadku badania różnych wariantów przełożeń przy pojedynczej obudowie osi należy wymienić olej na potrzeby każdego pojedynczego pomiaru dotyczącego całego systemu osi."; |
| (4) | pkt 4.2.3 akapit pierwszy zdanie ostatnie otrzymuje brzmienie: "W przypadku konfiguracji typu A obejmujących tylko jeden hamulec dynamometryczny umieszczony na wyjściowej stronie swobodnie obracający się koniec osi musi być obrotowo zablokowany względem drugiego końca po stronie wyjściowej (np. za pomocą włączonego zamka różnicowego lub za pomocą innego mechanicznego zamka różnicowego stosowanego wyłącznie do celów pomiarowych)."; |
| (5) | pkt 4.2.3 akapit trzeci zdanie ostatnie otrzymuje brzmienie: "Na Rysunku 1 pokazano przykład konfiguracji badania typu A z dwoma hamulcami dynamometrycznymi."; |
| (6) | w pkt 4.3.1 zdanie pierwsze termin "ISO/TS" zastępuje się terminem "IATF"; |
| (7) | w pkt 4.3.2 ppkt (v) dodaje się tekst w brzmieniu: "[°C] (fakultatywnie)"; |
| (8) | pkt 4.3.3 otrzymuje brzmienie:
|
| (9) | pkt 4.3.3.2 otrzymuje brzmienie:
|
| (10) | w pkt 4.3.4.2 zdanie pierwsze otrzymuje brzmienie: "Maksymalną badaną prędkość obrotową kół mierzy się, uwzględniając najmniejszą stosowaną średnicę opon przy prędkości pojazdu wynoszącej 90 km/h dla średnich i ciężkich samochodów ciężarowych i przy prędkości 110 km/h dla ciężkich autobusów."; |
| (11) | pkt 4.3.5 otrzymuje brzmienie:
|
| (12) | w pkt 4.4.1 zdanie pierwsze otrzymuje brzmienie: "W odniesieniu do każdego przedziału prędkości należy zmierzyć stratę momentu obrotowego, począwszy od najniższej wartości momentu obrotowego rosnąco aż do najwyższej a następnie malejąco do najniższej."; |
| (13) | pkt 4.4.2 otrzymuje brzmienie:
|
| (14) | w pkt 4.4.6 akapit drugi skreśla się wzór pierwszy; |
| (15) | w ppkt 4.4.6 akapit drugi, w uwadze objaśniającej dotyczącej "ΔK", tekst "ΔK = 15K" otrzymuje brzmienie "ΔK = 15"; |
| (16) | pkt 4.4.7 otrzymuje brzmienie:
|

| (17) | pkt 4.4.8.2 otrzymuje brzmienie:
|
| (18) | w pkt 5.1 zdanie ostatnie otrzymuje brzmienie: "Procedury dotyczące zgodności certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa muszą być zgodne z procedurami określonymi w art. 31 rozporządzenia (UE) 2018/858."; |
| (19) | w pkt 6.2.2 ppkt (iii) dodaje się zdanie w brzmieniu: "Jeżeli wybrany punkt znajduje się pośrodku między dwoma zatwierdzonymi punktami, wykorzystuje się wyższy punkt."; |
| (20) | pkt 6.2.5 zdanie ostatnie otrzymuje brzmienie: "Można to zrobić przed procedurą docierania lub po jej zakończeniu zgodnie z pkt 3.1 lub za pomocą ekstrapolacji wszystkich wartości mapy momentu obrotowego dla każdego poziomu prędkości malejąco do wartości 0 Nm. Ekstrapolacja musi być ekstrapolacją liniową lub wielomianową drugiego rzędu, w zależności od tego, które odchylenie standardowe jest niższe."; |
| (21) | w pkt 6.3.1 dodaje się tekst w brzmieniu: "W przypadku pojedynczej osi portalowej o różnej długości dwóch wałów zdawczych dopuszcza się również konfigurację badania z dwiema maszynami elektrycznymi i dwoma czujnikami momentu obrotowego przy każdym wyjściu. W związku z tym oba wały zdawcze są napędzane synchronicznie w kierunku jazdy. Końcowy opór tarcia jest reprezentowany przez sumę obu wyjściowych momentów obrotowych."; |
| (22) | w pkt 6.4.1 tabela 2 otrzymuje brzmienie: "Tabela 2
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| (23) | w dodatku 2 część 1 pkt 1.3 otrzymuje brzmienie:
|
| (24) | w dodatku 2 część 1 pkt 1.5 otrzymuje brzmienie:
|
| (25) | w dodatku 2 część 1 pkt 1.6 otrzymuje brzmienie:
|
| (26) | w dodatku 2 część 1 pkt 1.8 otrzymuje brzmienie:
|
| (27) | w dodatku 2 część 1 pkt 1.9 otrzymuje brzmienie:
|
| (28) | w dodatku 2 część 1 pkt 1.10 otrzymuje brzmienie:
|
| (29) | w dodatku 2 część 1 pkt 1.10.1 otrzymuje brzmienie:
|
| (30) | w dodatku 2 część 1 pkt 1.10.2 otrzymuje brzmienie:
|
| (31) | w dodatku 2 część 1 pkt 1.11 otrzymuje brzmienie:
|
| (32) | w dodatku 2 część 1 pkt 1.12 otrzymuje brzmienie:
|
| (33) | dodatek 3 otrzymuje brzmienie: "Dodatek 3 Obliczanie standardowej straty momentu obrotowego Standardowe straty momentu obrotowego dla osi pokazano w Tabeli 1. Standardowe wartości podane w tabeli stanowią sumę ogólnej stałej wartości sprawności obejmującej straty zależne od obciążenia oraz ogólnej straty momentu obrotowego spowodowanej oporem tarcia obejmującej straty tarcia przy niskim obciążeniu. Dla osi podwójnych obliczeń dokonuje się, dodając połączoną sprawność osi z uwzględnieniem połączenia (SRT, HRT) do sprawności odpowiedniej osi pojedynczej (SR, HR). Tabela 1 Ogólna sprawność i strata oporu tarcia
Podstawowy opór tarcia (po stronie koła) Td0 oblicza się na podstawie następującego równania Td0 = T0 + T1 × igear używając wartości podanych w Tabeli 1. Standardową stratę momentu obrotowego Tloss,std po stronie wejściowej osi oblicza się na podstawie następującego równania  gdzie:
Odpowiadający moment obrotowy (po stronie wejściowej) osi oblicza się na podstawie równania  gdzie:
|
| (34) | w dodatku 4 pkt 3.1 lit. o) otrzymuje brzmienie:
|
| (35) | w dodatku 4 pkt 3.1 dodaje się tekst w brzmieniu:
|
| (36) | w dodatku 5 pkt 1.4 otrzymuje brzmienie: "W pobliżu prostokąta na znaku certyfikującym znajduje się również »podstawowy numer certyfikacji« określony w sekcji 4 numeru homologacji typu, o którym mowa w załączniku IV do rozporządzenia (UE) 2020/683, poprzedzony dwiema cyframi odpowiadającymi kolejnemu numerowi przyporządkowanemu najnowszej zmianie technicznej wprowadzonej do niniejszego rozporządzenia oraz literą »L« oznaczającą przyznanie świadectwa dla osi. W przypadku niniejszego rozporządzenia tym kolejnym numerem jest 02."; |
| (37) | w dodatku 5 pkt 1.4.1 otrzymuje brzmienie:
|
| (38) | w dodatku 5 pkt 2.1 otrzymuje brzmienie:
|
ZAŁĄCZNIK VIII
W załączniku VIII wprowadza się następujące zmiany:
| (1) | pkt 1 otrzymuje brzmienie:
|
| (2) | pkt 3 akapit pierwszy zdanie ostatnie otrzymuje brzmienie: "Wartość Cd·Adeclared stanowi informację wejściową wykorzystywaną przez narzędzie symulacyjne i wartość odniesienia wykorzystywaną podczas badania zgodności certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa."; |
| (3) | pkt 3.3 otrzymuje brzmienie:
(*1) Regulamin nr 54 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące homologacji opon pneumatycznych pojazdów użytkowych i ich przyczep (Dz.U. L 183 z 11.7.2008, s. 41)." |
| (4) | w pkt 3.4 akapit pierwszy zdanie pierwsze wyrażenie "ISO/TS" zastępuje się wyrażeniem "IATF"; |
| (5) | pkt 3.4.1.2 otrzymuje brzmienie:
gdzie: »Nieliniowość« oznacza maksymalne odchylenie między idealnymi a faktycznymi właściwościami sygnału wyjściowego w stosunku do wielkości mierzonej w ramach określonego zakresu pomiaru. »Powtarzalność« oznacza stopień zgodności wyników kolejnych pomiarów tej samej wielkości mierzonej przeprowadzonych w tych samych warunkach pomiaru. »Przesłuch« oznacza sygnał w głównym punkcie wyjściowym czujnika (My) wygenerowany przez wielkość mierzoną (Fz) oddziałującą na ten czujnik, który różni się od sygnału generowanego przez wielkość mierzoną przypisaną do tego punktu wyjściowego. Układ współrzędnych przyporządkowuje się zgodnie z normą ISO 4130. Zarejestrowane dane dotyczące momentu obrotowego koryguje się o wskazaną przez dostawcę wartość błędu urządzenia pomiarowego."; |
| (6) | pkt 3.4.3 otrzymuje brzmienie:
|
| (7) | pkt 3.4.7.2 otrzymuje brzmienie:
|
| (8) | pkt 3.4.9 akapit pierwszy zdanie ostatnie otrzymuje brzmienie: "Czujnik podczerwieni kalibruje się zgodnie z normą ASTM E2847 lub VDI/VDE 3511."; |
| (9) | pkt 3.5.2 zdanie drugie otrzymuje brzmienie: "maksymalna prędkość: 95 km/h dla średnich i ciężkich samochodów ciężarowych i 103 km/h dla ciężkich autobusów."; |
| (10) | pkt 3.5.3.1 ppkt (vi) zdanie ostatnie otrzymuje brzmienie: "Przy każdorazowym ponownym zamontowaniu lub dostosowaniu anemometru na pojeździe należy przeprowadzić badanie kalibracji niewspółosiowości."; |
| (11) | pkt 3.5.3.1 ppkt (vii) otrzymuje brzmienie:
|
| (12) | pkt 3.5.3.3 zdanie ostatnie otrzymuje brzmienie: "Faza postoju nie może trwać dłużej niż 15 minut." |
| (13) | pkt 3.5.3.4 zdanie ostatnie otrzymuje brzmienie: "Faza rozgrzewania zgodnie z niniejszym punktem nie może być krótsza od fazy postoju i nie może przekraczać 30 minut."; |
| (14) | w pkt 3.5.3.5 dodaje się ppkt w brzmieniu:
|
| (15) | pkt 3.6.3 zdanie ostatnie otrzymuje brzmienie: "Przy przeprowadzaniu oceny nie wykorzystuje się sygnałów momentu obrotowego kół i prędkości obrotowej silnika, wału Cardana ani średniej prędkości obrotowej kół."; |
| (16) | pkt 3.6.5 lit. c) otrzymuje brzmienie:
|
| (17) | w pkt 3.9 tabela 2 otrzymuje brzmienie: "Tabela 1 Dane wejściowe na potrzeby narzędzia do wstępnego przetwarzania danych dotyczących oporu powietrza - plik zawierający dane o pojeździe
|
| (18) | w pkt 3.9 tabela 5 wiersz dziesiąty otrzymuje brzmienie:
|
| (19) | w pkt 3.10.1.1 ppkt (viii) sekcja dotycząca badania przeprowadzanego przy niskiej prędkości otrzymuje brzmienie: "Badanie przeprowadzane przy niskiej prędkości: (T lms,avrg - T grd ) × (1 - tol) ≤ (T lms,avrg - T grd ) ≤ (T lms,avrg - T grd ) × (1 + tol) T grd = F grd,avrg × r dyn,avrg gdzie:
|
| (20) | w pkt 3.10.1.1 ppkt (xi) zdanie pierwsze otrzymuje brzmienie: "kontrola wiarygodności prędkości obrotowej silnika, prędkości obrotowej wału Cardana lub średniej prędkości obrotowej kół, w zależności od tego, która z tych prędkości obrotowych ma zastosowanie:" |
| (21) | w pkt 3.10.1.1 ppkt (xi) po zdaniu pierwszym zwrot "prędkość obrotowa silnika" zastępuje się w sześciu przypadkach wystąpienia zwrotem "prędkość obrotowa silnika lub średnia prędkość obrotowa kół"; |
| (22) | pkt 3.11 akapit ostatni otrzymuje brzmienie: "Kilka zadeklarowanych wartości Cd·Adeclared można utworzyć na podstawie pojedynczej zmierzonej wartości Cd·Acr (0), o ile spełnione są przepisy dotyczące rodziny zgodnie z pkt 3.1 dodatku 5 w odniesieniu do średnich i ciężkich samochodów ciężarowych oraz pkt 4.1 dodatku 5 w odniesieniu do ciężkich autobusów."; |
| (23) | w dodatku 2 część 1 pkt 1.2 otrzymuje brzmienie:
|
| (24) | dodatek 3 otrzymuje brzmienie: "Dodatek 3 Wymagania dotyczące wysokości samochodów ciężarowych jednoczłonowych i ciągników
| ||||||||||||||||||||||||||||||||||||
| (25) | w dodatku 4 nagłówek otrzymuje brzmienie: "Konfiguracje standardowych rodzajów nadwozia i naczep dla samochodów ciężarowych jednoczłonowych i ciągników"; |
| (26) | w dodatku 4 pkt 1 otrzymuje brzmienie: "Średnie samochody ciężarowe jednoczłonowe i ciężkie samochody ciężarowe jednoczłonowe, w przypadku których określa się wartość oporu powietrza, muszą spełnić wymagania dotyczące standardowych rodzajów nadwozia, które opisano w niniejszym dodatku. Ciągniki muszą spełnić wymagania dotyczące standardowych naczep, które opisano w niniejszym dodatku."; |
| (27) | w dodatku 4 pkt 2 tabela 8 otrzymuje brzmienie: "Tabela 3 Przyporządkowanie standardowych rodzajów nadwozia i naczep do badania przy stałej prędkości
|
| (28) | w dodatku 4 pkt 3 otrzymuje brzmienie: "Standardowe rodzaje nadwozia B-II, B1, B2, B3, B4 i B5 są konstruowane jako nadwozie ze sztywną karoserią zgodnie z konstrukcją suchego pojemnika. Są one wyposażone w dwie pary drzwi tylnych, bez jakichkolwiek drzwi bocznych. Standardowe rodzaje nadwozia nie są wyposażone w platformy załadunkowe, przednie spojlery ani osłony boczne służące do zmniejszenia oporu aerodynamicznego. Specyfikację standardowych rodzajów nadwozia przedstawiono w:
|
| (29) | w dodatku 4 pkt 5 dodaje się tabelę w brzmieniu: "Tabela 9a Specyfikacja standardowego nadwozia typu »B-II«
|
| (30) | w dodatku 4 pkt 5 tabele 9, 10, 11, 12 i 13 kolumna czwarta wiersz siódmy otrzymuje brzmienie: "Masa jest wykorzystywana w narzędziu symulacyjnym jako wartość ogólna i nie wymaga weryfikacji pod kątem badań oporu powietrza"; |
| (31) | w dodatku 5 nagłówek otrzymuje brzmienie: "Rodzina oporu powietrza"; |
| (32) | w dodatku 5 pkt 1 zdanie trzecie otrzymuje brzmienie: "Producent może określić, które pojazdy należą do jednej rodziny pojazdów podobnych w zakresie oporu powietrza, pod warunkiem że spełnione są kryteria dotyczące przynależności wyszczególnione w pkt 3 w odniesieniu do średnich samochodów ciężarowych, ciężkich samochodów ciężarowych i w pkt 6 w odniesieniu do ciężkich autobusów."; |
| (33) | w dodatku 5 pkt 2 akapit drugi otrzymuje brzmienie: "Oprócz parametrów wymienionych w pkt 4 niniejszego dodatku w odniesieniu do średnich i ciężkich samochodów ciężarowych oraz w pkt 6.1 niniejszego dodatku w odniesieniu do ciężkich autobusów producent może wprowadzić dodatkowe kryteria pozwalające na określenie rodzin silników o węższym zakresie."; |
| (34) | w dodatku 5 pkt 4 otrzymuje brzmienie:
|
| (35) | w dodatku 5 pkt 4.1 zdanie pierwsze otrzymuje brzmienie: "Średnie i ciężkie samochody ciężarowe można podzielić na grupy w ramach rodziny, o ile należą one do tej samej grupy pojazdów zgodnie z tabelą 1 lub tabelą 2 załącznika I oraz spełnione zostaną następujące kryteria:"; |
| (36) | w dodatku 5 pkt 4.1 lit. c) zdanie pierwsze otrzymuje brzmienie: "w przypadku pojazdów z ramą: taka sama wysokość kabiny nad ramą."; |
| (37) | w dodatku 5 pkt 5 otrzymuje brzmienie:
|
| (38) | w dodatku 5 pkt 5.2 otrzymuje brzmienie:
|
| (39) | w dodatku 5 pkt 5.4 otrzymuje brzmienie:
|
| (40) | w dodatku 5 pkt 5.5 otrzymuje brzmienie:
|
| (41) | w dodatku 5 dodaje się punkty w brzmieniu:
|
| (42) | w dodatku 6 pkt 3 otrzymuje brzmienie:
|
| (43) | w dodatku 6 pkt 4.6 otrzymuje brzmienie:
|
| (44) | dodatek 7 otrzymuje brzmienie: "Dodatek 7 Wartości standardowe W niniejszym dodatku opisano wartości standardowe w odniesieniu do zadeklarowanej wartości oporu powietrza Cd·Adeclared . W przypadku stosowania wartości standardowych do narzędzia symulacyjnego nie wprowadza się żadnych danych wejściowych dotyczących oporu powietrza. W takiej sytuacji wartości standardowe są automatycznie przypisywane przez narzędzie symulacyjne.
|
| (45) | w dodatku 8 tekst nagłówka otrzymuje brzmienie: "Oznakowania Jeżeli pojazd został certyfikowany zgodnie z niniejszym załącznikiem, na kabinie lub nadwoziu znajduje się:"; |
| (46) | w dodatku 8 pkt 1.4 otrzymuje brzmienie: "Znak certyfikujący obejmuje również w pobliżu prostokąta »podstawowy numer certyfikacji« określony w sekcji 4 numeru homologacji typu, o którym mowa w załączniku I do rozporządzenia (UE) 2020/683, poprzedzony dwiema cyframi odpowiadającymi kolejnemu numerowi przyporządkowanemu najnowszej zmianie technicznej wprowadzonej do niniejszego rozporządzenia lub poprzedzony literą »P« oznaczającą przyznanie homologacji w odniesieniu do oporu powietrza. W przypadku niniejszego rozporządzenia tym kolejnym numerem jest 02."; |
| (47) | w dodatku 8 pkt 1.4.1 otrzymuje brzmienie: "Przykład i wymiary znaku certyfikującego  Na podstawie powyższego znaku certyfikującego umieszczonego na kabinie stwierdza się, że dany typ pojazdu otrzymał certyfikację w Polsce (e20), zgodnie z niniejszym rozporządzeniem. Pierwsze dwie cyfry (02) wskazują numer sekwencji przypisany najnowszej zmianie technicznej wprowadzonej do niniejszego rozporządzenia. Kolejna litera wskazuje, że certyfikację przyznano w odniesieniu do oporu powietrza (P). Ostatnie pięć cyfr (00005) to cyfry przypisane danej wartości oporu powietrza przez organ udzielający homologacji jako podstawowy numer certyfikacji."; |
| (48) | w dodatku 8 pkt 2.1 otrzymuje brzmienie: "Numer certyfikacji w odniesieniu do oporu powietrza zawiera następujące elementy: eX*YYYY/YYYY*ZZZZ/ZZZZ*P*00000*00
|
| (49) | w dodatku 9 tabela 1 wiersz siódmy otrzymuje brzmienie:
|
(*1) Regulamin nr 54 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące homologacji opon pneumatycznych pojazdów użytkowych i ich przyczep (Dz.U. L 183 z 11.7.2008, s. 41)."
(1) specyfikacja przełożeń przekładni co najmniej z dokładnością do 3 miejsc po przecinku
(2) jeżeli sygnał prędkości obrotowej wału Cardana albo sygnał średniej prędkości obrotowej kół jest przekazywany do narzędzia do wstępnego przetwarzania danych dotyczących oporu powietrza (zob. pkt 3.4.3; wariant 1 dla pojazdów z przemiennikiem momentu obrotowego lub wariant 2) parametr wejściowy dotyczący przełożenia osi ustawia się na »1 000«
(1) dane wejściowe należy dostarczyć wyłącznie w przypadku, gdy wartość jest niższa niż 88 km/h
(3) jeżeli średnia prędkość obrotowa kół jest przekazywana do narzędzia do wstępnego przetwarzania danych dotyczących oporu powietrza (zob. pkt 3.4.3 wariant 2), parametry wejściowe dotyczące przełożenia osi ustawia się na »1 000«";
(*2) Ocenę pod kątem zgodności produkcji przeprowadza się w okresie pierwszych dwóch lat
ZAŁĄCZNIK IX
"ZAŁĄCZNIK IX
WERYFIKOWANIE DANYCH DOTYCZĄCYCH URZĄDZEŃ POMOCNICZYCH SAMOCHODÓW CIĘŻAROWYCH I AUTOBUSÓW
1. Wprowadzenie
W niniejszym załączniku opisano przepisy dotyczące deklarowania technologii i innych istotnych informacji wejściowych dotyczących systemów pomocniczych pojazdów ciężkich do celów określenia indywidualnych emisji CO2 w pojazdach.
»Pobór mocy przez następujące typy urządzeń pomocniczych jest mierzony przez narzędzie symulacyjne przy użyciu średnich ogólnych modeli poboru mocy dla poszczególnych technologii:«;
| a) | wentylator chłodzący silnik; |
| b) | układ kierowniczy; |
| c) | Układ elektryczny |
| d) | układ pneumatyczny; |
| e) | system ogrzewania, wentylacji i klimatyzacji (HVAC); |
| f) | przystawka odbioru mocy (PTO) przekładni. |
Wartości ogólne są dodawane do narzędzia symulacyjnego i automatycznie stosowane w oparciu o odpowiednie informacje wejściowe zgodnie z przepisami niniejszego załącznika. Odnośne formaty danych wejściowych do narzędzia symulacyjnego opisano w załączniku III. Do celów jasnego odniesienia w niniejszym załączniku wymienione są również trzycyfrowe identyfikatory parametrów stosowane w załączniku III.";
2. Definicje
Na potrzeby niniejszego załącznika stosuje się następujące definicje. W nawiasie podano odpowiedni typ urządzenia pomocniczego.
| (1) | wentylator »montowany na wale korbowym« oznacza taki sposób zamontowania wentylatora, że jest on napędzany przez przedłużenie wału korbowego, często za pomocą kołnierza (wentylator chłodzący silnik); |
| (2) | wentylator »napędzany za pomocą paska lub przekładni« oznacza wentylator zamontowany w położeniu, w którym wymagany jest dodatkowy pasek, system naprężenia lub przekładnia (wentylator chłodzący silnik); |
| (3) | wentylator »napędzany hydraulicznie« oznacza wentylator napędzany olejem hydraulicznym, często montowany z dala od silnika. Układ hydrauliczny z instalacją olejową, pompą i zaworami wpływa na straty i poziom sprawności układu (wentylator chłodzący silnik); |
| (4) | wentylator »napędzany elektrycznie« oznacza wentylator napędzany silnikiem elektrycznym. Uwzględnia się sprawność pełnej przemiany energii, w tym pobieranej z / doprowadzanej do akumulatora (wentylator chłodzący silnik); |
| (5) | »sprzęgło wiskotyczne sterowane elektronicznie« oznacza sprzęgło, w którym szereg wejść czujnikowych wraz z logiką SW jest wykorzystywanych do elektronicznego uruchomienia przepływu płynu w sprzęgle wiskotycznym (wentylator chłodzący silnik); |
| (6) | »sprzęgło wiskotyczne sterowane czujnikiem bimetalicznym« oznacza sprzęgło, w którym złącze bimetaliczne wykorzystuje się do przekształcenia zmian temperatury w przemieszczenie mechanicznie. Wyporowa sterowana mechanicznie działa wtedy jako urządzenie uruchamiające sprzęgło (wentylator chłodzący silnik); |
| (7) | »sprzęgło skokowe« oznacza urządzenie mechaniczne, które jest uruchamiane wyłącznie w dwóch odrębnych etapach (brak stałych zmiennych) (wentylator chłodzący silnik); |
| (8) | »sprzęgło dwupołożeniowe« oznacza urządzenie mechaniczne, które jest albo w pełni załączone, albo w pełni rozłączone (wentylator chłodzący silnik); |
| (9) | »pompa wyporowa o zmiennej wydajności« oznacza urządzenie, które przekształca energię mechaniczną w energię cieczy hydraulicznej. Ilość cieczy pompowanej na jeden obrót pompy może zmieniać się podczas pracy pompy (wentylator chłodzący silnik); |
| (10) | »pompa wyporowa o stałej wydajności« oznacza urządzenie, które przekształca energię mechaniczną w energię cieczy hydraulicznej. Ilość cieczy pompowanej na jeden obrót pompy nie może zmienić się podczas pracy pompy (wentylator chłodzący silnik); |
| (11) | »sterowanie silnikiem elektrycznym« oznacza wykorzystywanie silnika elektrycznego do napędzania wentylatora. Silnik elektryczny przekształca energię elektryczną w energię mechaniczną. Moc i prędkość są sterowane przy użyciu konwencjonalnej technologii stosowanej w odniesieniu do silników elektrycznych (wentylator chłodzący silnik); |
| (12) | »pompa wyporowa o ustalonej wydajności (domyślna technologia)« oznacza pompę z wewnętrznym ograniczeniem natężenia przepływu (układ kierowniczy); |
| (13) | »pompa wyporowa o ustalonej wydajności z funkcją sterowania elektronicznego« oznacza pompę, w której natężeniem przepływu jest sterowane elektronicznie (układ kierowniczy); |
| (14) | »pompa o podwójnej wyporności« oznacza pompę z dwiema komorami (o takiej samej lub różnej wyporności) i mechanicznym wewnętrznym ograniczeniem natężenia przepływu (układ kierowniczy); |
| 14a) | »pompa o podwójnej wyporności z funkcją sterowania elektronicznego« oznacza pompę z dwiema komorami (o takiej samej lub różnej wyporności), które mogą funkcjonować łącznie lub - w szczególnych warunkach - osobno; Natężenie przepływu jest sterowane elektrycznie za pomocą zaworu (układ kierowniczy); |
| (15) | »sterowana mechanicznie pompa wyporowa o zmiennej wydajności« oznacza pompę, której wyporność jest sterowana mechanicznie wewnątrz pompy (skale ciśnienia wewnętrznego) (układ kierowniczy); |
| (16) | »sterowana elektronicznie pompa wyporowa o zmiennej wydajności« oznacza pompę, której wyporność jest sterowana elektronicznie (układ kierowniczy); |
| (17) | »pompa z napędem elektrycznym« oznacza układ kierowniczy napędzany silnikiem elektrycznym z ciągłą recyrkulacją cieczy hydraulicznej (układ kierowniczy); |
| 17 a) | »w pełni elektryczny układ sterowania« oznacza układ kierowniczy napędzany silnikiem elektrycznym bez ciągłej recyrkulacji cieczy hydraulicznej (układ kierowniczy); |
| (18) | - |
| (19) | »sprężarka powietrza z systemem oszczędzania energii« (ESS - energy saving system) oznacza sprężarkę zmniejszającą pobór mocy podczas przedmuchiwania, np. poprzez zamknięcie strony ssącej system oszczędzania energii jest sterowany przez ciśnienie powietrza w układzie (układ pneumatyczny); |
| (20) | »sprężarka ze sprzęgłem (wiskotycznym)« oznacza odłączaną sprężarkę, w której sprzęgło jest sterowane przez ciśnienie powietrza w układzie (brak inteligentnej strategii); podczas odłączenia sprzęgło wiskotyczne może powodować niewielkie straty (układ pneumatyczny); |
| (21) | »sprężarka ze sprzęgłem (mechanicznym)« oznacza odłączaną sprężarkę, w której sprzęgło jest sterowane przez ciśnienie powietrza w układzie (brak inteligentnej strategii) (układ pneumatyczny); |
| (22) | »system regulacji przepływu powietrza z optymalną regeneracją« lub »AMS« oznacza elektroniczną jednostkę obróbki powietrza, na którą składa się sterowana elektronicznie suszarka powietrzną służąca do zoptymalizowanej regeneracji powietrza i układ wybranego doprowadzania powietrza w warunkach najazdowych (wymagane jest sprzęgło lub system oszczędzania energii) (układ pneumatyczny); |
| (23) | »dioda elektroluminescencyjna« lub »LED« oznacza urządzenie półprzewodnikowe, które emituje światło widzialne, gdy przepływa przez nie prąd elektryczny (układ elektryczny); |
| (24) | - |
| (25) | »przystawka odbioru mocy« lub »PTO« oznacza urządzenie montowane na przekładni lub silniku, do którego można podłączyć opcjonalne urządzenie pobierające energię (»urządzenie pobierające energię«), np. pompę hydrauliczną; przystawka odbioru mocy zwykle jest urządzeniem opcjonalnym (PTO); |
| (26) | »mechanizm napędowy przystawki odbioru mocy« oznacza urządzenie w przekładni zapewniające możliwość zamontowania przystawki odbioru mocy (PTO); |
| 26a) | »zazębione koło zębate« oznacza koło zębate zazębione z pracującymi wałami silnika albo przekładni, kiedy sprzęgło PTO (w stosownych przypadkach) jest otwarte (PTO); |
| (27) | »sprzęgło zębate« oznacza (uruchamiane) sprzęgło umożliwiające przenoszenie momentu obrotowego głównie przez siły mechaniczne powstające między zazębiającymi się zębami. Sprzęgło zębate może być włączone albo rozłączone. Sprzęgło zębate działa tylko w warunkach braku obciążenia (np. przy zmianach biegów w przekładni ręcznej) (PTO); |
| (28) | »synchronizator« oznacza rodzaj sprzęgła zębatego, w którym wykorzystuje się urządzenie cierne do wyrównania prędkości obracających się części, które mają zostać ze sobą sprzężone (PTO); |
| (29) | »sprzęgło wielotarczowe« oznacza sprzęgło, w którym kilka okładzin ciernych umieszczonych jest równolegle, dzięki czemu wszystkie pary cierne mają taką samą siłę nacisku. Sprzęgła wielotarczowe mają kompaktową budowę i mogą być sprzęgane albo rozłączane pod obciążeniem. Mogą być zaprojektowane jako sprzęgła suche lub mokre (PTO); |
| (30) | »koło przesuwne« oznacza koło zębate wykorzystywane jako element przesuwny, gdy przesunięcie odbywa się poprzez przesunięcie koła zębatego na jego wale do punktu zazębienia koła zębatego współpracującego lub odsunięcie od tego punktu zazębienia (PTO); |
| (31) | »sprzęgło skokowe (wyłączenie + 2 etapy)« oznacza urządzenie mechaniczne, które może być uruchomione wyłącznie w dwóch odrębnych etapach lub wyłączone (brak stałych zmiennych) (wentylator chłodzący silnik); |
| (32) | »sprzęgło skokowe (wyłączenie + 3 etapy)« oznacza urządzenie mechaniczne, które może być uruchomione wyłącznie w trzech odrębnych etapach lub wyłączone (brak stałych zmiennych) (wentylator chłodzący silnik); |
| (33) | »przełożenie sprężarka/silnik« oznacza przełożenie prędkości jazdy do przodu silnika na prędkość obrotową sprężarki powietrza bez poślizgu (i = nin/nout) (układ pneumatyczny); |
| (34) | »zawieszenie pneumatyczne sterowane mechanicznie« oznacza układ zawieszenia pneumatycznego, w którym zawory sterujące zawieszeniem pneumatycznym działają na zasadzie mechanicznej bez elektroniki i oprogramowania (układ pneumatyczny); |
| (35) | »zawieszenie pneumatyczne sterowane elektronicznie« oznacza układ zawieszenia pneumatycznego, w którym do elektronicznego uruchamiania zaworów sterujących zawieszeniem pneumatycznym wykorzystywane są wejścia czujnikowe z logiką oprogramowania (układ pneumatyczny); |
| (36) | »pneumatyczne dozowanie czynnika SCR« oznacza, że do dozowania czynnika do układu wydechowego stosuje się sprężone powietrze (układ pneumatyczny); |
| (37) | »pneumatyczna technologia sterowania drzwiami« oznacza, że drzwi pasażera w pojeździe sterowane są z wykorzystaniem sprężonego powietrza; |
| (38) | »elektryczna technologia sterowania drzwiami« oznacza, że drzwi pasażera w pojeździe sterowane są z wykorzystaniem silnika elektrycznego lub z wykorzystaniem układu elektrohydraulicznego (układ pneumatyczny); |
| (39) | »mieszana technologia sterowania drzwiami« oznacza, że w pojeździe zainstalowano zarówno »pneumatyczną technologię sterowania drzwiami«, jak i »elektryczną technologię sterowania drzwiami« (układ pneumatyczny); |
| (40) | »inteligentny system regeneracji« oznacza układ pneumatyczny, w którym zapotrzebowanie na regenerowane powietrze jest zoptymalizowane pod kątem jakości wytwarzanego suchego powietrza (układ pneumatyczny); |
| (41) | »inteligentny system sprężania« oznacza układ pneumatyczny, w którym doprowadzanie powietrza jest sterowane automatycznie z funkcją preferowanego doprowadzania powietrza podczas warunków najazdowych (układ pneumatyczny); |
| (42) | »oświetlenie wewnętrzne« oznacza oświetlenie w przedziale pasażerskim zainstalowane w celu wypełnienia wymagań pkt 7.8. (sztuczne oświetlenie wewnętrzne) w załączniku 3 do regulaminu ONZ nr 107 (*1) (układ elektryczny); |
| (43) | »światła do jazdy dziennej« oznaczają »światło do jazdy dziennej« zgodnie z pkt 2.7.25 regulaminu ONZ nr 48 (*2) (układ elektryczny); |
| (44) | »światła pozycyjne« oznaczają »światło obrysowe boczne« zgodnie z pkt 2.7.24 regulaminu ONZ nr 48 (układ elektryczny); |
| (45) | »światła hamowania« oznaczają »światło hamowania« zgodnie z pkt 2.7.12 regulaminu ONZ nr 48 (układ elektryczny); |
| (46) | »reflektory samochodowe« oznaczają »światło mijania« zgodnie z pkt 2.7.10 regulaminu ONZ nr 48 oraz »światło drogowe« zgodnie z pkt 2.7.9 regulaminu ONZ nr 48 (układ elektryczny); |
| (47) | »alternator« oznacza maszynę elektryczną służącą do ładowania akumulatora i dostarczania mocy elektrycznej do pomocniczego układu elektrycznego, gdy pracuje silnik spalinowy wewnętrznego spalani pojazdu. Alternator nie może brać udziału w napędzaniu pojazdu (układ elektryczny); |
| (48) | »układ z inteligentnym alternatorem« oznacza układ jednego lub większej liczby alternatorów w połączeniu z jednym lub większą liczbą dedykowanych REESS, który jest sterowany elektronicznie z preferowanym wytwarzaniem energii elektrycznej w warunkach najazdowych (układ elektryczny); |
| (49) | »układ ogrzewania, wentylacji i klimatyzacji« lub układ HVAC oznacza układ, który może aktywnie ogrzewać lub aktywnie schładzać oraz wymieniać lub zastępować powietrze w celu zapewnienia lepszej jakości powietrza w przedziale pasażera lub przedziale kierowcy (układ HVAC); |
| (50) | »konfiguracja układu HVAC« oznacza połączenie elementów układu HVAC zgodnie z tabelą 13 niniejszego załącznika (układ HVAC); |
| (51) | »system komfortu termicznego w przedziale pasażerskim« oznacza system, który wykorzystuje wentylatory do zapewnienia obiegu powietrza w pojeździe lub wdmuchuje świeże powietrze do pojazdu, a przepływ powietrza może być co najmniej aktywnie chłodzony lub ogrzewany. Powietrze jest rozprowadzane od strony dachu pojazdu, a w przypadku pojazdów dwupokładowych, od strony obu podłóg. W przypadku pojazdów dwupokładowych z otwartym dachem, na dolnym pokładzie (układ HVAC); |
| (52) | »liczba pomp ciepła przedziału pasażerskiego« oznacza liczbę pomp ciepła zainstalowanych w pojeździe w celu ogrzewania lub chłodzenia powietrza w kabinie lub świeżego powietrza dostarczanego do przedziału pasażerskiego. Jeśli dana pompa ciepła jest wykorzystywana do obsługi przedziału pasażerskiego i przedziału kierowcy, liczy się ją tylko dla przedziału pasażerskiego (układ HVAC). Jeżeli zainstalowane są różne pompy ciepła do ogrzewania i chłodzenia, liczbę pomp ciepła określa się jako niższą liczbę dotyczącą obu przypadków oddzielnie - tzn. liczbę pomp ciepła do chłodzenia i liczbę pomp ciepła do ogrzewania należy rozpatrywać z osobna (np. w przypadku dwóch pomp ciepła do chłodzenia i jednej pompy ciepła do ogrzewania uwzględnia się tylko jedną pompę ciepła); |
| (53) | »układ klimatyzacji przedziału kierowcy« oznacza, że w pojeździe zainstalowany jest układ, który może schładzać powietrze w kabinie lub świeże powietrze doprowadzane do kierowcy lub przedziału kierowcy (układ HVAC); |
| (54) | »układ klimatyzacji przedziału pasażerskiego« oznacza, że w pojeździe zainstalowany jest układ, który może schładzać powietrze w kabinie lub świeże powietrze doprowadzane do przedziału pasażera (układ HVAC); |
| (55) | »niezależna pompa ciepła przedziału kierowcy« oznacza, że w pojeździe zainstalowana jest pompa ciepła, która jest wykorzystywana tylko w kabinie kierowcy (układ HVAC); |
| (56) | »dwustopniowa pompa ciepła« oznacza pompę ciepła, w której stopień uruchomienia może być osiągnięty wyłącznie w dwóch etapach, ale nie z wykorzystaniem stałych zmiennych (układ HVAC); |
| (57) | »trójstopniowa pompa ciepła« oznacza pompę ciepła, w której stopień uruchomienia może być osiągnięty wyłącznie w trzech etapach, ale nie z wykorzystaniem stałych zmiennych (układ HVAC); |
| (58) | »czterostopniowa pompa ciepła« oznacza pompę ciepła, w której stopień uruchomienia może być osiągnięty wyłącznie w czterech etapach, ale nie z wykorzystaniem stałych zmiennych (układ HVAC); |
| (59) | »bezstopniowa pompa ciepła« oznacza pompę ciepła, w której stopień uruchomienia jest regulowany w sposób ciągły lub w której sprężarka klimatyzacji jest napędzana silnikiem elektrycznym o bezstopniowo regulowanej prędkości (układ HVAC); |
| (60) | »moc pomocniczego urządzenia grzewczego« zgodnie z treścią etykiety określonej w pkt 4 załącznika 7 do regulaminu ONZ nr 122 (*3) (układ HVAC); |
| (61) | »oszklenie zespolone« oznacza okna przedziału pasażerskiego składające się z dwóch tafli szklanych oddzielonych przestrzenią wypełnioną gazem lub próżnią. W przypadku większej liczby rodzajów okien w przedziale pasażerskim należy wybrać rodzaj okien przeważający pod względem powierzchni. Na potrzeby oceny przeważającego rodzaju okien nie uwzględnia się szyby przedniej, okna tylnego, okna bocznego (okien bocznych) kierowcy, okien w drzwiach, okien nad i przed osią przednią (zob. przykłady na rys. 1), ani okien uchylnych (układ HVAC); Rysunek 1 Okna nieuwzględniane przy ustalaniu przeważającego rodzaju okien 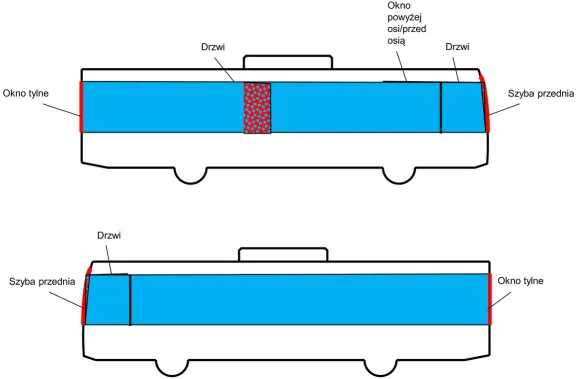 |
| (62) | »pompa ciepła« oznacza układ wykorzystujący czynnik chłodniczy w procesie obiegowym do przekazywania energii cieplnej z otoczenia do przedziału pasażerskiego lub przedziału kierowcy lub do przekazywania energii cieplnej w przeciwnym kierunku (funkcja chłodzenia lub ogrzewania) o współczynniku wydajności większym niż 1 (układ HVAC); |
| (63) | »pompa ciepła R-744« oznacza pompę ciepła wykorzystującą czynnik chłodniczy R-744 jako czynnik roboczy (układ HVAC); |
| (64) | »pompa ciepła inna niż R-744« oznacza pompę ciepła wykorzystującą jako czynnik roboczy inny czynnik chłodniczy niż R-744; W odniesieniu do możliwych stopni uruchomienia (2-stopniowe, 3-stopniowe, 4-stopniowe, bezstopniowe) stosuje się definicje z ppkt 56-59 (układ HVAC); |
| (65) | »regulowany termostat chłodziwa« oznacza termostat chłodziwa, którego właściwości zależą od co najmniej jednego dodatkowego parametru wejściowego oprócz temperatury chłodziwa, np. działającego ogrzewania elektrycznego termostatu (układ HVAC); |
| (66) | »regulowane pomocnicze urządzenie grzewcze« oznacza zasilane paliwem urządzenie grzewcze z co najmniej dwoma poziomami wydajności grzewczej poza poziomem »wyłączony«, które można regulować w zależności od wymaganej wydajności układu ogrzewania w autobusie (układ HVAC); |
| (67) | »wymiennik ciepła gazów odlotowych silnika« oznacza wymiennik ciepła wykorzystujący energię cieplną gazów odlotowych silnika do ogrzewania obiegu chłodzenia (układ HVAC); |
| (68) | »oddzielne kanały rozprowadzania powietrza« oznaczają jeden kanał powietrzny lub wiele kanałów powietrznych podłączonych do systemu komfortu cieplnego w celu równomiernego rozprowadzenia klimatyzowanego powietrza w przedziale pasażerskim. Kanały powietrze mogą obejmować głośniki lub doprowadzenie wody i wiązkę elektryczną układu HVAC. W kanałach tych nie mogą być zainstalowane zbiorniki sprężonego powietrza. Za sprawą tego parametru modelu narzędzie symulacyjne uwzględnia zmniejszone straty wymiany ciepła do otoczenia lub elementów wewnątrz kanału. W przypadku konfiguracji HVAC 8, 9 i 10 w grupach pojazdów 31, 33, 35, 37 i 39 ten parametr wejściowy ustawia się na wartość »prawda«, ponieważ w konfiguracjach tych występują mniejsze straty, jako że schłodzone powietrze jest bezpośrednio wdmuchiwane do wnętrza pojazdu nawet bez kanału powietrznego. W przypadku wszystkich konfiguracji HVAC w grupach pojazdów 32, 34, 36, 38 i 40 ten parametr wejściowy ustawia się na wartość »prawda«, ponieważ odpowiada to stanowi techniki (układ HVAC); |
| (69) | »sprężarka napędzana elektrycznie« oznacza sprężarkę napędzaną silnikiem elektrycznym (układ pneumatyczny); |
| (70) | »elektryczna nagrzewnica wodna« oznacza urządzenie wykorzystujące energię elektryczną do ogrzewania chłodziwa pojazdu o współczynniku wydajności niższym niż 1, które jest aktywnie wykorzystywane w ramach funkcji ogrzewania podczas eksploatacji pojazdu na drodze (układ HVAC); |
| (71) | »elektryczna nagrzewnica powietrza« oznacza urządzenie wykorzystujące energię elektryczną do ogrzewania powietrza w przedziale pasażerskim lub przedziale kierowcy, o współczynniku wydajności niższym niż 1 (układ HVAC); |
| (72) | »inna technologia grzewcza« oznacza każdą w pełni elektryczną technologię wykorzystywaną do ogrzewania przedziału pasażerskiego lub przedziału kierowcy, inną niż technologie określone w definicjach w ppkt 62, 70 lub 71 (układ HVAC); |
| (73) | »konwencjonalny akumulator kwasowo-ołowiowy« oznacza akumulator kwasowo-ołowiowy, do którego nie mają zastosowania definicje określone w ppkt 74 i 75 (układ elektryczny); |
| (74) | »akumulator kwasowo-ołowiowy AGM« oznacza akumulatory kwasowo-ołowiowe, w których jako separatory między płytą z ładunkiem ujemnym a płytą z ładunkiem dodatnim stosowane są nasączone elektrolitem maty z włókna szklanego (układ elektryczny); |
| (75) | »żelowy akumulator kwasowo-ołowiowy« oznacza akumulatory kwasowo-ołowiowe, w których z elektrolitem wymieszany jest krzemionkowy środek żelujący (układ elektryczny); |
| (76) | »akumulator litowo-jonowy o dużej gęstości mocy« oznacza akumulator litowo-jonowy, w którym stosunek liczbowy między maksymalnym prądem znamionowym w [A] a pojemnością znamionową w [Ah] jest równy lub większy niż 10 (układ elektryczny); |
| (77) | »akumulator litowo-jonowy o dużej gęstości energii« oznacza akumulator litowo-jonowy, w którym stosunek liczbowy między maksymalnym prądem znamionowym w [A] a pojemnością znamionową w [Ah] jest mniejszy niż 10 (układ elektryczny); |
| (78) | »kondensator z przetwornicą DC/DC« oznacza (ultra) kondensatorowe urządzenie do magazynowania energii elektrycznej połączone z urządzeniem DC/DC, które dostosowuje poziom napięcia i steruje przepływem prądu do sieci tablicy urządzeń pobierających energię i z niej (układ elektryczny); |
| (79) | »autobus przegubowy« oznacza ciężki autobus, który jest pojazdem niekompletnym, pojazdem kompletnym lub pojazdem skompletowanym, składającym się z co najmniej dwóch sztywnych części jezdnych, które są ze sobą połączone przez część przegubową. Części mogą zostać ze sobą połączone i rozłączone tylko w warsztacie. W przypadku kompletnych lub skompletowanych ciężkich autobusów tego typu, część przegubowa umożliwia swobodne przemieszczanie się podróżnych między sztywnymi częściami jezdnymi. |
3. Opis istotnych informacji wejściowych dotyczących urządzeń pomocniczych dodawanych do narzędzia symulacyjnego
3.1. Wentylator chłodzący silnik
Informacje dotyczące technologii wentylatora chłodzącego silnik podaje się w oparciu o stosowne połączenia technologii napędzającej wentylator i technologii kontroli wentylatora, jak opisano w tabeli 4 poniżej.
Jeżeli w wykazie nie można znaleźć nowej technologii wykorzystywanej w obrębie zespołu napędzającego wentylator (np. montowanego na wale korbowym), podaje się technologię przypisaną do »domyślnej technologii zespołu napędzającego wentylator«.
Jeżeli w wykazie nie można znaleźć nowej technologii wykorzystywanej w obrębie dowolnego zespołu napędzającego wentylator, podaje się technologię przypisaną do »domyślnej technologii ogólnej«.
Tabela 4
Technologie wentylatora chłodzącego silnik (P181)
| Zespół napędzający wentylator | Kontrola wentylatora | Średnie i ciężkie samochody ciężarowe | Ciężkie autobusy |
| Montowany na wale korbowym | Sprzęgło wiskotyczne sterowane elektronicznie | X | X |
| Sprzęgło wiskotyczne sterowane czujnikiem bimetalicznym | X (DC) | X | |
| Sprzęgło skokowe | X |
| |
| Sprzęgło skokowe (wyłączenie + 2 etapy) |
| X | |
| Sprzęgło skokowe (wyłączenie + 3 etapy) |
| X | |
| Sprzęgło dwupołożeniowe | X | X (DC, DO) | |
| Napęd pasowy lub za pośrednictwem przekładni | Sprzęgło wiskotyczne sterowane elektronicznie | X | X |
| Sprzęgło wiskotyczne sterowane czujnikiem bimetalicznym | X (DC) | X | |
| Sprzęgło skokowe | X |
| |
| Sprzęgło skokowe (wyłączenie + 2 etapy) |
| X | |
| Sprzęgło skokowe (wyłączenie + 3 etapy) |
| X | |
| Sprzęgło dwupołożeniowe | X | X (DC) | |
| Z napędem hydraulicznym | Pompa wyporowa o zmiennej wydajności | X | X |
| Pompa wyporowa o stałej wydajności | X (DC, DO) | X (DC) | |
| Z napędem elektrycznym | Sterowanie silnikiem elektrycznym | X (DC) | X (DC) |
| X: zastosowana technologia, DC: domyślna technologia zespołu napędzającego wentylator, DO: domyślna technologia ogólna | |||
3.2. Układ kierowniczy
Technologię układu kierowniczego podaje się zgodnie z tabelą 5 w odniesieniu do każdej czynnej osi kierowanej w pojeździe.
Jeżeli w wykazie nie można znaleźć nowej technologii wykorzystywanej w obrębie zespołu technologii układu kierowniczego (np. napędzanego mechanicznie), podaje się technologię przypisaną do »domyślnej technologii zespołu technologii układu kierowniczego«. Jeżeli w wykazie nie można znaleźć nowej technologii wykorzystywanej w obrębie dowolnego zespołu technologii układu kierowniczego, podaje się technologię przypisaną do »domyślnej technologii ogólnej«.
Tabela 5
Technologie układu kierowniczego (P182)
| Zespół technologii układu kierowniczego | Technologia | Średnie i ciężkie samochody ciężarowe | Ciężkie autobusy |
| Z napędem mechanicznym | Stała wydajność | X (DC, DO) | X (DC, DO) |
| Stała wydajność, sterowanie elektroniczne | X | X | |
| Pompa o podwójnej wyporności | X | X | |
| Pompa o podwójnej wyporności z funkcją sterowania elektronicznego | X | X | |
| Zmienna wydajność, sterowanie mechaniczne | X | X | |
| Zmienna wydajność, sterowanie elektroniczne | X | X | |
| Elektryczny | Pompa z napędem elektrycznym | X (DC) | X (DC) |
| W pełni elektryczny układ sterowania | X | X | |
| X: zastosowana technologia, DC: domyślna technologia zespołu technologii układu kierowniczego domyślna technologia ogólna | |||
3.3. Układ elektryczny
3.3.1. Średnie i ciężkie samochody ciężarowe
Technologię układu elektrycznego podaje się zgodnie z
tabelą 6.
Jeżeli technologia użyta w pojeździe nie została wymieniona w wykazie, w narzędziu symulacyjnym podaje się »technologię standardową«.
Tabela 6
Technologie układu elektrycznego dla średnich i ciężkich samochodów ciężarowych (P183)
| Technologia |
| Technologia standardowa |
| Technologia standardowa - elektroluminescencyjne reflektory samochodowe |
3.3.2. Ciężkie autobusy
Technologię układu elektrycznego podaje się zgodnie z tabelą 7.
Tabela 7
Technologie układu elektrycznego dla ciężkich autobusów
| Zespół układu elektrycznego | Parametr | Parametr (numer identyfikacyjny) | Dane wejściowe do narzędzia symulacyjnego | Objaśnienia |
| Alternator | Technologia alternatora | P294 | konwencjonalne / inteligentne / brak alternatora | »inteligentne« deklaruje się w odniesieniu do układów odpowiadających definicjom podanym w pkt 2 ppkt 48; »brak alternatora« ma zastosowanie do hybrydowych pojazdów elektrycznych, które nie są wyposażone w alternator w pomocniczym układzie elektrycznym. W przypadku pojazdów wyłącznie elektrycznych wprowadzenie danych wejściowych nie jest wymagane. |
| Inteligentny alternator - maksymalny prąd znamionowy | P295 | wartość w [A] | Maksymalny prąd znamionowy przy prędkości nominalnej zgodnie z oznakowaniem lub arkuszem danych producenta, lub zmierzony zgodnie z normą ISO 8854:2012 Dane wejściowe dla poszczególnych inteligentnych alternatorów | |
| Inteligentny alternator - napięcie znamionowe | P296 | wartość w [V] | Dopuszczalne wartości: »12«, »24«, »48« Dane wejściowe dla poszczególnych inteligentnych alternatorów | |
| Akumulatory do układów z inteligentnym alternatorem | Technologia | P297 | konwencjonalny akumulator kwasowo-ołowiowy / akumulator kwasowo-ołowiowy AGM / żelowy akumulator kwasowo-ołowiowy / akumulator litowo-jonowy o dużej gęstości mocy / akumulator litowo-jonowy o dużej gęstości energii | Dane wejściowe dla poszczególnych akumulatorów ładowanych przez układ z inteligentnym alternatorem Jeżeli w wykazie nie można znaleźć technologii akumulatora, w charakterze parametru wyjściowego podaje się »konwencjonalny akumulator kwasowo-ołowiowy«. |
| Napięcie znamionowe | P298 | wartość w [V] | Dopuszczalne wartości: »12«, »24«, »48« Dane wejściowe dla poszczególnych akumulatorów ładowanych przez układ z inteligentnym alternatorem W przypadku akumulatorów skonfigurowanych szeregowo (np. dwie jednostki 12 V w układzie 24 V) należy podać rzeczywiste napięcie znamionowe poszczególnych akumulatorów (w tym przykładzie 12 V). | |
| Pojemność znamionowa | P299 | wartość w [Ah] | Pojemność w Ah zgodnie z oznakowaniem lub arkuszem danych producenta Dane wejściowe dla poszczególnych akumulatorów ładowanych przez układ z inteligentnym alternatorem | |
| Kondensatory do układów z inteligentnym alternatorem | Technologia | P300 | z przetwornicą DC/DC | Dane wejściowe dla poszczególnych akumulatorów ładowanych przez układ z inteligentnym alternatorem |
| Kapacytancja znamionowa | P301 | wartość w [F] | Kapacytancja w faradach (F) zgodnie z oznakowaniem lub arkuszem danych producenta Dane wejściowe dla poszczególnych kondensatorów ładowanych przez układ z inteligentnym alternatorem | |
| Napięcie znamionowe | P302 | wartość w [V] | Znamionowe napięcie robocze zgodnie z oznakowaniem lub arkuszem danych producenta Dane wejściowe dla poszczególnych kondensatorów ładowanych przez układ z inteligentnym alternatorem | |
| Zasilanie urządzeń pomocniczych | Możliwe zasilanie elektrycznych urządzeń pomocniczych z układu magazynowania energii wielokrotnego ładowania hybrydowych pojazdów elektrycznych | P303 | prawda / fałsz | Ustawia się wartość »prawda«, jeżeli pojazd jest wyposażony w kontrolowane łącze zasilania umożliwiające przesyłanie energii elektrycznej z układu magazynowania energii napędowej hybrydowego pojazdu elektrycznego do sieci tablicy urządzeń pobierających energię. Dane wejściowe wymagane tylko w przypadku hybrydowych pojazdów elektrycznych. |
| Oświetlenie wewnętrzne | Oświetlenie wewnętrzne elektroluminoscencyjne | P304 | prawda / fałsz | W przypadku tych parametrów ustawia się wartość »prawda«, jeżeli wszystkie światła tej kategorii są zgodne z definicjami określonymi w pkt 2 ppkt 42-46. |
| Oświetlenie zewnętrzne | Światła do jazdy dziennej elektroluminoscencyjne | P305 | prawda / fałsz | |
| Światła pozycyjne elektroluminoscencyjne | P306 | prawda / fałsz | ||
| Światła hamowania elektroluminoscencyjne | P307 | prawda / fałsz | ||
| Elektroluminoscencyjne reflektory samochodowe | P308 | prawda / fałsz |
3.4. Układ pneumatyczny
3.4.1. Układy pneumatyczne pracujące przy nadciśnieniu
3.4.1.1. Ilość doprowadzanego powietrza
W przypadku układów pneumatycznych pracujących przy nadciśnieniu podaje się ilość doprowadzanego powietrza zgodnie z tabelą 8.
Tabela 8
Układy pneumatyczne pracujące przy nadciśnieniu - ilość doprowadzanego powietrza
| Ilość doprowadzanego powietrza | Średnie i ciężkie samochody ciężarowe (część P184) | Ciężkie autobusy (P309) |
| Mała pojemność skokowa ≤ 250 cm3; 1 cylinder / 2 cylindry | X | X |
| Średnia 250 cm3 < pojemność skokowa ≤ 500 cm3; 1 cylinder / 2 cylindry 1-stopniowa | X | X |
| Średnia 250 cm3 < pojemność skokowa ≤ 500 cm3; 1 cylinder / 2 cylindry 2-stopniowa | X | X |
| Duża pojemość skokowa > 500 cm3; 1 cylinder / 2 cylindry 1-stopniowa / 2-stopniowa | X, DO |
|
| Duża pojemość skokowa > 500 cm3; 1-stopniowa |
| X, DO |
| Duża pojemość skokowa > 500 cm3; 2-stopniowa |
| X |
W przypadku sprężarki dwustopniowej stosuje się wyporową z pierwszego stopnia w celu określenia wielkości układu sprężarki powietrznej. W przypadku sprężarek beztłokowych deklaruje się »domyślną technologię ogólną« (DO).
W przypadku ciężkich autobusów ze sprężarkami napędzanymi elektrycznie jako parametr wejściowy dla wielkości dopływu powietrza podaje się »nie dotyczy«, ponieważ parametr ten nie jest uwzględniany przez narzędzie symulacyjne.
3.4.1.2. Technologie oszczędzania paliwa
Technologie oszczędzania paliwa podaje się zgodnie z kombinacjami wymienionymi w tabeli 9 dla średnich i ciężkich samochodów ciężarowych oraz w tabeli 10 dla ciężkich autobusów.
Tabela 9
Układy pneumatyczne pracujące przy podciśnieniu - technologie oszczędzania paliwa dla ciężkich samochodów ciężarowych, średnich samochodów ciężarowych (część P184)
| Nr kombinacji | Napęd sprężarki | Sprzęgło sprężarki | Sprężarka powietrza z systemem oszczędzania energii (ESS) | System regulacji przepływu powietrza z optymalną regeneracją (AMS) |
| 1 | mechaniczny | nie | nie | nie |
| 2 | mechaniczny | nie | tak | nie |
| 3 | mechaniczny | wiskotyczne | nie | nie |
| 4 | mechaniczny | mechaniczne | nie | nie |
| 5 | mechaniczny | nie | tak | tak |
| 6 | mechaniczny | wiskotyczne | nie | tak |
| 7 | mechaniczny | mechaniczne | nie | tak |
| 8 | elektryczny | nie | nie | nie |
| 9 | elektryczny | nie | nie | tak |
Tabela 10
Układy pneumatyczne pracujące przy podciśnieniu - technologie oszczędzania paliwa dla ciężkich autobusów
| Nr kombinacji | Napęd sprężarki (P310) | Sprzęgło sprężarki (P311) | Inteligentny system regeneracji (P312) | Inteligentny system sprężania (P313) |
| 1 | mechaniczny | nie | nie | nie |
| 2 | mechaniczny | nie | tak | nie |
| 3 | mechaniczny | nie | nie | tak |
| 4 | mechaniczny | nie | tak | tak |
| 5 | mechaniczny | wiskotyczne | nie | nie |
| 6 | mechaniczny | wiskotyczne | tak | nie |
| 7 | mechaniczny | wiskotyczne | nie | tak |
| 8 | mechaniczny | wiskotyczne | tak | tak |
| 9 | mechaniczny | mechaniczne | nie | nie |
| 10 | mechaniczny | mechaniczne | tak | nie |
| 11 | mechaniczny | mechaniczne | nie | tak |
| 12 | mechaniczny | mechaniczne | tak | tak |
| 13 | elektryczny | nie | nie | nie |
| 14 | elektryczny | nie | tak | nie |
3.4.1.3. Dalsze cechy charakterystyczne układu pneumatycznego ciężkich autobusów
Dalsze cechy charakterystyczne układu pneumatycznego ciężkich autobusów podaje się zgodnie z tabelą 11.
Tabela 11
Dalsze cechy charakterystyczne układu pneumatycznego ciężkich autobusów
| Parametr | Numer identyfikacyjny parametru | Dane wejściowe do narzędzia symulacyjnego | Objaśnienia |
| Przełożenie sprężarka/silnik | P314 | wartość w [-] | Przełożenie = prędkość sprężarki/prędkość obrotowa silnika Stosuje się wyłącznie w przypadku sprężarki z napędem mechanicznym |
| Wysokość wejścia bez przyklęku | P290 | wartość w [mm] | Zgodnie z definicjami określonymi w załączniku III pkt 2 ppkt 10. Dokumentację dotyczącą tej wartości przedstawia się za pomocą rysunków konfiguracji pojazdu wykorzystanych podczas parametryzacji sterowania zawieszenia pneumatycznego pojazdu. Wartość powinna odzwierciedlać stan, w jakim pojazd został dostarczony do klienta, w zwykłej odległości od podłoża podczas jazdy. Parametr ten dotyczy wyłącznie ciężkich autobusów. |
| Sterowanie zawieszenia pneumatycznego | P315 | mechaniczne/elektroniczne |
|
| Pneumatyczne dozowanie czynnika SCR | P316 | prawda/fałsz | Zob. pkt 2 ppkt 36 |
| Technologia sterowania drzwiami | P291 | pneumatyczna/mieszana/elektryczna |
|
3.4.2. Układy pneumatyczne pracujące przy podciśnieniu
W przypadku pojazdów z układami pneumatycznymi pracującymi przy podciśnieniu (podciśnienie względne) należy wprowadzić »Vacuum pump« albo »Vacuum pump + elec. driven« jako dane wejściowe do narzędzia symulacyjnego (P184). Technologia ta nie dotyczy ciężkich autobusów.
3.5. Układ HVAC
3.5.1. Układ HVAC dla średnich i ciężkich samochodów ciężarowych
Technologię układu HVAC podaje się zgodnie z tabelą 12.
Tabela 12
Technologie układu HVAC dla średnich i ciężkich samochodów ciężarowych (P185)
| Technologia |
| Brak (brak układu klimatyzacji przedziału kierowcy) |
| Standardowe wartości |
3.5.2. Układ HVAC ciężkich autobusów
Konfigurację układu HVAC podaje się zgodnie z definicjami określonymi w tabeli 13. Poszczególne konfiguracje przedstawiono w sposób graficzny na rys. 2.
Tabela 13
Konfiguracja układu HVAC ciężkich autobusów (P317)
| Konfiguracja układu HVAC | System komfortu termicznego w przedziale pasażerskim | Liczba pomp ciepła przedziału pasażerskiego zgodnie z pkt 2 ppkt 52 | Przedział kierowcy wyposażony w pompę (pompy) ciepła dla przedziału pasażerskiego | Niezależna pompa ciepła (niezależne pompy ciepła) dla przedziału kierowcy | |
| Jednoczłonowy | Przegubowy | ||||
| 1 | Nie | 0 | 0 | Nie | Nie |
| 2 | Nie | 0 | 0 | Nie | Tak |
| 3 | Tak | 0 | 0 | Nie | Nie |
| 4 | Tak | 0 | 0 | Nie | Tak |
| 5 | Tak | 1 | 1 lub 2 | Nie | Nie |
| 6 | Tak | 1 | 1 lub 2 | Tak | Nie |
| 7 | Tak | 1 | 1 lub 2 | Nie | Tak |
| 8 | Tak | > 1 | > 2 | Nie | Nie |
| 9 | Tak | > 1 | > 2 | Nie | Tak |
| 10 | Tak | > 1 | > 2 | Tak | Nie |
Rysunek 2
Konfiguracja układu HVAC ciężkich autobusów (jednoczłonowych i przegubowych)
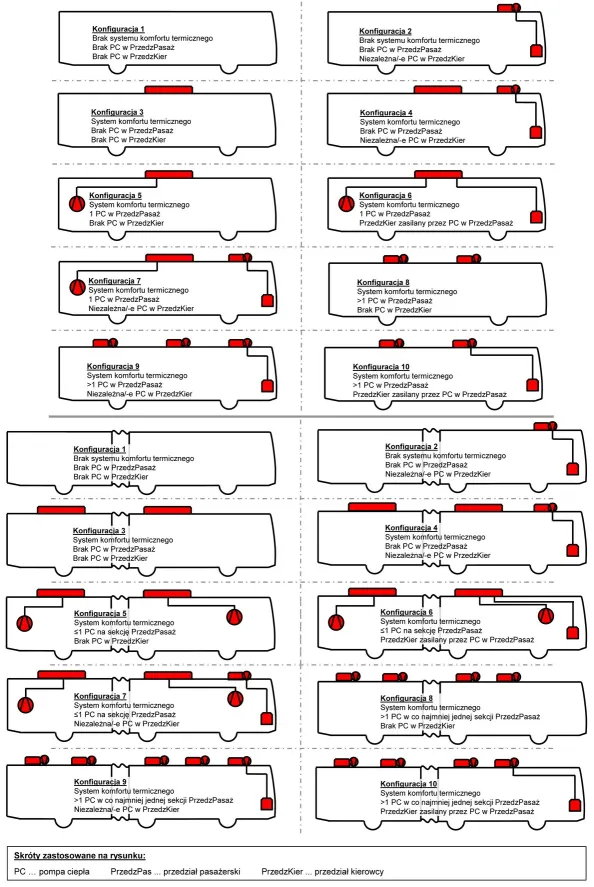
Parametry układu HVAC deklaruje się zgodnie z tabelą 14.
Tabela 14
Parametry układu HVAC (ciężkie autobusy)
| Parametr | Numer identyfikacyjny parametru | Dane wejściowe do narzędzia symulacyjnego | Objaśnienia |
| Typ pompy ciepła do chłodzenia przedziału kierowcy | P318 | none/not applicable/R-744/non R-744 2-stage/non R-744 3-stage/non R-744 4-stage/non R-744 continuous | w odniesieniu do konfiguracji układu HVAC 6 i 10 deklaruje się »not applicable« ze względu na zasilanie z pompy ciepła pasażera |
| Typ pompy ciepła do ogrzewania przedziału kierowcy | P319 | none/not applicable/R-744/non R-744 2-stage/non R-744 3-stage/non R-744 4-stage/non R-744 continuous | w odniesieniu do konfiguracji układu HVAC 6 i 10 deklaruje się »not applicable« ze względu na zasilanie z pompy ciepła pasażera |
| Typ pompy ciepła do chłodzenia przedziału pasażerskiego | P320 | none/R-744/non R-744 2-stage/non R-744 3-stage/non R-744 4-stage/non R-744 continuous | W przypadku wielu pomp ciepła z różnymi technologiami chłodzenia przedziału pasażerskiego należy zadeklarować przeważającą technologię (np. zgodnie z dostępną mocą lub preferowanym użytkowaniem podczas pracy). |
| Typ pompy ciepła do ogrzewania przedziału pasażerskiego | P321 | none/R-744/non R-744 2-stage/non R-744 3-stage/non R-744 4-stage/non R-744 continuous | W przypadku wielu pomp ciepła z różnymi technologiami ogrzewania przedziału pasażerskiego należy zadeklarować przeważającą technologię (np. zgodnie z dostępną mocą lub preferowanym użytkowaniem podczas pracy). |
| Moc pomocniczego urządzenia grzewczego | P322 | wartość w [W] | Moc znamionowa określona dla danego urządzenia. Należy podać wartość »0«, jeśli nie zainstalowano żadnego pomocniczego urządzenia grzewczego |
| Oszklenie zespolone | P323 | prawda/fałsz |
|
| Regulowany termostat chłodziwa | P324 | prawda/fałsz |
|
| Regulowane pomocnicze urządzenie grzewcze | P325 | prawda/fałsz |
|
| Wymiennik ciepła gazów odlotowych silnika | P326 | prawda/fałsz |
|
| Oddzielne kanały rozprowadzania powietrza | P327 | prawda/fałsz |
|
| Elektryczna nagrzewnica wodna | P328 | prawda/fałsz | Dane wejściowe podaje się tylko w przypadku hybrydowych pojazdów elektrycznych i pojazdów wyłącznie elektrycznych |
| Elektryczna nagrzewnica powietrza | P329 | prawda/fałsz | Dane wejściowe podaje się tylko w przypadku hybrydowych pojazdów elektrycznych i pojazdów wyłącznie elektrycznych |
| Inna technologia grzewcza | P330 | prawda/fałsz | Dane wejściowe podaje się tylko w przypadku hybrydowych pojazdów elektrycznych i pojazdów wyłącznie elektrycznych |
3.6 Przystawka odbioru mocy (PTO) w przekładni
W odniesieniu do ciężkich samochodów ciężarowych wyposażonych w przystawkę odbioru mocy lub mechanizm napędzający przystawki odbioru mocy zamontowane na przekładni pobór mocy ustala się na podstawie określonych wartości ogólnych. Wartości te przedstawiają te straty mocy w normalnym trybie pracy, gdy urządzenie pobierające energię podłączone do PTO, np. pompa hydrauliczna, jest wyłączone/ rozłączone. Pobór mocy związany z korzystaniem z urządzenia przy włączonym urządzeniu pobierającym energię jest dodany przez narzędzie symulacyjne i nie jest opisany poniżej.
Tabela 12
Zapotrzebowanie PTO na moc mechaniczną przy wyłączonym urządzeniu pobierającym energię w ciężkich samochodach ciężarowych
| Warianty konstrukcyjne dotyczące strat mocy (w porównaniu z przekładnią bez przystawki odbioru mocy lub mechanizmem napędowym przystawki odbioru mocy) | Strata mocy | |
| Dodatkowe części związane ze stratą oporu | ||
| Wały/koła zębate (P247) | Inne elementy (P248) | [W] |
| tylko jedno zazębione koło zębate umieszczone powyżej określonego poziomu oleju (brak dodatkowych kół zębatych) | - | 0 |
| wyłącznie wał napędowy przystawki odbioru mocy | sprzęgło zębate (zawierające synchronizator) lub koło zębate przesuwne | 50 |
| wyłącznie wał napędowy przystawki odbioru mocy | sprzęgło wielotarczowe | 350 |
| wyłącznie wał napędowy przystawki odbioru mocy | sprzęgło wielotarczowe z dedykowaną pompą do sprzęgła PTO | 3 000 |
| wał napędowy lub nie więcej niż 2 zazębione koła zębate | sprzęgło zębate (zawierające synchronizator) lub koło zębate przesuwne | 150 |
| wał napędowy lub nie więcej niż 2 zazębione koła zębate | sprzęgło wielotarczowe | 400 |
| wał napędowy lub nie więcej niż 2 zazębione koła zębate | sprzęgło wielotarczowe z dedykowaną pompą do sprzęgła PTO | 3 050 |
| wał napędowy lub więcej niż 2 zazębione koła zębate | sprzęgło zębate (zawierające synchronizator) lub koło zębate przesuwne | 200 |
| wał napędowy lub więcej niż 2 zazębione koła zębate | sprzęgło wielotarczowe | 450 |
| wał napędowy lub więcej niż 2 zazębione koła zębate | sprzęgło wielotarczowe z dedykowaną pompą do sprzęgła PTO | 3 100 |
| PTO obejmujące jedno dodatkowe koło zębate (lub większą liczbę dodatkowych kół zębatych), bez odłączania sprzęgła | - | 1 500 |
W przypadku wielu PTO zainstalowanych na przekładni deklaruje się jedynie część o największej stracie zgodnie z tabelą 12 w odniesieniu do kombinacji jej kryteriów »PTOShaftsGearWheels« oraz »PTOShaftsOtherElements«. W przypadku średnich samochodów ciężarowych i ciężkich autobusów nie przewiduje się deklarowania PTO zainstalowanych na przekładni.
(*1) Regulamin nr 107 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące homologacji pojazdów kategorii M2 i M3 w odniesieniu do ich budowy ogólnej, Dz.U. L 52 z 23.2.2018, s. 1.
(*2) Regulamin ONZ nr 48 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące homologacji pojazdów w odniesieniu do rozmieszczenia urządzeń oświetlenia i sygnalizacji świetlnej (Dz.U. L 14 z 16.1.2019, s. 42).
(*3) Regulamin nr 122 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite wymagania techniczne dotyczące homologacji pojazdów kategorii M, N i O w odniesieniu do ich układów ogrzewania (Dz.U. L 19 z 24.1.2020, s. 42)."
ZAŁĄCZNIK X
w załączniku X wprowadza się następujące zmiany:
| (1) | w pkt 2 tytuł otrzymuje brzmienie: "Definicje Do celów niniejszego załącznika, oprócz definicji zawartych w regulaminie nr 54 (1) Organizacji Narodów Zjednoczonych i regulaminie nr 117 (2) Organizacji Narodów Zjednoczonych, stosuje się następujące definicje: (1) Regulamin nr 54 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące homologacji opon pneumatycznych pojazdów użytkowych i ich przyczep (Dz.U. L 183 z 11.7.2008, s. 41)." (2) Regulamin nr 117 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące homologacji opon w odniesieniu do emisji hałasu toczenia lub przyczepności na mokrych nawierzchniach, lub oporu toczenia [2016/1350] (Dz.U. L 218 z 12.8.2016, s. 1).";" |
| (2) | w pkt 2 ppkt 3 lit. b) dodaje się średnik na końcu zdania; |
| (3) | pkt 2 ppkt 3 lit. c) otrzymuje brzmienie:
|
| (4) | w pkt 2 ppkt 3 lit. f) wyrażenie "EKG ONZ" zastępuje się wyrażeniem "ONZ"; |
| (5) | w pkt 2 dodaje się podpunkt w brzmieniu:
(3) Rozporządzenie Parlamentu Europejskiego i Rady (UE) 2020/740 z dnia 25 maja 2020 r. w sprawie etykietowania opon pod kątem efektywności paliwowej i innych parametrów, zmieniające rozporządzenie (UE) 2017/1369 oraz uchylające rozporządzenie (WE) nr 1222/2009 (Dz.U. L 177 z 5.6.2020, s. 1)";" |
| (6) | w pkt 3.1 wyrażenie "ISO/TS" zastępuje się wyrażeniem "IATF"; |
| (7) | pkt 3.2 otrzymuje brzmienie:
(4) Rozporządzenie Parlamentu Europejskiego i Rady (WE) nr 661/2009 z dnia 13 lipca 2009 r. w sprawie wymagań technicznych w zakresie homologacji typu pojazdów silnikowych dotyczących ich bezpieczeństwa ogólnego, ich przyczep oraz przeznaczonych dla nich układów, części i oddzielnych zespołów technicznych (Dz.U. L 200 z 31.7.2009, s. 1)." (5) Rozporządzenie Parlamentu Europejskiego i Rady (UE) 2019/2144 z dnia 27 listopada 2019 r. w sprawie wymogów dotyczących homologacji typu pojazdów silnikowych i ich przyczep oraz układów, komponentów i oddzielnych zespołów technicznych przeznaczonych do tych pojazdów, w odniesieniu do ich ogólnego bezpieczeństwa oraz ochrony osób znajdujących się w pojeździe i niechronionych uczestników ruchu drogowego, zmieniające rozporządzenie Parlamentu Europejskiego i Rady (UE) 2018/858 (Dz.U. L 325 z 16.12.2019, s. 1)";" |
| (8) | pkt 3.3 otrzymuje brzmienie:
|
| (9) | pkt 3.4.1 otrzymuje brzmienie:
|
| (10) | pkt 3.4.4 otrzymuje brzmienie: "Zgodnie z art. 38 ust. 2 rozporządzenia (UE) 2018/858, nie jest wymagane umieszczenie znaku homologacji typu WE na oponie certyfikowanej zgodnie z niniejszym rozporządzeniem."; |
| (11) | w pkt 4.2 na końcu dodaje się zdanie w brzmieniu: "Badania należy przeprowadzać na nowych oponach badanych w rozumieniu definicji określonej w pkt 2 regulaminu ONZ nr 117."; |
| (12) | w pkt 4.4.1 skreśla się ostatnie zdanie; |
| (13) | pkt 4.4.2 otrzymuje brzmienie:
|
| (14) | pkt 4.4.3 otrzymuje brzmienie:
|
| (15) | w punkcie 4.4.3 dodaje się punkty w brzmieniu:
|
| (16) | w dodatku 1 pkt 4 lit. c) otrzymuje brzmienie:
|
| (17) | w dodatku 1 pkt 7.2 otrzymuje brzmienie:
|
| (18) | w dodatku 2 sekcja I pkt 0.2 otrzymuje brzmienie:
|
| (19) | w dodatku 2 sekcja I pkt 0.4 otrzymuje brzmienie:
|
| (20) | w dodatku 2 sekcja I pkt 0.5 otrzymuje brzmienie:
|
| (21) | w dodatku 2 sekcja I pkt 0.11 otrzymuje brzmienie:
|
| (22) | w dodatku 2 w sekcji I dodaje się punkty w brzmieniu:
(6) Regulamin nr 30 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące homologacji opon pneumatycznych do pojazdów silnikowych i ich przyczep (Dz.U. L 201 z 30.7.2008, s. 70).";" |
| (23) | w dodatku 2 sekcja II pkt 6.3 otrzymuje brzmienie:
|
| (24) | w dodatku 2 sekcja II pkt 8.1 otrzymuje brzmienie:
|
| (25) | w dodatku 3 tabela 1 wiersz dziewiąty tekst pierwszej kolumny otrzymuje brzmienie: "Oznaczenie rozmiaru opony"; |
| (26) | w dodatku 3 w tabeli 1 dodaje się dwa nowe wiersze w brzmieniu:
|
| (27) | w dodatku 4 pkt 1.1 otrzymuje brzmienie:
|
(1) Regulamin nr 54 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące homologacji opon pneumatycznych pojazdów użytkowych i ich przyczep (Dz.U. L 183 z 11.7.2008, s. 41).
(2) Regulamin nr 117 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące homologacji opon w odniesieniu do emisji hałasu toczenia lub przyczepności na mokrych nawierzchniach, lub oporu toczenia [2016/1350] (Dz.U. L 218 z 12.8.2016, s. 1).";
(3) Rozporządzenie Parlamentu Europejskiego i Rady (UE) 2020/740 z dnia 25 maja 2020 r. w sprawie etykietowania opon pod kątem efektywności paliwowej i innych parametrów, zmieniające rozporządzenie (UE) 2017/1369 oraz uchylające rozporządzenie (WE) nr 1222/2009 (Dz.U. L 177 z 5.6.2020, s. 1)";
(4) Rozporządzenie Parlamentu Europejskiego i Rady (WE) nr 661/2009 z dnia 13 lipca 2009 r. w sprawie wymagań technicznych w zakresie homologacji typu pojazdów silnikowych dotyczących ich bezpieczeństwa ogólnego, ich przyczep oraz przeznaczonych dla nich układów, części i oddzielnych zespołów technicznych (Dz.U. L 200 z 31.7.2009, s. 1).
(5) Rozporządzenie Parlamentu Europejskiego i Rady (UE) 2019/2144 z dnia 27 listopada 2019 r. w sprawie wymogów dotyczących homologacji typu pojazdów silnikowych i ich przyczep oraz układów, komponentów i oddzielnych zespołów technicznych przeznaczonych do tych pojazdów, w odniesieniu do ich ogólnego bezpieczeństwa oraz ochrony osób znajdujących się w pojeździe i niechronionych uczestników ruchu drogowego, zmieniające rozporządzenie Parlamentu Europejskiego i Rady (UE) 2018/858 (Dz.U. L 325 z 16.12.2019, s. 1)";
(6) Regulamin nr 30 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące homologacji opon pneumatycznych do pojazdów silnikowych i ich przyczep (Dz.U. L 201 z 30.7.2008, s. 70).";"
ZAŁĄCZNIK XI
"ZAŁĄCZNIK Xa
ZGODNOŚĆ UŻYTKOWANIA NARZĘDZIA SYMULACYJNEGO ORAZ WŁAŚCIWOŚCI POWIĄZANYCH Z EMISJAMI CO2 I ZUŻYCIEM PALIWA W ODNIESIENIU DO CZĘŚCI, ODDZIELNYCH ZESPOŁÓW TECHNICZNYCH I UKŁADÓW: PROCEDURA BADANIA WERYFIKACYJNEGO
1. Wprowadzenie
W niniejszym załączniku określono wymagania dotyczące procedury badania weryfikacyjnego, która stanowi procedurę badania służącego zweryfikowaniu emisji CO2 przez nowe średnie i ciężkie samochody ciężarowe.
Procedura badania weryfikacyjnego obejmuje badanie drogowe mające na celu zweryfikowanie emisji CO2 przez nowe pojazdy po tym, jak zostaną wyprodukowane. Badanie przeprowadza producent pojazdu i nadzoruje je organ udzielający homologacji, który wydał licencję na użytkowanie narzędzia symulacyjnego.
Podczas procedury badania weryfikacyjnego mierzy się moment obrotowy i prędkość na kołach napędzanych, prędkość obrotową silnika, zużycie paliwa, włączony bieg pojazdu i pozostałe istotne parametry wymienione w pkt 6.1.6. Dane zmierzone wprowadza się do narzędzia symulacyjnego, które wykorzystuje dane wejściowe dotyczące pojazdów i informacje wejściowe wykorzystane do określania poziomu emisji CO2 generowanych przez pojazdy i poziomu zużycia paliwa przez pojazdy. Na potrzeby symulacji procedury badania weryfikacyjnego jako dane wejściowe wykorzystuje się chwilowo zmierzone moment obrotowy i prędkość obrotową kół oraz prędkość obrotową silnika. Aby pojazd przeszedł procedurę badania weryfikacyjnego, emisje CO2obliczone na podstawie zmierzonego zużycia paliwa muszą mieścić się w tolerancjach określonych w pkt 7, w porównaniu z emisjami CO2 z symulacji procedury badania weryfikacyjnego. Na rys. 1 przedstawiono schemat metody stosowanej w procedurze badania weryfikacyjnego Etapy oceny wykonywane przez narzędzie symulacyjne podczas symulacji procedury badania weryfikacyjnego opisano w dodatku 1 do niniejszego załącznika.
W ramach procedury badania weryfikacyjnego kontroluje się również poprawność zestawu danych wejściowych dotyczących pojazdów z certyfikacji właściwości powiązanych z emisjami CO2 i zużyciem paliwa w odniesieniu do części, oddzielnych zespołów technicznych i układów, aby sprawdzić dane i proces przetwarzania danych. Poprawność danych wejściowych powiązanych z częściami, oddzielnymi zespołami technicznymi i układami istotnymi w kontekście oporu powietrza i oporu toczenia pojazdu weryfikuje się zgodnie z pkt 6.1.1.
Rysunek 1
Schemat metody stosowanej w procedurze badania weryfikacyjnego
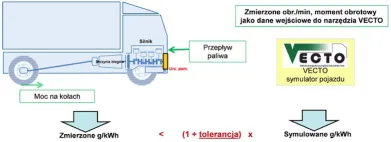
2. Definicje
Do celów niniejszego załącznika stosuje się następujące definicje:
| (1) | »zestaw danych istotny dla badania weryfikacyjnego« oznacza zestaw danych wejściowych dotyczących części, oddzielnych zespołów technicznych i układów oraz informacji wejściowych wykorzystywanych do określania poziomu emisji CO2 przez pojazd istotny dla procedury badania weryfikacyjnego; |
| (2) | »pojazd istotny dla procedury badania weryfikacyjnego« oznacza nowy pojazd, dla którego zgodnie z art. 9 określono i zadeklarowano wartość emisji CO2 i zużycia paliwa; |
| (3) | »skorygowana rzeczywista masa pojazdu« oznacza »skorygowaną rzeczywistą masę pojazdu« zdefiniowaną w pkt 2 ppkt 4 załącznika III; |
| (4) | »rzeczywista masa pojazdu na potrzeby procedury badania weryfikacyjnego« oznacza rzeczywistą masę pojazdu zdefiniowaną w art. 2 pkt 6 rozporządzenia (UE) nr 1230/2012, ale przy pełnym zbiorniku oraz z dodatkowymi urządzeniami pomiarowymi określonymi w pkt 5 (urządzenia pomiarowe), z uwzględnieniem rzeczywistej masy przyczepy lub naczepy, jeżeli wymaga tego pkt 6.1.4.1; |
| (5) | »rzeczywista masa pojazdu na potrzeby procedury badania weryfikacyjnego z obciążeniem użytkowym« oznacza rzeczywistą masę pojazdu na potrzeby procedury badania weryfikacyjnego z obciążeniem użytkowym w ramach procedury badania weryfikacyjnego określonym w pkt 6.1.4.2; |
| (6) | »moc na kołach« oznacza całkowitą moc na kołach napędzanych pojazdu konieczną do przezwyciężenia wszystkich oporów jazdy na kole, którą oblicza się w ramach narzędzia symulacyjnego na podstawie zmierzonego momentu obrotowego i prędkości obrotowej kół napędzanych; |
| (7) | »sygnał magistrali CAN« oznacza sygnał odebrany za pośrednictwem połączenia z elektroniczną jednostką sterującą pojazdu, o której mowa w pkt 2.1.5 dodatku 1 załącznika II do rozporządzenia (UE) nr 582/2011; |
| (8) | »jazda w terenie miejskim« oznacza całkowitą odległość przejechaną podczas pomiaru zużycia paliwa z prędkością nieprzekraczającą 50 km/h; |
| (9) | »jazda w terenie wiejskim« oznacza całkowitą odległość przejechaną podczas pomiaru zużycia paliwa z prędkością przekraczającą 50 km/h, ale nieprzekraczającą 70 km/h; |
| (10) | »jazda po autostradzie« oznacza całkowitą odległość przejechaną podczas pomiaru zużycia paliwa z prędkością powyżej 70 km/h; |
| (11) | »przesłuch« oznacza sygnał w głównym punkcie wyjściowym czujnika (My) wygenerowany przez wielkość mierzoną (Fz) oddziałującą na ten czujnik, który różni się od sygnału generowanego przez wielkość mierzoną przypisaną do tego punktu wyjściowego; układ współrzędnych przyporządkowuje się zgodnie z normą ISO 4130. |
3. Wybór pojazdu
Nowe pojazdy w każdym roku produkcji bada się w takiej liczbie, aby zapewnić, by w procedurze badania weryfikacyjnego uwzględniono istotne różnice w wykorzystywanych częściach, oddzielnych zespołach technicznych lub układach. Pojazdy do badania weryfikacyjnego wybiera się w oparciu o następujące wymagania:
| (a) | Pojazdy, które mają zostać poddane badaniu weryfikacyjnemu, wybiera się spośród pojazdów z linii produkcyjnej, dla której zgodnie z art. 9 określono i zadeklarowano wartość emisji CO2 i zużycia paliwa. Części, oddzielne zespoły techniczne lub układy zamontowane w pojeździe lub na nim muszą pochodzić z produkcji seryjnej i odpowiadać tym, które montuje się w dniu produkcji pojazdu. |
| (b) | Pojazdy wybiera organ udzielający homologacji, który wydał licencję na użytkowanie narzędzia symulacyjnego, na podstawie propozycji producenta pojazdu. |
| (c) | Do badania weryfikacyjnego wybiera się wyłącznie pojazdy z jedną osią napędzaną. |
| (d) | Zaleca się, aby w każdym zestawie danych istotnym dla badania weryfikacyjnego uwzględniono odpowiednie części, których dany producent sprzedaje najwięcej. Części, oddzielne zespoły techniczne lub układy można zweryfikować wszystkie łącznie w jednym pojeździe lub w różnych pojazdach. Oprócz kryterium największej liczby sprzedanych części organ udzielający homologacji, o którym mowa w lit. b), decyduje, czy w badaniu weryfikacyjnym należy uwzględnić inne pojazdy z odpowiednimi zestawami danych dotyczących silnika, osi i przekładni. |
| (e) | Do badania weryfikacyjnego nie wybiera się pojazdów, w przypadku których w certyfikacji CO2 ich części, oddzielnych zespołów technicznych lub układów stosuje się wartości standardowe zamiast zmierzonych wartości dotyczących przekładni i strat na osi, o ile produkuje się pojazdy spełniające wymagania określone w lit. a)-c) i wykorzystujące w certyfikacji CO2 zmierzone mapy strat w odniesieniu do tych części, oddzielnych zespołów technicznych lub układów. |
| (f) | Minimalna liczba różnych pojazdów o różnych kombinacjach zestawów danych istotnych dla badania weryfikacyjnego, które corocznie poddaje się badaniu weryfikacyjnemu, oparta jest na danych producenta pojazdu dotyczących sprzedaży, jak określono w tabeli 1. Tabela 1 Ustalenie minimalnej liczby pojazdów, które producent pojazdu ma poddać badaniu
|
| (g) | Producent pojazdu musi zakończyć badanie weryfikacyjne w ciągu 10 miesięcy od dnia wybrania pojazdu do badania weryfikacyjnego. |
4. Warunki dotyczące pojazdu
Każdy pojazd skierowany do badania weryfikacyjnego musi być w stanie odzwierciedlającym stan, w jakim ma on zostać wprowadzony do obrotu. Nie można wprowadzać żadnych zmian w sprzęcie, np. dodawać smarów, lub w oprogramowaniu, np. korzystać ze sterowników podrzędnych. Opony można wymienić na opony pomiarowe podobnego rozmiaru (± 10 %).
Zastosowanie mają przepisy określone w pkt 3.3-3.6 załącznika II do rozporządzenia (UE) nr 582/2011.
4.1 Dotarcie pojazdu
Dotarcie pojazdu nie jest obowiązkowe. Jeżeli całkowity przebieg badanego pojazdu jest mniejszy niż 15 000 km, w odniesieniu do wyniku badania stosuje się współczynnik rozwoju emisji z wykorzystaniem narzędzia symulacyjnego, jak określono w dodatku 1. Całkowitym przebiegiem badanego pojazdu jest odczyt hodometru na początku pomiaru zużycia paliwa. Maksymalny przebieg pojazdu na początku rozgrzewania wynosi 20 000 km.
4.2 Paliwo i smary
Wszelkie smary muszą być takie same jak smary stosowane podczas wprowadzania pojazdu do obrotu.
Do celów opisanego w pkt 6.1.5 pomiaru zużycia paliwa wykorzystuje się paliwo dostępne na rynku. W przypadku wszelkich sporów używa się odpowiedniego paliwa wzorcowego określonego w załączniku IX do rozporządzenia (UE) nr 582/2011.
Zbiornik paliwa musi być pełny na początku rozgrzewania pojazdu. Tankowanie pojazdu pomiędzy rozpoczęciem rozgrzewania a końcem pomiaru zużycia paliwa jest niedozwolone.
Wartość opałową paliwa wykorzystanego w badaniu weryfikacyjnym ustala się zgodnie z pkt 3.2 załącznika V. Po rozgrzaniu pojazdu należy pobrać partię paliwa ze zbiornika. W przypadku silników dwupaliwowych procedurę tę należy zastosować w odniesieniu do obydwu paliw.
5. Urządzenia pomiarowe
Laboratoryjne urządzenia kalibracyjne muszą spełniać wymagania określone w normie IATF 16949, w serii norm ISO 9000 albo w normie ISO/IEC 17025. Wszystkie laboratoryjne, referencyjne urządzenia pomiarowe wykorzystywane do kalibracji i weryfikacji muszą spełniać wymagania określone w normach krajowych lub międzynarodowych.
5.1 Moment obrotowy kół
Wartość bezpośredniego momentu obrotowego na wszystkich osiach napędzanych mierzy się za pomocą następujących układów pomiarowych spełniających wymagania wymienione w tabeli 2:
| a) | urządzenia do pomiaru momentu obrotowego na piaście koła; |
| b) | urządzenia do pomiaru momentu obrotowego na feldze; |
| c) | urządzenia do pomiaru momentu obrotowego na półosi. |
Odchylenie mierzy się w trakcie badania weryfikacyjnego w drodze wyzerowania układu do pomiaru momentu obrotowego zgodnie z pkt 6.1.5.4 po rozgrzaniu pojazdu zgodnie z pkt 6.1.5.3, w drodze podniesienia osi i ponownego zmierzenia momentu obrotowego przy podniesionej osi bezpośrednio po badaniu weryfikacyjnym zgodnie z pkt 6.1.5.6.
Aby wynik badania był ważny, należy udowodnić, że maksymalne odchylenie (suma wartości bezwzględnych dla obydwu kół) układu do pomiaru momentu obrotowego w procedurze badania weryfikacyjnego wynosi 1,5 % kalibrowanego zakresu pojedynczego urządzenia do pomiaru momentu obrotowego.
5.2 Prędkość pojazdu
Zarejestrowana prędkość pojazdu powinna opierać się na sygnale magistrali CAN.
5.3 Włączony bieg
W przypadku pojazdów z przekładniami SMT i AMT włączony bieg jest obliczany przez narzędzie symulacyjne na podstawie zmierzonej prędkości obrotowej silnika, prędkości pojazdu oraz wymiarów opon i współczynników przełożenia pojazdu zgodnie z dodatkiem 1. Narzędzie symulacyjne pobiera prędkość obrotową silnika z danych wejściowych zgodnie z pkt 5.4.
W przypadku pojazdów z przekładniami APT włączony bieg oraz stan przemiennika momentu obrotowego (aktywny lub nieaktywny) uzyskuje się za pomocą sygnału magistrali CAN.
5.4 Prędkość obrotowa silnika
Prędkość obrotową silnika rejestruje się za pomocą magistrali CAN, OBD lub alternatywnych układów pomiarowych, które spełniają wymagania określone w tabeli 2.
5.5 Prędkość obrotowa kół na osi napędzanej
Prędkość obrotową lewego i prawego koła osi napędzanej rejestruje się za pomocą magistrali CAN lub alternatywnych układów pomiarowych, które spełniają wymagania określone w tabeli 2.
5.6 Prędkość obrotowa wentylatora
W przypadku wentylatorów chłodzących silnik innych niż napędzanych elektrycznie rejestruje się prędkość obrotową wentylatora. Do tego celu wykorzystuje się sygnał magistrali CAN albo czujnik zewnętrzny spełniający wymagania określone w tabeli 2.
W przypadku wentylatorów chłodzących silnik napędzanych elektrycznie rejestruje się wartości natężenia i napięcia prądu stałego pobranego na zacisku silnika elektrycznego lub falownika. Wykorzystując te dwa sygnały, za pomocą mnożenia oblicza się energię elektryczną na zacisku i udostępnia się ją jako rozdzielony w czasie sygnał zawierający dane wejściowe do narzędzia symulacyjnego. W przypadku kilku wentylatorów chłodzących silnik napędzanych elektrycznie udostępnia się sumę energii elektrycznej na zaciskach.
5.7 Układ do pomiaru paliwa
Zużywane paliwo mierzy się w pojeździe za pomocą urządzenia pomiarowego na podstawie jednej z następujących metod pomiarowych:
| - | Pomiar masy paliwa. Urządzenie do pomiaru paliwa musi spełniać wymagania w zakresie dokładności określone w tabeli 2 dla układu do pomiaru masy paliwa. |
| - | Pomiar objętości paliwa wraz z korektą pod kątem rozszerzalności cieplnej paliwa. Urządzenie do pomiaru objętości paliwa oraz urządzenie do pomiaru temperatury paliwa muszą spełniać wymagania w zakresie dokładności określone w tabeli 2 dla układu do pomiaru objętości paliwa. Zmierzone wartości przepływu objętościowego paliwa przekształca się na przepływ masowy paliwa zgodnie z następującymi równaniami: |
m fuel,i = V fuel,i ·ρi
gdzie:
| mfuel, i | = | przepływ masowy paliwa w próbce i [g/h] |
| ρ0 | = | gęstość paliwa wykorzystanego w badaniu weryfikacyjnym w (g/dm3). Gęstość określa się zgodnie z załącznikiem IX do rozporządzenia (UE) nr 582/2011. Jeżeli w badaniu weryfikacyjnym wykorzystuje się olej napędowy, można również wykorzystać średnią wartość zakresu gęstości dla paliw wzorcowych B7 zgodnie z załącznikiem IX do rozporządzenia (UE) nr 582/2011. |
| t0 | = | temperatura paliwa odpowiadająca gęstości ρ0 dla paliwa wzorcowego [°C] |
| ρi | = | gęstość paliwa badawczego dla próbki i [g/dm3] |
| Vfuel, i | = | przepływ objętościowy paliwa w próbce i [dm3/h] |
| ti | = | zmierzona temperatura paliwa dla próbki i [°C] |
| β | = | współczynnik korekcji temperatury (0,001 K-1) |
W przypadku pojazdów dwupaliwowych pomiaru przepływu paliwa dokonuje się oddzielnie w odniesieniu do każdego z dwóch paliw.
5.8 Masa pojazdu
Następujące masy pojazdu mierzy się za pomocą urządzenia spełniającego wymagania określone w tabeli 2:
| (a) | rzeczywista masa pojazdu na potrzeby procedury badania weryfikacyjnego; |
| (b) | rzeczywista masa pojazdu na potrzeby procedury badania weryfikacyjnego z obciążeniem użytkowym; |
5.9 Ogólne wymagania dotyczące pomiarów w pojeździe określonych w pkt 5.1-5.8.
Dane wejściowe określone w pkt 6.1.6. Dane w tabeli 4 podaj się na podstawie pomiarów. Wszystkie dane rejestruje się w częstotliwości co najmniej 2 Hz lub w częstotliwości zalecanej przez producenta danego urządzenia, jeżeli jest to wartość wyższa.
Dane wejściowe do narzędzia symulacyjnego mogą pochodzić z różnych rejestratorów. Moment obrotowy i prędkość obrotową na kołach rejestruje się w jednym systemie rejestrowania danych. Jeżeli w przypadku różnych sygnałów wykorzystuje się odmienne systemy rejestrowania danych, rejestruje się jeden wspólny sygnał, np. prędkość pojazdu, w celu zapewnienia prawidłowego dopasowania czasowego sygnałów. W wyniku dopasowania czasowego sygnałów uzyskuje się najwyższy współczynnik korelacji wspólnego sygnału zarejestrowanego za pomocą różnych rejestratorów danych.
Wszelkie użyte urządzenia pomiarowe muszą spełniać wymagania w zakresie dokładności określone w tabeli 2. Każde urządzenie, którego nie wymieniono w tabeli 2, musi spełniać wymagania w zakresie dokładności określone w tabeli 2 w załączniku V.
Tabela 2
Wymagania dotyczące układów pomiarowych
| Układ pomiarowy | Dokładność | Czas narastania (1) | ||||||||
| Równowaga dla masy pojazdu | 50 kg lub < 0,5 % maks. Kalibracji w zależności, która z tych wartości jest mniejsza | - | ||||||||
| Prędkość obrotowa kół | < 0,5 % odczytu przy 80 km/h | ≤ 1 s | ||||||||
| Przepływ masowy paliwa w przypadku paliw ciekłych (2) | < 1,0 % odczytu lub < 0,2 % maks. kalibracji w zależności, która z tych wartości jest większa | - | ||||||||
| Przepływ masowy paliwa w przypadku paliw gazowych (2) | < 1,0 % odczytu lub < 0,5 % maks. Kalibracji w zależności, która z tych wartości jest większa | - | ||||||||
| Układ do pomiaru objętości paliwa (2) | < 1,0 % odczytu lub < 0,5 % maks. kalibracji w zależności, która z tych wartości jest większa | - | ||||||||
| Temperatura paliwa | ± 1 °C | ≤ 2 s | ||||||||
| Czujnik służący do mierzenia prędkości obrotowej wentylatora chłodzącego | < 0,4 % odczytu lub < 0,2 % maks. kalibracji mocy, w zależności od tego, która z tych wartości jest większa | ≤ 1 s | ||||||||
| Napięcie | < 2 % odczytu lub < 1 % maks. kalibracji mocy, w zależności od tego, która z tych wartości jest większa | ≤ 1 s | ||||||||
| Prąd | < 2 % odczytu lub < 1 % maks. kalibracji mocy, w zależności od tego, która z tych wartości jest większa | ≤ 1 s | ||||||||
| Prędkość obrotowa silnika | Zgodnie z załącznikiem V. W przypadku pojazdów z systemem wyłączania-włączania silnika należy zweryfikować, czy prędkość obrotową silnika zarejestrowano także w odniesieniu do prędkości poniżej biegu jałowego. | |||||||||
| Moment obrotowy kół | W przypadku kalibracji 10 kNm (w całym zakresie kalibracji):
| < 0,1 s | ||||||||
Wartości maksymalnej kalibracji są maksymalnymi wartościami oczekiwanymi w przypadku danego układu pomiarowego w ramach wszystkich przebiegów badawczych, pomnożonymi przez dowolny czynnik większy niż 1 i mniejszy niż lub równy 2. Na potrzeby układu pomiarowego momentu obrotowego maksymalna kalibracja może być ograniczona do 10 kNm.
W przypadku silników dwupaliwowych wartość maksymalnej kalibracji dla układu pomiarowego przepływu masowego paliwa lub objętości paliwa określa się zgodnie z wymaganiami określonymi w pkt 3.5 załącznika V. Jeżeli chodzi o objętość paliwa, maksymalną wartość kalibracji wyznacza się, dzieląc maksymalne wartości kalibracji w odniesieniu do masowego przepływu paliwa przez wartość gęstości ρ0 określoną zgodnie z pkt 5.7.
Podanej dokładności dochowuje się, wykorzystując wszystkie pojedyncze dokładności, jeżeli zastosowano więcej niż jedną skalę.
5.10. Moment obrotowy silnika
Moment obrotowy silnika rejestruje się w ramach procedury badania weryfikacyjnego na potrzeby oceny emisji zanieczyszczeń. Sygnał powinien być zgodny z przepisami określonymi w odniesieniu do momentu obrotowego silnika w tabeli 1 w pkt 2.2 dodatku 1 do załącznika II do rozporządzenia (UE) nr 582/2011.
5.11. Emisje zanieczyszczeń
Do pomiaru emisji zanieczyszczeń wykorzystuje się oprzyrządowanie i procedury określone w dodatkach 1-4 do załącznika II do rozporządzenia (UE) nr 582/2011. W wyniku oceny danych uzyskuje się natychmiastowe masowe przepływy emisji określone w tabeli 4 w pkt 6.1.6 służące jako dane wejściowe do narzędzia symulacyjnego.
Na podstawie tych sygnałów wejściowych narzędzie symulacyjne automatycznie oblicza emisje zanieczyszczeń w stanie zatrzymania mierzone podczas badania weryfikacyjnego (BSEM), określone w części B dodatku 1 do niniejszego załącznika. Następnie wyniki te są automatycznie zapisywane w danych wyjściowych narzędzia symulacyjnego zgodnie z pkt 8.13.14. Dodatkowe wymagania określone w rozporządzeniu (UE) nr 582/2011 dotyczące oceny danych (np. okna oparte na pracy, okna średniej ruchomej), rozpoczęcia badania i przejazdu nie mają zastosowania.
Kryteria dopuszczenia/niedopuszczenia dotyczące emisji zanieczyszczeń nie mają zastosowania w procedurze badania weryfikacyjnego.
6. Procedura badania
6.1 Przygotowanie pojazdu
Pojazd pochodzi z produkcji seryjnej i wybiera się go zgodnie z pkt 3.
6.1.1 Weryfikacja informacji wejściowych i danych wejściowych oraz przetwarzanie danych
Podstawą do weryfikacji danych wejściowych jest dokumentacja producenta wybranego pojazdu oraz dokumentacja informacyjna przeznaczona dla klientów. Numer identyfikacyjny wybranego pojazdu jest taki sam, jak numer identyfikacyjny pojazdu w dokumentacji producenta i dokumentacji informacyjnej przeznaczonej dla klientów.
Na wniosek organu udzielającego homologacji, który wydał licencję na użytkowanie narzędzia symulacyjnego, producent pojazdu dostarcza w ciągu 15 dni roboczych dokumentacją producenta, informacje i dane wejściowe niezbędne do działania narzędzia symulacyjnego oraz świadectwo dotyczące właściwości powiązanych z emisjami CO2 i zużyciem paliwa dla wszystkich istotnych części, oddzielnych zespołów technicznych lub układów.
6.1.1.1 Weryfikacja części, oddzielnych zespołów technicznych lub układów oraz danych i informacji wejściowych
W odniesieniu do części, oddzielnych zespołów technicznych i układów montowanych na pojeździe przeprowadza się następujące kontrole:
| (a) | integralność danych narzędzia symulacyjnego: integralność skrótu kryptograficznego dokumentacji producenta zgodnie z art. 9 ust. 3, ponownie obliczonego w trakcie procedury badania weryfikacyjnego za pomocą narzędzia haszującego, weryfikuje się poprzez porównanie ze skrótem kryptograficznym w świadectwie zgodności; |
| (b) | dane dotyczące pojazdu: numer identyfikacyjny pojazdu, konfiguracja osi, wybrane urządzenia pomocnicze oraz technologia przystawki odbioru mocy, wyłączone biegi zgodnie z pkt 6.2 załącznika III oraz wymagania dotyczące aktywnych urządzeń aerodynamicznych określonych w pkt 3.3.1.5 załącznika VIII są zgodne z wybranym pojazdem; |
| (c) | Ograniczenia momentu obrotowego silnika zadeklarowane w danych wejściowych do narzędzia symulacyjnego podlegają weryfikacji w ramach procedury badania weryfikacyjnego, jeżeli zadeklarowano je w odniesieniu do dowolnego z najwyższych 50 % biegów (np. w odniesieniu do dowolnego z biegów od 7 do 12 w 12-biegowej przekładni) oraz gdy zastosowanie ma jeden z następujących przypadków:
W przypadku każdego ograniczenia momentu obrotowego podlegającego weryfikacji należy wykazać, że 99 % percentyl momentu obrotowego silnika zarejestrowanego podczas pomiaru zużycia paliwa na odpowiednim biegu nie przekracza zadeklarowanego ograniczenia momentu obrotowego o więcej niż 5 %. W tym celu badanie weryfikacyjne obejmuje fazy pełnego otwarcia przepustnicy na odpowiednich biegach. Weryfikację należy przeprowadzić na podstawie zarejestrowanego momentu obrotowego silnika, jak określono w pkt 5.10. Weryfikację ograniczenia momentu obrotowego silnika można również przeprowadzić wyłącznie jako oddzielne badanie obejmujące dedykowane przyspieszenia przy pełnym obciążeniu, bez żadnych innych zobowiązań dotyczących oceny badania. |
| (d) | dane dotyczące części, oddzielnych zespołów technicznych lub układów: numer certyfikacji i typ modelu znajdujące się na świadectwie dotyczącym właściwości powiązanych z emisjami CO2 i zużyciem paliwa muszą być zgodne z częścią, oddzielnym zespołem technicznym lub układem zamontowanymi w wybranym pojeździe; |
| (e) | Skrót danych wejściowych i informacji wejściowych w narzędziu symulacyjnym musi być zgodny ze skrótem naniesionym na świadectwie dotyczącym właściwości powiązanych z emisjami CO2 i zużyciem paliwa w odniesieniu do następujących części, oddzielnych zespołów technicznych lub układów:
|
6.1.1.2 Weryfikacja masy pojazdu
Na żądanie organu udzielającego homologacji, który wydał licencję na użytkowanie narzędzia symulacyjnego, masy określone przez producenta weryfikuje się zgodnie z pkt 2 dodatku 2 do załącznika I do rozporządzenia (UE) nr 1230/2012. Jeżeli weryfikacja ta wykaże niezgodność, określa się skorygowaną rzeczywistą masę zdefiniowaną w pkt 2 ppkt 4 załącznika III do niniejszego rozporządzenia.
6.1.1.3 Działania, które należy podjąć
W przypadku rozbieżności dotyczących numeru certyfikacji lub skrótu kryptograficznego w jednym lub większej liczbie dokumentów dotyczących części, oddzielnych zespołów technicznych lub układów wymienionych w pkt 6.1.1.1 lit. e) ppkt (1)-(8) we wszystkich dalszych działaniach poprawna dokumentacja zawierająca dane wejściowe i spełniająca wymogi w pkt 6.1.1.1 i 6.1.1.2 musi zastąpić dane błędne. Te same przepisy mają zastosowanie do wszelkich innych nieprawidłowych informacji określonych w pkt 6.1.1.1 lit. b) i c).
Jeżeli weryfikacja wyników w dokumentacji producenta oraz w dokumentacji informacyjnej przeznaczonej dla klientów wykaże niezgodność lub żaden kompletny zestaw danych wejściowych zawierających poprawne świadectwa dotyczące właściwości powiązanych z emisjami CO2 i zużyciem paliwa nie jest dostępny w odniesieniu do części, oddzielnych zespołów technicznych lub układów wymienionych w pkt 6.1.1.1 lit. e) ppkt (1)-(8), badanie weryfikacyjne zostaje zakończone, a pojazd otrzymuje wynik negatywny w procedurze badania weryfikacyjnego.
6.1.2 Faza dotarcia
Można przeprowadzić fazę dotarcia do maksimum 15 000 km w odczycie hodometru. W przypadku uszkodzenia którychkolwiek części, oddzielnych zespołów technicznych lub układów wymienionych w pkt 6.1.1.1, części, oddzielne zespoły techniczne lub układy można zastąpić równoważnymi częściami, oddzielnymi zespołami technicznymi lub układami z takim samym numerem certyfikacji. Wymianę dokumentuje się w sprawozdaniu z badań.
Przed dokonaniem pomiarów sprawdza się wszystkie istotne części, oddzielne zespoły techniczne lub układy, aby wykluczyć nietypowe okoliczności, takie jak nieprawidłowe poziomy napełnienia olejem, zatkane filtry powietrza lub ostrzeżenia pokładowego układu diagnostycznego.
6.1.3 Przygotowanie urządzeń pomiarowych
Wszystkie układy pomiarowe kalibruje się zgodnie z instrukcjami producenta urządzeń. W przypadku braku jakichkolwiek instrukcji podczas kalibracji przestrzega się zaleceń producenta urządzeń.
Po fazie dotarcia pojazd wyposaża się w układy pomiarowe określone w pkt 5.
6.1.4 Przygotowanie badanego pojazdu do pomiaru zużycia paliwa
6.1.4.1 Konfiguracja pojazdu
Ciągniki z grup pojazdów określonych w tabeli 1 i 2 w załączniku I bada się z dowolnym rodzajem naczepy, pod warunkiem że można zastosować obciążenie użytkowe określone poniżej.
Samochody ciężarowe jednoczłonowe z grup pojazdów określonych w tabeli 1 i 2 w załączniku I bada się z przyczepą, jeżeli zamontowano połączenie przyczepy. Można zastosować dowolny rodzaj nadwozia lub inne urządzenie służące do przenoszenia obciążenia użytkowego określone w pkt 6.1.4.2. Nadwozia samochodów ciężarowych jednoczłonowych mogą się różnić od standardowych rodzajów nadwozia określonych w pkt 2 dodatku 4 do załączniku VIII.
Samochody dostawcze z grup pojazdów określonych w tabeli 2 w załączniku I bada się z ostatecznymi nadwoziami pojazdu kompletnego lub skompletowanego.
6.1.4.2 Obciążenie użytkowe pojazdu
W przypadku ciężkich samochodów ciężarowych grupy 4 i wyższych obciążenie użytkowe pojazdu ustawia się co najmniej tak, aby było równe masie, w wyniku której całkowita masa badania wynosi 90 % maksymalnej dopuszczalnej zgodnej z dyrektywą 96/53/WE (*) masy określonego pojazdu lub zespołu pojazdów.
W przypadku ciężkich samochodów ciężarowych grupy 1s, 1, 2 i 3 oraz średnich samochodów ciężarowych obciążenie użytkowe pojazdu ustawia się w przedziale 55-75 % maksymalnej dopuszczalnej zgodnej z dyrektywą 96/53/WE* masy określonego pojazdu lub zespołu pojazdów.
6.1.4.3 Ciśnienie napompowania opony
Ciśnienie w oponach ustawia się zgodnie z zaleceniami producenta przy maksymalnym odchyleniu mniejszym niż 10 %. Opony naczepy mogą się różnić od standardowych opon określonych w tabeli 2 w części B załącznika II do rozporządzenia (WE) nr 661/2009 na potrzeby certyfikacji CO2 dotyczącej opon.
6.1.4.4 Ustawienia urządzeń pomocniczych
Wszystkie ustawienia, które mają wpływ na zapotrzebowanie urządzeń pomocniczych na energię, ustala się w stosownych przypadkach na poziomie minimalnego rozsądnego zużycia energii. Klimatyzacja jest wyłączona, a wentylacja kabiny jest ustawiona na poziomie niższym niż średni przepływ masowy. Dodatkowe urządzenia zużywające energię, które nie są niezbędne do działania pojazdu, są wyłączone. Zewnętrzne urządzenia, które znajdują się w pojeździe, służące do dostarczenia energii, takie jak zewnętrzne baterie, można wykorzystywać jedynie do zasilania dodatkowych urządzeń pomiarowych stosowanych w procedurze badania weryfikacyjnego wymienionych w tabeli 2, ale nie mogą one dostarczać energii do wyposażenia pojazdu, które będzie obecne w momencie dopuszczenia pojazdu do obrotu.
6.1.4.5 Regeneracja filtra cząsteczek
W stosownych przypadkach przed badaniem weryfikacyjnym filtr cząsteczek poddaje się regeneracji. Zastosowanie ma pkt 4.6.10 załącznika II do rozporządzenia (UE) nr 582/2011.
6.1.5 Badanie weryfikacyjne
6.1.5.1 Wybór trasy
Trasa wybrana do celów badania weryfikacyjnego musi spełniać wymagania określone w tabeli 3. Trasy mogą obejmować zarówno tory publiczne, jak i prywatne.
6.1.5.2 Wstępne przygotowanie pojazdu
Dopuszczalne jest wyłącznie wstępne przygotowanie pojazdu zgodne z pkt 6.1.5.3.
6.1.5.3 Rozgrzewanie pojazdu
Przed rozpoczęciem pomiaru zużycia paliwa pojazd odbywa jazdę rozgrzewającą, jak określono w tabeli 3. W ocenie badania weryfikacyjnego nie uwzględnia się fazy rozgrzewania.
Przed rozpoczęciem rozgrzewania analizatory PEMS sprawdza się i kalibruje zgodnie z procedurami określonymi w dodatku 1 do załącznika II do rozporządzenia (UE) nr 582/2011.
6.1.5.4 Zerowanie urządzeń do pomiaru momentu obrotowego
Urządzenia do pomiaru momentu obrotowego zeruje się w następujący sposób:
| - | pojazd należy zatrzymać; |
| - | należy unieść oprzyrządowane kół z podłoża w taki sposób, aby koła mogły się swobodnie obracać i aby do czujnika momentu obrotowego nie był przyłożony zewnętrzny moment obrotowy; |
| - | należy wyzerować odczyty wzmacniaczy urządzeń do pomiaru momentu obrotowego. Zerowanie należy zakończyć przed upływem 20 minut. |
6.1.5.5 Pomiar zużycia paliwa i rejestracja sygnałów emisji zanieczyszczeń
Pomiar zużycia paliwa rozpoczyna się bezpośrednio po zerowaniu urządzeń do pomiaru momentu obrotowego kół - pojazd wtedy stoi. Podczas pomiaru pojazd prowadzi się, unikając niepotrzebnego hamowania pojazdu, nadużywania pedału gazu i ostrego wchodzenia w zakręty. Stosuje się ustawienia nowoczesnych systemów wspomagania kierowcy, które ładują się automatycznie w momencie uruchomienia pojazdu kluczykiem, zmian biegów dokonuje układ automatyczny (w przypadku przekładni AMT lub APT), a także stosuje się tempomat (w stosownych przypadkach). Czas trwania pomiaru zużycia paliwa musi się mieścić w zakresie tolerancji określonym w tabeli 3. Zakończenie pomiaru zużycia paliwa również następuje w momencie, kiedy pojazd znajduje się w stanie postoju, bezpośrednio przed pomiarem odchylenia urządzeń do pomiaru momentu obrotowego.
Rejestrowanie sygnałów istotnych dla oceny emisji zanieczyszczeń rozpoczyna się najpóźniej z chwilą rozpoczęcia pomiaru zużycia paliwa i kończy się wraz z pomiarem zużycia paliwa.
Jako dane wejściowe do narzędzia symulacyjnego należy podać całą sekwencję badania, począwszy od ostatniego punktu czasu 0,5 s fazy postoju po wyzerowaniu urządzeń do pomiaru momentu obrotowego, a skończywszy na pierwszym punkcie czasu 0,5 s końcowej fazy postoju.
6.1.5.6 Pomiar odchylenia urządzeń do pomiaru momentu obrotowego
Bezpośrednio po pomiarze zużycia paliwa rejestruje się odchylenie urządzeń do pomiaru momentu obrotowego, dokonując pomiaru momentu obrotowego w tych samych warunkach dotyczących pojazdu, które miały miejsce podczas procesu zerowania. Jeżeli pomiar zużycia paliwa zakończy się przed postojem na potrzeby przeprowadzenia pomiaru odchylenia, dokonuje się zatrzymania pojazdu w celu przeprowadzenia pomiaru odchylenia w ciągu 5 minut. Odchylenie poszczególnych urządzeń do pomiaru momentu obrotowego oblicza się na podstawie średniej z sekwencji trwającej minimalnie 10 sekund.
Bezpośrednio po tym przeprowadza się weryfikację pomiarów emisji zgodnie z procedurami określonymi w pkt 2.7 dodatku 1 do załącznika II do rozporządzenia (UE) nr 582/2011.
6.1.5.7 Warunki brzegowe badania weryfikacyjnego
Warunki brzegowe, które należy spełnić, aby badanie weryfikacyjne było ważne, określono w tabelach 3-3b.
Jeżeli pojazd przejdzie badanie weryfikacyjne zgodnie z pkt 7.3, badanie uznaje się za ważne, nawet jeżeli nie zostaną spełnione następujące warunki:
| - | podcięcie minimalnych wartości w odniesieniu do parametru nr 1, 2, 6 i 9; |
| - | przekroczenie maksymalnych wartości w odniesieniu do parametrów nr 3, 4, 5, 7, 8, 10 i 12; |
| - | przekroczenie maksymalnych wartości w odniesieniu do parametru nr 7, jeżeli całkowity czas badania, który nie jest czasem postoju, przekracza 80 min. |
Tabela 3
Wartości parametrów niezbędne do uznania badania weryfikacyjnego za ważne dla wszystkich grup pojazdów
| Nr | Parametr | Min. | Maks. |
| 1 | Rozgrzewanie [minuty] | 60 |
|
| 2 | Średnia prędkość podczas rozgrzewania [km/h] | 70 (5) | 100 |
| 3 | Czas trwania pomiaru zużycia paliwa [minuty] | 80 | 120 |
| 8 | Średnia temperatura otoczenia | 5o C | 30o C |
| 9 | Stan drogi - suchy | 100 % |
|
| 10 | Stan drogi - śnieg lub lód |
| 0 % |
| 11 | Wysokość trasy nad poziomem morza [m] |
| 800 |
| 12 | Czas nieprzerwanego postoju na biegu jałowym [minuty] |
| 3 |
Tabela 3a
Wartości parametrów niezbędne do uznania badania weryfikacyjnego za ważne dla grup pojazdów 4, 5, 9, 10
| Nr | Parametr | Min. | Maks. |
| 4 | Udział jazdy w terenie miejskim w oparciu o odległość | 2 % | 8 % |
| 5 | Udział jazdy w terenie wiejskim w oparciu o odległość | 7 % | 13 % |
| 6 | Udział jazdy po autostradzie w oparciu o odległość | 79 % | - |
| 7 | Czasowy udział postoju na biegu jałowym |
| 5 % |
Tabela 3b
Wartości parametrów niezbędne do uznania badania weryfikacyjnego za ważne dla innych ciężkich i średnich samochodów ciężarowych
| Nr | Parametr | Min. | Maks. |
| 4 | Udział jazdy w terenie miejskim w oparciu o odległość | 10 % | 50 % |
| 5 | Udział jazdy w terenie wiejskim w oparciu o odległość | 15 % | 25 % |
| 6 | Udział jazdy po autostradzie w oparciu o odległość | 25 % | - |
| 7 | Czasowy udział postoju na biegu jałowym |
| 10 % |
W przypadku wystąpienia nadzwyczajnych warunków drogowych badanie weryfikacyjne musi być powtórzone.
6.1.6 Przekazywanie danych
Dane zarejestrowane podczas procedury badania weryfikacyjnego przekazuje się do organu udzielającego homologacji, który wydał licencję na użytkowanie narzędzia symulacyjnego, w sposób następujący:
Zarejestrowane dane przekazuje się jako stałe sygnały 2 Hz, jak określono w tabeli 4. Dane zarejestrowane na częstotliwościach wyższych niż 2 Hz przetwarza się na 2 Hz, uśredniając przedziały czasowe w odniesieniu do węzłów 2 Hz. W przypadku np. pobierania próbek w częstotliwości 10 Hz pierwszy węzeł 2 Hz określa się za pomocą średniej zakresu 0,1-0,5 sekundy, a drugi węzeł określa się za pomocą średniej zakresu 0,6-1,0 sekundy. Znacznikiem czasu poszczególnych węzłów będzie ostatni znacznik czasu w danym węźle, tj. 0,5, 1,0, 1,5 itp.
Tabela 4
Format przekazywania danych dotyczący zmierzonych danych do narzędzia symulacyjnego w badaniu weryfikacyjnym
| Ilość | Jednostka | Nagłówek danych wejściowych | Uwaga |
| węzeł czasu | [s] | <t> |
|
| prędkość pojazdu | [km/h] | <v> |
|
| prędkość obrotowa silnika | [obr./min] | <n_eng> |
|
| prędkość wentylatora chłodzącego silnik | [obr./min] | <n_fan> | W przypadku wentylatorów chłodzących silnik napędzanych inaczej niż elektrycznie |
| moc elektryczna wentylatora chłodzącego silnik | [W] | <Pel_fan> | W przypadku wentylatorów chłodzących silnik napędzanych elektrycznie |
| moment obrotowy lewego koła | [Nm] | <tq_wh_left> |
|
| moment obrotowy prawego koła | [Nm] | <tq_wh_right> |
|
| prędkość obrotowa lewego koła | [obr./min] | <n_wh_left> |
|
| prędkość obrotowa prawego koła | [obr./min] | <n_wh_right> |
|
| bieg | [-] | <gear> | obowiązkowy w przypadku przekładni APT |
| Aktywny przemiennik momentu obrotowego | [-] | <TC_active> | 0 = nieaktywny (zablokowany); 1 = aktywny (odblokowany); obowiązkowy w przypadku przekładni AT, nie dotyczy innych typów przekładni |
| przepływ paliwa | [g/h] | <fc_X> | Przepływ masowy paliwa zgodnie z pkt 5.7 (6). W nagłówku »X« podaje się rodzaj paliwa zgodnie z tabelą 2 w dodatku 7 do załącznika V do niniejszego rozporządzenia, np. »<fc_Diesel CI>«. W przypadku silników dwupaliwowych przeznacza się osobną kolumnę na każdy rodzaj paliwa. |
| Moment obrotowy silnika | [Nm] | <tq_eng> | Moment obrotowy silnika zgodnie z pkt 5.10. |
| Przepływ masowy CH4 | [g/s] | <CH4> | Wyłącznie gdy pomiar tej części należy przeprowadzić zgodnie z pkt 1 dodatku 1 do załącznika II do rozporządzenia (UE) nr 582/2011. |
| Przepływ masowy CO | [g/s] | <CO> |
|
| Przepływ masowy NMHC | [g/s] | <NMHC> | Wyłącznie gdy pomiar tej części należy przeprowadzić zgodnie z pkt 1 dodatku 1 do załącznika II do rozporządzenia (UE) nr 582/2011. |
| Przepływ masowy NOx | [g/s] | <NOx> |
|
| Przepływ masowy THC | [g/s] | <THC> | Wyłącznie gdy pomiar tej części należy przeprowadzić zgodnie z pkt 1 dodatku 1 do załącznika II do rozporządzenia (UE) nr 582/2011. |
| Przepływ liczby cząstek stałych | [#/s] | <PN> |
|
| przepływ masowy CO2 | [g/s] |
|
|
Ponadto przekazuje się dane określone w tabeli 4a. Dane te wprowadza się bezpośrednio do graficznego interfejsu użytkownika w narzędziu symulacyjnym podczas oceny procedury badania weryfikacyjnego.
Tabela 4a
Format przekazywania danych dotyczący dalszych informacji do narzędzia symulacyjnego w badaniu weryfikacyjnym
| Ilość | Jednostka | Uwaga |
| Zmierzona wartość opałowa | [MJ/kg] | Wartość opałowa paliwa wykorzystanego w badaniu weryfikacyjnym, ustalona zgodnie z pkt 3.2 załącznika V. Te dane wejściowe należy podać w odniesieniu do wszystkich rodzajów paliwa, tj. także w przypadku silników Diesla (7). W przypadku silników dwupaliwowych należy podać wartości w odniesieniu do obydwu rodzajów paliwa. |
| Odległość dotarcia | [km] | Zgodnie z pkt 6.1.2 Na podstawie tych danych narzędzie symulacyjne koryguje zmierzone zużycie paliwa zgodnie z dodatkiem 1. |
| Średnica wentylatora | [mm] | Średnica wentylatora chłodzącego silnik Te dane wejściowe nie dotyczą wentylatorów chłodzących silnik napędzanych elektrycznie |
| Odchylenie urządzenia do pomiaru momentu obrotowego (lewe koło) | [Nm] | Średnie odczyty urządzenia do pomiaru momentu obrotowego ustalone zgodnie z pkt 6.1.5.6. |
| Odchylenie urządzenia do pomiaru momentu obrotowego (prawe koło) | [Nm] |
7. Ocena badania
7.1. Dane wejściowe do narzędzia symulacyjnego
| (1) | Należy udostępnić następujące dane wejściowe do narzędzia symulacyjnego: dane wejściowe i informacje wejściowe; |
| (2) | dokumentacja producenta; |
| (3) | dokumentacja informacyjna przeznaczona dla klientów; |
| (4) | przetworzone dane pomiarowe zgodnie z tabelą 4; |
| (5) | dalsze informacje zgodnie z tabelą 4a. |
7.2. Etapy oceny wykonywane przez narzędzie symulacyjne
7.2.1. Weryfikacja procesu przetwarzania danych
Narzędzie symulacyjne przeprowadza ponowną symulację emisji CO2 i zużycia paliwa na podstawie informacji i danych wejściowych określonych w pkt 7.1 oraz weryfikuje odpowiednie wyniki w dokumentacji producenta i dokumentacji informacyjnej przeznaczonej dla klientów dostarczonej przez producenta.
W przypadku jakichkolwiek odchyleń zastosowanie mają działania naprawcze, o których mowa w art. 23.
7.2.2. Określenie współczynnika CVTP
W ocenie badania porównuje się emisje CO2 podczas pomiaru z symulowanymi emisjami CO2. Do celów tego porównania stosunek emisji CO2 zmierzonych i symulowanych w stanie zatrzymania w odniesieniu do całkowitego przejazdu mającego znaczenie dla badania weryfikacyjnego (CVTP) oblicza się za pomocą narzędzia symulacyjnego za pomocą następującego równania:

gdzie:
| CVTP | = | stosunek emisji CO2 zmierzonych i symulowanych w procedurze badania weryfikacyjnego (»współczynnik CVTP«) |
| n | = | liczba rodzajów paliwa (2 w przypadku silników dwupaliwowych, w przeciwnym razie 1) |
| CO2i | = | ogólny współczynnik emisji CO2 (gramów CO2 na gram paliwa) dla określonego rodzaju paliwa stosowanego w narzędziu symulacyjnym. |
| BSFCm-c | = | zużycie paliwa w stanie zatrzymania zmierzone i skorygowane w fazie dotarcia, obliczane zgodnie z dodatkiem 1 część A pkt 2 [g/kWh] |
| BSFCsim | = | zużycie paliwa w stanie zatrzymania określone przez narzędzie symulacyjne zgodnie z dodatkiem 1 część A pkt 3 [g/kWh] |
7.3. Sprawdzenie, czy wynik jest pozytywny/negatywny
Pojazd otrzymuje w badaniu weryfikacyjnym wynik pozytywny, jeżeli współczynnik CVTP określony zgodnie z pkt 7.2.2 jest równy lub mniejszy od tolerancji określonej w tabeli 5.
Aby porównać zadeklarowane emisje CO2 pojazdu zgodnie z art. 9, zweryfikowane emisje CO2 pojazdu określa się w następujący sposób:
CO2verified = CVTP × CO2declared
gdzie:
| CO2verified | = | zweryfikowane emisje CO2 pojazdu w [g/t-km] |
| CO2declared | = | zadeklarowane emisje CO2 pojazdu w [g/t-km] |
Jeżeli pierwszy pojazd nie zmieści się w tolerancjach dotyczących CVTP, na wniosek producenta pojazdu można przeprowadzić dwa kolejne badania na tym samym pojeździe lub można zbadać dwa podobne pojazdy. Do oceny spełnienia kryterium uzyskania wyniku pozytywnego określonego w tabeli 5 wykorzystuje się średnie poszczególnych współczynników CVTP z maksymalnie trzech badań. Jeżeli kryterium uzyskania wyniku pozytywnego nie jest spełnione, pojazd uzyskuje wynik negatywny w procedurze badania weryfikacyjnego.
Tabela 5
Kryterium uzyskania wyniku pozytywnego/negatywnego w badaniu weryfikacyjnym
| Kryterium uzyskania wyniku pozytywnego w procedurze badania weryfikacyjnego | Współczynnik CVTP ≤ 1,075 |
W przypadku gdy współczynnik CVTP jest mniejszy niż 0,925, wyniki należy przekazać Komisji do dalszej analizy w celu ustalenia przyczyny.
8 Procedury sprawozdawcze
Producent pojazdu przygotowuje sprawozdanie z badań dla każdego zbadanego pojazdu; zawiera ono co najmniej następujące wyniki badania weryfikacyjnego:
| 8.1. | Informacje ogólne |
| 8.1.1. | Nazwa i adres producenta pojazdu |
| 8.1.2. | Nazwa i adres zakładu montażowego (zakładów montażowych) |
| 8.1.3. | Nazwa, adres, numer telefonu i faksu oraz adres poczty elektronicznej przedstawiciela producenta pojazdu |
| 8.1.4. | Typ i opis handlowy |
| 8.1.5. | Kryteria wyboru pojazdu i części istotnych dla emisji CO2 (tekst) |
| 8.1.6. | Właściciel pojazdu |
| 8.1.7. | Odczyt hodometru przy rozpoczęciu pomiaru zużycia paliwa (km) |
| 8.2. | Informacje dotyczące pojazdu |
| 8.2.1. | Model pojazdu/nazwa handlowa |
| 8.2.2. | Numer identyfikacyjny pojazdu (VIN) |
| 8.2.2.1. | W przypadku gdy badanie przeprowadzono w następstwie sytuacji, w której pierwsze badanie pojazdu zakończyło się przekroczeniem tolerancji, o których mowa w pkt 7.3, numer identyfikacyjny pojazdu (VIN) pojazdu badanego jako pierwszy |
| 8.2.3. | Kategoria pojazdu (N2, N3) |
| 8.2.4. | Konfiguracja osi |
| 8.2.5. | Technicznie dopuszczalna maksymalna masa całkowita pojazdu (t) |
| 8.2.6. | Grupa pojazdów |
| 8.2.7. | Skorygowana rzeczywista masa pojazdu (kg) |
| 8.2.8. | Skrót kryptograficzny dokumentacji producenta |
| 8.2.9. | Całkowita łączna masa zespołu pojazdów w badaniu weryfikacyjnym (kg) |
| 8.2.10. | Masa w stanie gotowym do jazdy |
| 8.3. | Najważniejsze specyfikacje silnika |
| 8.3.1. | Model silnika |
| 8.3.2. | Numer certyfikacji silnika |
| 8.3.3. | Moc znamionowa silnika (kW) |
| 8.3.4. | Pojemność silnika (l) |
| 8.3.5. | Rodzaj paliwa wzorcowego silnika (olej napędowy/gaz płynny (LPG)/sprężony gaz ziemny itp.) |
| 8.3.6. | Skrót pliku/dokumentu zawierającego mapę paliwa |
| 8.4. | Najważniejsze specyfikacje przekładni |
| 8.4.1. | Model przekładni |
| 8.4.2. | Numer certyfikacji przekładni |
| 8.4.3. | Opcja najczęściej wykorzystywana do stworzenia map strat (Opcja1/Opcja2/Opcja3/Wartości standardowe) |
| 8.4.4. | Typ przekładni |
| 8.4.5. | Liczba biegów |
| 8.4.6. | Współczynnik przełożenia całkowitego na najwyższym biegu |
| 8.4.7. | Typ zwalniacza |
| 8.4.8. | Przystawka odbioru mocy (tak/nie) |
| 8.4.9. | Skrót pliku/dokumentu zawierającego mapę sprawności |
| 8.5. | Najważniejsze specyfikacje zwalniacza |
| 8.5.1. | Model zwalniacza |
| 8.5.2. | Numer certyfikacji zwalniacza |
| 8.5.3. | Opcja certyfikacji stosowana do generowania mapy strat (wartości standardowe/pomiar) |
| 8.5.4. | Skrót pliku/dokumentu zawierającego mapę sprawności zwalniacza |
| 8.6. | Specyfikacja przemiennika momentu obrotowego |
| 8.6.1. | Model przemiennika momentu obrotowego |
| 8.6.2. | Numer certyfikacji przemiennika momentu obrotowego |
| 8.6.3. | Opcja certyfikacji stosowana do generowania mapy strat (wartości standardowe/pomiar) |
| 8.6.4. | Skrót pliku/dokumentu zawierającego mapę sprawności |
| 8.7. | Specyfikacje napędu kątowego |
| 8.7.1. | Model napędu kątowego |
| 8.7.2. | Numer certyfikacji osi |
| 8.7.3. | Opcja certyfikacji stosowana do generowania mapy strat (wartości standardowe/pomiar) |
| 8.7.4. | Przełożenie napędu kątowego |
| 8.7.5. | Skrót pliku/dokumentu zawierającego mapę sprawności |
| 8.8. | Specyfikacje osi |
| 8.8.1. | Model osi |
| 8.8.2. | Numer certyfikacji osi |
| 8.8.3. | Opcja certyfikacji stosowana do generowania mapy strat (wartości standardowe/pomiar) |
| 8.8.4. | Typ osi (np. standardowa, pojedyncza oś napędzana) |
| 8.8.5. | Przełożenie osi |
| 8.8.6. | Skrót pliku/dokumentu zawierającego mapę sprawności |
| 8.9. | Aerodynamika |
| 8.9.1. | Model |
| 8.9.2. | Opcja certyfikacji stosowana do generowania CdxA (wartości standardowe / pomiar) |
| 8.9.3. | Numer certyfikacji CdxA (w stosownych przypadkach) |
| 8.9.4. | Wartość CdxA |
| 8.9.5. | Skrót pliku/dokumentu zawierającego mapę sprawności |
| 8.10. | Najważniejsze specyfikacje opony |
| 8.10.1. | Numer certyfikacji opon na wszystkich osiach |
| 8.10.2. | Określony współczynnik oporu toczenia wszystkich opon na wszystkich osiach |
| 8.11. | Najważniejsze specyfikacje systemów pomocniczych |
| 8.11.1. | Technologia wentylatora chłodzącego silnik |
| 8.11.1.1. | Średnica wentylatora chłodzącego silnik |
| 8.11.2. | Technologia pompy wspomagania |
| 8.11.3. | Technologia układu elektrycznego |
| 8.11.4. | Technologia układu pneumatycznego |
| 8.12. | Warunki badania |
| 8.12.1. | Rzeczywista masa pojazdu na potrzeby procedury badania weryfikacyjnego (kg) |
| 8.12.2. | Rzeczywista masa pojazdu na potrzeby procedury badania weryfikacyjnego z obciążeniem użytkowym (kg) |
| 8.12.3. | Czas rozgrzewania (minuty) |
| 8.12.4. | Średnia prędkość podczas rozgrzewania (km/h) |
| 8.12.5. | Czas trwania pomiaru zużycia paliwa (minuty) |
| 8.12.6. | Udział jazdy w terenie miejskim w oparciu o odległość (%) |
| 8.12.7. | Udział jazdy w terenie wiejskim w oparciu o odległość (%) |
| 8.12.8. | Udział jazdy po autostradzie w oparciu o odległość (%) |
| 8.12.9. | Czasowy udział postoju na biegu jałowym (%) |
| 8.12.10. | Średnia temperatura otoczenia (°C) |
| 8.12.11. | Stan drogi (sucha, mokra, śnieg, lód, inny - proszę określić) |
| 8.12.12. | Maksymalna wysokość trasy nad poziomem morza (m) |
| 8.12.13. | Maksymalny czas nieprzerwanego postoju na biegu jałowym (minuty) |
| 8.13. | Wyniki badania weryfikacyjnego |
| 8.13.1. | Średnia moc wentylatora obliczona na użytek badania weryfikacyjnego przez narzędzie symulacyjne (kW) |
| 8.13.2. | Dodatnia praca na kołach obliczona podczas badania weryfikacyjnego przez narzędzie symulacyjne (kWh) |
| 8.13.3. | Zmierzona dodatnia praca na kołach wykonana podczas badania weryfikacyjnego (kWh) |
| 8.13.4. | Wartość opałowa paliw wykorzystanych w badaniu weryfikacyjnym (MJ/kg) |
| 8.13.5. | Zmierzone wartości zużycia paliwa podczas badania weryfikacyjnego (g/kWh) |
| 8.13.5.1 | Zmierzone wartości emisji CO2 podczas badania weryfikacyjnego (g/kWh) |
| 8.13.6. | Zmierzone wartości zużycia paliwa podczas badania weryfikacyjnego, skorygowane (g/kWh) |
| 8.13.6.1 | Zmierzone wartości emisji CO2 podczas badania weryfikacyjnego, skorygowane (g/kWh) |
| 8.13.7. | Symulowane wartości zużycia paliwa podczas badania weryfikacyjnego (g/kWh) |
| 8.13.7.1 | Symulowane wartości emisji CO2 podczas badania weryfikacyjnego (g/kWh) |
| 8.13.8. | Symulowane zużycie paliwa podczas badania weryfikacyjnego (g/kWh) |
| 8.13.8.1 | Symulowane emisje CO2 podczas badania weryfikacyjnego (g/kWh) |
| 8.13.9. | Przeznaczenie (transport długodystansowy/transport długodystansowy (EMS)/regionalny/regionalny (EMS)/miejski/gminny/budownictwo) |
| 8.13.10. | Zweryfikowane emisje CO2 pojazdu (g/tkm) |
| 8.13.11. | Zadeklarowane emisje CO2 pojazdu (g/tkm) |
| 8.13.12. | Stosunek zużycia paliwa zmierzonego i symulowanego w ramach procedury badania weryfikacyjnego (CVPT) w (-) |
| 8.13.13. | Czy wynik badania weryfikacyjnego jest pozytywny? (tak/nie) |
| 8.13.14. | Emisje zanieczyszczeń podczas badania weryfikacyjnego |
| 8.13.14.1. | CO (g/kWh) |
| 8.13.14.2. | THC (**) (mg/kWh) |
| 8.13.14.3. | NMHC (***) (mg/kWh) |
| 8.13.14.4. | CH4 (***) (mg/kWh) |
| 8.13.14.5. | NOx (mg/kWh) |
| 8.13.14.6. | Liczba cząstek stałych (#/kWh) |
| 8.13.14.7. | Dodatnia praca silnika (kWh) |
| 8.14. | Oprogramowanie i informacje dla użytkowników |
| 8.14.1. | Wersja narzędzia symulacyjnego (X.X.X) |
| 8.14.2. | Data i godzina symulacji |
| 8.15. | Dane wejściowe do narzędzia symulacyjnego określone w pkt 7.1 |
| 8.16. | Dane wyjściowe symulacji |
| 8.16.1. | Zagregowane wyniki symulacji Plik z rozszerzeniem ».vsum« z wartościami oddzielonymi przecinkami, o tej samej nazwie co plik roboczy, zawierający zagregowane wyniki symulowanego badania weryfikacyjnego, generowany przez narzędzie symulacyjne w wersji z graficznym interfejsem użytkownika (»plik z danymi sum exec«). |
| 8.16.2. | Wyniki symulacji rozdzielone w czasie Plik z rozszerzeniem ».vmod« z wartościami oddzielonymi przecinkami z nazwą zawierającą VIN i nazwę pliku z danymi pomiarowymi, zawierający rozdzielone w czasie wyniki symulowanego badania weryfikacyjnego, generowany przez narzędzie symulacyjne w wersji z graficznym interfejsem użytkownika (»plik z danymi mod«). |
Dodatek 1
Główne etapy oceny i równania wykonywane przez narzędzie symulacyjne podczas symulacji procedury badania weryfikacyjnego
W niniejszym dodatku przedstawiono główne etapy oceny i podstawowe równania stosowane przez narzędzie symulacyjne podczas symulacji procedury badania weryfikacyjnego
CZĘŚĆ A: Określenie współczynnika CVTP
W celu określenia współczynnika CVTP, o którym mowa w pkt 7.2.2, stosuje się procedury obliczania określone poniżej:
| 1. | Obliczanie mocy na kołach Dane dotyczące momentu obrotowego odczytane z przetworzonych danych pomiarowych zgodnie z tabelą 4 koryguje się z uwzględnieniem odchylenia urządzenia do pomiaru momentu obrotowego w następujący sposób:  gdzie:
Moc na kołach oblicza się na podstawie skorygowanego momentu obrotowego i prędkości obrotowej kół w następujący sposób:  gdzie:
Całkowitą moc na kołach oblicza się jako sumę mocy na kołach wygenerowanej na lewym i prawym kole:  |
| 2. | Określenie zmierzonego zużycia paliwa w stanie zatrzymania (FCm-c) »Zużycie paliwa w stanie zatrzymania zmierzone i skorygowane w fazie dotarcia« (BSFCm-c), stosowane w pkt 7.2.2, oblicza się za pomocą narzędzia symulacyjnego, jak opisano poniżej. Najpierw oblicza się surową wartość zmierzonego zużycia paliwa w stanie zatrzymania na potrzeby badania weryfikacyjnego BSFCm w następujący sposób:  gdzie:
 Następnie przeprowadza się korektę BSFCm z uwzględnieniem wartości opałowej paliwa wykorzystanego w badaniu weryfikacyjnym, uzyskując BSFCm,corr:  gdzie:
Korektę tę stosuje się w odniesieniu do wszystkich rodzajów paliwa, tj. także w przypadku silników Diesla (zob. przypis 2 w tabeli 4a). W ramach trzeciego kroku stosuje się korektę uwzględniającą fazę dotarcia:  gdzie:
W przypadku pojazdów dwupaliwowych wszystkie trzy kroki oceny przeprowadza się osobno w odniesieniu do obydwu rodzajów paliwa. |
| 3. | Określenie zużycia paliwa w stanie zatrzymania symulowanego w narzędziu symulacyjnym (BSFCsim) W trybie badania weryfikacyjnego narzędzia symulacyjnego zmierzoną moc na kołach stosuje się jako dane wejściowe do algorytmu symulacji wstecznej (ang. backward simulation). Biegi włączone w trakcie badania weryfikacyjnego określa się, obliczając prędkości obrotowe silnika według poszczególnych biegów przy zmierzonej prędkości pojazdu i wybierając bieg, który zapewnia prędkość obrotową silnika jak najbliższą zmierzonej prędkość obrotowej silnika. W przypadku przekładni APT w fazach z aktywnym przemiennikiem momentu obrotowego wykorzystywany jest rzeczywisty sygnał biegu z pomiaru. Modele strat dla przełożenia osi, napędu kątowego, zwalniaczy, przekładni i przystawek odbioru mocy są stosowane w podobny sposób jak w trybie deklaracyjnym narzędzia symulacyjnego. Jeżeli chodzi o zapotrzebowanie na moc urządzeń pomocniczych w zakresie pompy układu kierowniczego, układu pneumatycznego, układu elektrycznego oraz układu HVAC, przyjmuje się wartości ogólne stosowane w danej technologii w narzędziu symulacyjnym. W celu obliczenia zapotrzebowania na moc wentylatora chłodzącego silnik stosuje się następujące wzory: Przypadek a) wentylatory chłodzące silnik napędzane inaczej niż elektrycznie:  gdzie:
przypadek b) wentylatory chłodzące silnik napędzane elektrycznie: Pfan(t) = P el(t) . 1,05
W odniesieniu do silników, w przypadku których podczas badania weryfikacyjnego doszło do zdarzeń związanych z systemem wyłączania-włączania silnika, stosuje się podobne korekty zapotrzebowania na moc urządzeń pomocniczych oraz energii potrzebnej do ponownego uruchomienia silnika jak korekty stosowane w trybie deklaracyjnym narzędzia symulacyjnego. Symulację chwilowego zużycia paliwa przez silnik FCsim(t) przeprowadza się dla każdego 0,5-sekundowego przedziału czasu w następujący sposób:
Zużycie paliwa w stanie zatrzymania obliczane za pomocą narzędzia symulacyjnego BSFCm-c, stosowane w pkt 7.2.2 do obliczania współczynnika CVTP oblicza się w następujący sposób:  gdzie:

W przypadku silników dwupaliwowych BSFCsim określa się osobno w odniesieniu do obydwu rodzajów paliwa. |
CZĘŚĆ B Określanie emisji zanieczyszczeń w stanie zatrzymania
Moc silnika oblicza się na podstawie zmierzonych sygnałów prędkości obrotowej silnika i momentu obrotowego silnika w następujący sposób:

gdzie:
| Peng,m | = | zmierzona moc silnika w badaniu weryfikacyjnym [kW] |
| t | = | węzeł czasu [s] |
| neng | = | zmierzona prędkość obrotowa silnika [obr./min] |
| Teng | = | zmierzony moment obrotowy silnika [Nm] |
Dodatnią pracę silnika zmierzoną w badaniu weryfikacyjnym oblicza się w następujący sposób:
| Weng,pos,m | = | dodatnia praca silnika zmierzona w badaniu weryfikacyjnym [kWh] |
| fs | = | częstotliwość próbkowania = 2 [Hz] |
| tstart | = | pierwszy znacznik czasu w przetworzonych danych pomiarowych zgodnie z tabelą 4 [s] |
| tend | = | ostatni znacznik czasu w przetworzonych danych pomiarowych zgodnie z tabelą 4 [s] |
Emisje zanieczyszczeń w stanie zatrzymania zmierzone w badaniu weryfikacyjnym (BSEM) oblicza się w następujący sposób:
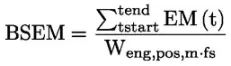
gdzie:
| BSEM | = | emisji zanieczyszczeń w stanie zatrzymania zmierzone w badaniu weryfikacyjnym [g/kWh] |
| EM | = | chwilowy przepływ masowy emisji zanieczyszczeń zmierzony podczas badania weryfikacyjnego [g/s] |
| (*) | Dyrektywa Rady 96/53/WE z dnia 25 lipca 1996 r. ustanawiająca dla niektórych pojazdów drogowych poruszających się na terytorium Wspólnoty maksymalne dopuszczalne wymiary w ruchu krajowym i międzynarodowym oraz maksymalne dopuszczalne obciążenia w ruchu międzynarodowym (Dz.U. L 235 z 17.9.1996, s. 59). |
| (**) | Wyłącznie gdy pomiar tej części należy przeprowadzić zgodnie z pkt 1 dodatku 1 do załącznika II do rozporządzenia (UE) nr 582/2011. |
| (***) | Dla silników o zapłonie iskrowym.. |
(*1) Uwzględnia się całkowitą liczbę wszystkich pojazdów producenta objętych zakresem stosowania niniejszego rozporządzenia, a procedurą badania weryfikacyjnego należy objąć zarówno średnie samochody ciężarowe, jak i ciężkie samochody ciężarowe przez okres sześciu lat.
(*2) Procedurę badania weryfikacyjnego przeprowadza się w okresie pierwszych dwóch lat.
(1) Czas narastania oznacza okres między 10 % a 90 % reakcji końcowego odczytu analizatora (t90 - t10).
(2) Dokładności dochowuje się dla całkowitego przepływu paliwa przez 100 minut.
(3) Nieliniowość oznacza maksymalne odchylenie między idealnymi a faktycznymi właściwościami sygnału wyjściowego w stosunku do zmierzonej wartości w ramach określonego zakresu pomiaru.
(4) Powtarzalność oznacza stopień zgodności wyników kolejnych pomiarów tej samej zmierzonej wartości przeprowadzonych w tych samych warunkach pomiaru.
(5) W przypadku gdy maksymalna prędkość pojazdu jest mniejsza niż 80 km/h, średnia prędkość podczas rozgrzewania musi przekraczać maksymalną prędkość pojazdu minus 10 km/h.
(6) Korekta przepływu paliwa do standardowej wartości opałowej jest wykonywana automatycznie przez narzędzie symulacyjne na podstawie danych wejściowych dotyczących wartości opałowej paliwa wykorzystanego w badaniu weryfikacyjnym zgodnie z tabelą 4a.
(7) Podczas procedury badania weryfikacyjnego pojazd może być zasilany rynkowym olejem napędowym. W przeciwieństwie do sytuacji w przypadku wzorcowego oleju napędowego (B7), ocenia się, że odchylenia wartości opałowej dla paliwa rynkowego są większe niż dokładność pomiaru przy określaniu wartości opałowej.
ZAŁĄCZNIK XII
"ZAŁĄCZNIK Xb
CERTYFIKACJA CZĘŚCI ELEKTRYCZNEGO MECHANIZMU NAPĘDOWEGO
1. Wprowadzenie
Procedury badania części opisane w niniejszym załączniku prowadzą do wygenerowania danych wejściowych dotyczących układów maszyny elektrycznej, zintegrowanego elektrycznego układu przeniesienia napędu (IEPC), zintegrowanego układu przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1, układów akumulatorów oraz układów kondensatorów na potrzeby narzędzia symulacyjnego.
2. Definicje i skróty
Na potrzeby niniejszego załącznika stosuje się następujące definicje:
| (1) | »układ kontroli akumulatorów« lub »BCU« oznacza urządzenie elektroniczne, które kontroluje elektryczne i termiczne funkcje układu akumulatorów, zarządza nimi, wykrywa je oraz oblicza, oraz które zapewnia komunikację między układem akumulatorów, zestawem akumulatorów lub częścią zestawu akumulatorów a innymi urządzeniami sterującymi; |
| (2) | »zestaw akumulatorów« oznacza REESS (układ magazynowania energii elektrycznej wielokrotnego ładowania), który zawiera ogniwa wtórne lub zespoły ogniw wtórnych, które są zwykle połączone z elektroniką ogniw, obwodami zasilania i nadprądowym urządzeniem odcinającym, w tym połączenia elektryczne i interfejsy dla systemów zewnętrznych (przykładami systemów zewnętrznych są systemy przeznaczone do kondycjonowania termicznego, urządzenia pomocnicze wysokiego i niskiego napięcia oraz systemy łączności); |
| (3) | »układ akumulatorów« oznacza REESS składający się z zespołów ogniw wtórnych lub zestawów akumulatorów, jak również obwodów elektrycznych, elektroniki, interfejsów dla systemów zewnętrznych (np. układu kondycjonowania termicznego), układu kontroli akumulatorów i styczników; |
| (4) | »reprezentatywny podukład akumulatorów« oznacza podukład układu akumulatorów, który składa się z zespołów ogniw wtórnych albo zestawów akumulatorów w konfiguracji szeregowej lub równoległej z obwodami elektrycznymi, interfejsami układu kondycjonowania termicznego, jednostkami sterującymi i elektroniką ogniw; |
| (5) | »ogniwo« oznacza podstawową funkcjonalną jednostkę akumulatora składającą się z zespołu elektrod, elektrolitów, pojemnika, zacisków i zwykle separatorów, która to jednostka jest źródłem energii elektrycznej wytwarzanej w wyniku bezpośredniej przemiany energii chemicznej; |
| (6) | »elektronika ogniw« oznacza urządzenie elektryczne, które gromadzi i ewentualnie monitoruje dane dotyczące temperatury lub dane elektryczne na temat ogniw lub zespołów ogniw, lub kondensatorów lub zespołów kondensatorów oraz zawiera elektronikę służącą, w stosownych przypadkach, do wyrównywania stanu naładowania poszczególnych ogniw lub kondensatorów. |
| (7) | »ogniwo wtórne« oznacza ogniwo zaprojektowane tak, że można je ładować w drodze odwracalnej reakcji chemicznej; |
| (8) | »kondensator« oznacza urządzenie służące do przechowywania energii elektrycznej wytworzonej na skutek dwuwarstwowej kapacytancji elektrostatycznej oraz pseudo kapacytancji elektrochemicznej w ogniwie elektrochemicznym; |
| (9) | »ogniwo kondensatora« oznacza podstawową jednostkę funkcjonalną kondensatora, składającą się ze zbioru elektrod, elektrolitów, pojemnika, zacisków i zwykle separatorów; |
| (10) | »układ kontroli kondensatorów« lub »CCU« oznacza urządzenie elektroniczne, które kontroluje elektryczne i termiczne funkcje układu kondensatorów, zarządza nimi, wykrywa je oraz oblicza, oraz które zapewnia komunikację między układem kondensatorów, zestawem kondensatorów lub częścią zestawu kondensatorów a innymi urządzeniami sterującymi pojazdu; |
| (11) | »zestaw kondensatorów« oznacza REESS, który zawiera ogniwa kondensatora lub zespoły kondensatorów połączone zwykle z elektroniką ogniw kondensatora, obwodami zasilania i nadprądowym urządzeniem odcinającym, w tym połączenia elektryczne, interfejsy dla systemów zewnętrznych i CCU. Przykładami systemów zewnętrznych są systemy przeznaczone do kondycjonowania termicznego, urządzenia pomocnicze wysokiego i niskiego napięcia oraz systemy łączności. |
| (12) | »układ kondensatorów« oznacza REESS składający się z ogniw, zespołów lub zestawów kondensatorów, jak również obwodów elektrycznych, elektroniki, interfejsów dla systemów zewnętrznych (np. układu kondycjonowania termicznego), CCU i styczników; |
| (13) | »reprezentatywny podukład kondensatorów« oznacza podukład układu kondensatorów, który składa się z zespołów kondensatorów albo zestawów kondensatorów w konfiguracji szeregowej lub równoległej z obwodami elektrycznymi, interfejsami układu kondycjonowania termicznego, jednostkami sterującymi i elektroniką ogniw kondensatorów; |
| (14) | »nC« oznacza natężenie prądu równe n-krotności jednogodzinnej rozładowanej pojemności wyrażonej w amperach (tj. prąd, za pomocą którego w ciągu 1/n godzin badane urządzenie zostaje w pełni naładowane lub w pełni rozładowane na podstawie pojemności znamionowej); |
| (15) | »przekładnia bezstopniowa« lub »przekładnia CVT« oznacza przekładnię automatyczną, w której zmiany przełożenia mogą następować płynnie w ciągłym zakresie przełożeń; |
| (16) | »mechanizm różnicowy« oznacza urządzenie, które rozdziela moment obrotowy na dwa odgałęzienia, np. dla kół po lewej i prawej stronie, umożliwiając jednocześnie obracanie się tych odgałęzień z nierównymi prędkościami. Funkcja rozdzielenia momentu obrotowego może być dostosowywana lub dezaktywowana przy użyciu hamulca mechanizmu różnicowego lub zamka różnicowego (w stosownych przypadkach); |
| (17) | »przełożenie mechanizmu różnicowego« oznacza stosunek wejściowej prędkości obrotowej mechanizmu różnicowego (w kierunku głównego przetwornika energii napędowej) do wyjściowej prędkości obrotowej mechanizmu różnicowego (w kierunku kół napędzanych), przy obydwu wałach zdawczych mechanizmu różnicowego pracujących z tą samą prędkością; |
| (18) | »układ napędowy« oznacza połączone elementy mechanizmu napędowego służące do przenoszenia energii mechanicznej pomiędzy przetwornikiem (przetwornikami) energii napędowej a kołami; |
| (19) | »maszyna elektryczna« oznacza przetwornik energii przekształcający energię elektryczną na mechaniczną i odwrotnie; |
| (20) | »układ maszyny elektrycznej« oznacza kombinację elektrycznego mechanizmu napędowego zainstalowanego w pojeździe składającą się z maszyny elektrycznej, falownika i elektronicznych modułów sterujących, w tym połączeń i interfejsów dla systemów zewnętrznych; |
| (21) | »typ maszyny elektrycznej« oznacza a) maszynę asynchroniczną (ASM), b) maszynę synchroniczną wzbudzaną (ESM), c) maszynę synchroniczną z magnesem trwałym (PSM) albo d) maszynę reluktancyjną (RM). |
| (22) | »ASM« oznacza maszynę elektryczną asynchroniczną, w przypadku której natężenie prądu w wirniku niezbędnym do wytworzenia momentu obrotowego uzyskuje się w wyniku indukcji elektromagnetycznej z pola magnetycznego w uzwojeniu stojana; |
| (23) | »ESM« oznacza maszynę elektryczną synchroniczną wzbudzaną, która składa się z wielofazowych elektromagnesów zasilanych prądem przemiennym na stojanie wytwarzającym pole magnetyczne wirujące w czasie przy oscylacjach prądu liniowego; W celu wzbudzenia wymagane jest dostarczenie prądu stałego do wirnika. |
| (24) | »PSM« oznacza rodzaj maszyny elektrycznej synchronicznej z magnesami trwałymi, która zawiera wielofazowe elektromagnesy prądu przemiennego na stojanie wytwarzające pole magnetyczne wirujące w czasie przy oscylacjach prądu liniowego. Magnesy stałe osadzone w stalowym wirniku wytwarzają stałe pole magnetyczne. |
| (25) | »maszyna reluktancyjna« oznacza rodzaj maszyny elektrycznej reluktancyjnej, która zawiera wielofazowe elektromagnesy prądu przemiennego na stojanie wytwarzające pole magnetyczne wirujące w czasie przy oscylacjach prądu liniowego. Maszyna ta indukuje niestałe bieguny magnetyczne na ferromagnetycznym wirniku, który nie ma żadnego uzwojenia. Służy do generowania momentu obrotowego za pomocą oporu magnetycznego; |
| (26) | »obudowa« oznacza zintegrowaną i strukturalną część osłaniającą podzespoły wewnętrzne, zapewniającą ochronę przed kontaktem bezpośrednim z dowolnej strony; |
| (27) | »przetwornik energii« oznacza układ, w którym forma energii oddawanej różni się od formy energii pobieranej. |
| (28) | »przetwornik energii napędowej« oznacza przetwornik energii mechanizmu napędowego, który nie jest urządzeniem peryferyjnym, którego energia oddawana jest wykorzystywana bezpośrednio lub pośrednio na potrzeby napędzania pojazdu. |
| (29) | »kategoria przetwornika energii napędowej« oznacza (i) silnik spalinowy wewnętrznego spalania, (ii) maszynę elektryczną lub (iii) ogniwo paliwowe. |
| (30) | »układ magazynowania energii« oznacza układ, który magazynuje i uwalnia energię w tej samej formie, w jakiej została pobrana; |
| (31) | »układ magazynowania energii napędowej« oznacza układ magazynowania energii mechanizmu napędowego, który nie jest urządzeniem peryferyjnym, którego energia oddawana jest wykorzystywana bezpośrednio lub pośrednio na potrzeby napędzania pojazdu; |
| (32) | »kategoria układu magazynowania energii napędowej« oznacza (i) układ przechowywania paliwa, (ii) układ magazynowania energii elektrycznej wielokrotnego ładowania lub (iii) układ magazynowania energii mechanicznej wielokrotnego ładowania; |
| (33) | »forma energii« oznacza (i) energię elektryczną, (ii) energię mechaniczną lub (iii) energię chemiczną (w tym paliwa); |
| (34) | »układ przechowywania paliwa« oznacza układ magazynowania energii napędowej, który magazynuje energię chemiczną w postaci paliwa ciekłego lub gazowego; |
| (35) | »skrzynia biegów« oznacza urządzenie służące do zmiany momentu obrotowego i prędkości przy określonych stałych przełożeniach każdego biegu, które może także posiadać funkcję przełączalnych biegów; |
| (36) | »numer biegu« oznacza identyfikator poszczególnych przełączalnych biegów do jazdy do przodu w przypadku przekładni o określonych przełożeniach; przełączalny bieg o najwyższym przełożeniu ma przypisany numer 1; numer identyfikujący zwiększa się przyrostowo o 1 z każdym biegiem w porządku malejącym przełożeń; |
| (37) | »przełożenie« oznacza przełożenie prędkości jazdy do przodu na wale wejściowym (w kierunku głównego przetwornika energii napędowej) na prędkość na wale zdawczym (w kierunku kół napędzanych) bez poślizgu; |
| (38) | »układ akumulatorów o dużej gęstości energii« lub »HEBS« oznacza układ akumulatorów lub reprezentatywny podukład akumulatorów, dla którego stosunek liczbowy między maksymalnym prądem rozładowania wyrażonym w amperach (A), zadeklarowanym przez producenta części przy poziomie naładowania 50 % zgodnie z pkt 5.4.2.3.2, a nominalną mocą wyjściową ładunku elektrycznego wyrażoną w amperogodzinach (Ah) przy współczynniku rozładowania 1C w temperaturze pokojowej jest mniejszy niż 10; |
| (39) | »układ akumulatorów o dużej gęstości mocy« lub »HPBS« oznacza układ akumulatorów lub reprezentatywny podukład akumulatorów, dla którego stosunek liczbowy między maksymalnym prądem rozładowania wyrażonym w amperach (A), zadeklarowanym przez producenta części przy poziomie naładowania 50 % zgodnie z pkt 5.4.2.3.2, a nominalną mocą wyjściową ładunku elektrycznego wyrażoną w amperogodzinach (Ah) przy współczynniku rozładowania 1C w temperaturze pokojowej jest równy lub większy niż 10; |
| (40) | »zintegrowany elektryczny mechanizm napędowy« lub »IEPC« oznacza połączony układ obejmujący układ maszyny elektrycznej i funkcję jednobiegowej lub wielobiegowej skrzyni biegów albo mechanizmu różnicowego, albo obydwie te funkcje, charakteryzujący się co najmniej jedną z następujących cech:
Ponadto IEPC musi spełniać następujące kryteria:
|
| (41) | »silnik napędzający bezpośrednio piastę koła typu IEPC« oznacza IEPC z jednym wałem zdawczym albo dwoma wałami zdawczymi podłączonymi bezpośrednio do piasty koła, przy czym do celów niniejszego załącznika należy rozróżnić dwie konfiguracje:
|
| (42) | »zintegrowany mechanizm napędowy w hybrydowych pojazdach elektrycznych typu 1« lub »IHPC typu 1« oznacza połączony układ obejmujący kilka układów maszyny elektrycznej oraz funkcji wielobiegowej skrzyni biegów, charakteryzujący się wspólną obudową wszystkich części i co najmniej jedną z następujących cech:
Ponadto zintegrowany układ przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 musi spełniać następujące kryteria:
|
| (43) | »silnik spalinowy wewnętrznego spalania« lub »ICE« oznacza przetwornik energii z przerywanym lub ciągłym utlenianiem paliwa, przekształcający energię chemiczną na mechaniczną; |
| (44) | »falownik« oznacza przetwornik energii elektrycznej zmieniający stały prąd elektryczny w jednofazowy lub wielofazowy prąd przemienny; |
| (45) | »urządzenia peryferyjne« oznaczają wszelkie urządzenia pobierające, przekształcające, magazynujące lub dostarczające energię, w przypadku których energia nie jest wykorzystywana bezpośrednio ani pośrednio do celów napędzania pojazdu, ale które mają zasadnicze znaczenie dla pracy mechanizmu napędowego i z tego względu są uznawane za część tego mechanizmu; |
| (46) | »mechanizm napędowy« oznacza łączną kombinację w pojeździe układu (układów) magazynowania energii napędowej, przetwornika (przetworników) energii napędowej oraz układu napędowego (układów napędowych), zapewniających energię mechaniczną na kołach w celu napędzania pojazdu, wraz z urządzeniami peryferyjnymi; |
| (47) | »pojemność znamionowa« oznacza łączną liczbę amperogodzin, które można pobrać z w pełni naładowanego akumulatora ustaloną zgodnie z procedurą przedstawioną w pkt 5.4.1.3; |
| (48) | »prędkość znamionowa« oznacza najwyższą prędkość obrotową układu maszyny elektrycznej, przy której występuje łączny maksymalny moment obrotowy; |
| (49) | »temperatura pokojowa« oznacza, że temperatura powietrza wewnątrz komory do badań ma wynosić (25 ± 10) °C; |
| (50) | »poziom naładowania« oznacza dostępny ładunek elektryczny przechowywany w układzie akumulatorów wyrażony jako odsetek jego pojemności znamionowej zgodnie z pkt 5.4.1.3 (gdzie 0 % oznacza pusty akumulator, a 100 % - w pełni naładowany akumulator); |
| (51) | »jednostka poddana badaniu« oznacza układ maszyny elektrycznej, zintegrowany elektryczny układ przeniesienia napędu lub zintegrowany układ przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1, który ma zostać faktycznie poddany badaniu; |
| (52) | »jednostka akumulatora poddana badaniu« oznacza układ akumulatorów lub reprezentatywny podukład akumulatorów, który ma zostać faktycznie poddany badaniu; |
| (53) | »jednostka kondensatora poddana badaniu« oznacza układ kondensatorów lub reprezentatywny podukład kondensatorów, który ma zostać faktycznie poddany badaniu. |
Na potrzeby niniejszego załącznika stosuje się następujące skróty:
| AC | prąd przemienny; |
| DC | prąd stały; |
| DCIR | opór wewnętrzny prądu stałego; |
| EMS | układ maszyny elektrycznej; |
| OCV | napięcie obwodu otwartego; |
| SC | cykl standardowy. |
3. Wymagania ogólne
Laboratoryjne urządzenia kalibracyjne muszą spełniać wymagania określone w normie IATF 16949, w serii norm ISO 9000 albo w normie ISO/IEC 17025. Wszystkie laboratoryjne, referencyjne urządzenia pomiarowe wykorzystywane do kalibracji lub weryfikacji muszą spełniać wymagania określone w normach krajowych lub międzynarodowych.
3.1 Specyfikacje urządzeń pomiarowych
Urządzenia pomiarowe muszą spełniać następujące wymagania w zakresie dokładności:
Tabela 1
Wymagania dotyczące układów pomiarowych
| Układ pomiarowy | Dokładność (1) |
| Prędkość obrotowa | 0,5 % odczytu analizatora lub 0,1 % maks. kalibracji (2) prędkości obrotowej, w zależności od tego, która z tych wartości jest większa |
| Moment obrotowy | 0,6 % odczytu analizatora lub 0,3 % maks. kalibracji (2) lub 0,5 Nm momentu obrotowego, w zależności od tego, która z tych wartości jest większa |
| Prąd | 0,5 % odczytu analizatora lub 0,25 % maks. kalibracji (2) lub 0,5 A natężenia, w zależności od tego, która z tych wartości jest większa |
| Napięcie | 0,5 % odczytu analizatora lub 0,25 % maks. kalibracji (2) lub napięcia, w zależności od tego, która z tych wartości jest większa |
| Temperatura | 1,5 K |
Dopuszcza się możliwość kalibracji wielopunktowej, co oznacza, że dany układ pomiarowy można skalibrować do wartości znamionowej, która będzie niższa niż zdolność układu pomiarowego.
3.2 Rejestracja danych
Wszystkie dane pomiarowe z wyjątkiem temperatury należy mierzyć i rejestrować z częstotliwością nie mniejszą niż 100 Hz. W przypadku pomiaru temperatury za wystarczającą uznaje się częstotliwość wynoszącą nie mniej niż 10 Hz.
Za zgodą organu udzielającego homologacji można zastosować filtrowanie sygnałów. Należy unikać jakiegokolwiek zniekształcania danych.
4. Badanie układów maszyny elektrycznej, zintegrowanych elektrycznych układów przeniesienia napędu i zintegrowanych układów przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1
4.1 Warunki badania
Jednostkę poddaną badaniu należy zainstalować, a wielkości mierzone, tj. natężenie, napięcie, moc falownika elektrycznego, prędkość obrotową i moment obrotowy, należy ustalić zgodnie z rys. 1 i pkt 4.1.1.
Rysunek 1
Przepisy dotyczące pomiaru układu maszyny elektrycznej lub IEPC
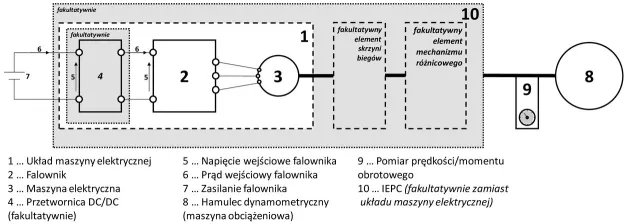
4.1.1 Równania na potrzeby obliczania wartości mocy
Wartości mocy oblicza się zgodnie z następującymi równaniami:
4.1.1.1 Moc falownika
Moc elektryczną dostarczaną do falownika lub wyprowadzaną z falownika (lub, w stosownych przypadkach, przetwornicy DC/DC) oblicza się na podstawie poniższego równania:
PINV_in = VINV_in × IINV_in
gdzie:
| PINV_in | oznacza moc falownika elektrycznego dostarczaną do falownika lub wyprowadzaną z falownika (lub, w stosownych przypadkach, przetwornicy DC/DC) po stronie DC falownika (lub po stronie DC źródła mocy przetwornicy DC/DC) [W] |
| VINV_in | oznacza napięcie dostarczane do falownika (lub, w stosownych przypadkach, przetwornicy DC/DC) po stronie DC falownika (lub po stronie DC źródła mocy przetwornicy DC/DC) [V] |
| IINV_in | oznacza natężenie dostarczane do falownika (lub, w stosownych przypadkach, przetwornicy DC/DC) po stronie DC falownika (lub po stronie DC źródła mocy przetwornicy DC/DC) [A] |
W przypadku wielu połączeń falownika (falowników) (lub, w stosownych przypadkach, przetwornicy (przetwornic) DC/DC) do źródła mocy elektrycznej DC zgodnych z pkt 4.1.3 należy zmierzyć łączną sumę wszystkich mocy falowników elektrycznych.
4.1.1.2 Mechaniczna moc wyjściowa
Mechaniczną moc wyjściową jednostki poddanej badaniu oblicza się zgodnie z następującym równaniem:

gdzie
| PUUT_out | oznacza mechaniczna moc wyjściową jednostki poddanej badaniu [W] |
| TUUT | oznacza moment obrotowy jednostki poddanej badaniu [Nm] |
| n | oznacza prędkość obrotową jednostki poddanej badaniu [min-1] |
W przypadku układu maszyny elektrycznej moment obrotowy i prędkość należy mierzyć na wale obrotowym. W przypadku zintegrowanego elektrycznego układu przeniesienia napędu moment obrotowy i prędkość mierzy się po stronie wyjściowej skrzyni biegów lub - w przypadku gdy stosuje się również mechanizm różnicowy - po stronie wyjściowej (stronach wyjściowych) tego mechanizmu.
W przypadku zintegrowanego elektrycznego układu przeniesienia napędu ze zintegrowanym mechanizmem różnicowym urządzenie (urządzenia) do pomiaru wyjściowego momentu obrotowego można zainstalować po obydwu stronach wyjściowych albo tylko po jednej stronie wyjściowej. W przypadku konfiguracji badania obejmujących tylko jeden hamulec dynamometryczny umieszczony po wyjściowej stronie swobodnie obracający się koniec zintegrowanego elektrycznego układu przeniesienia napędu ze zintegrowanym mechanizmem różnicowym musi być obrotowo zablokowany względem drugiego końca po stronie wyjściowej (np. za pomocą włączonego zamka różnicowego lub za pomocą innego mechanicznego zamka różnicowego stosowanego wyłącznie do celów pomiarowych).
W przypadku silnika napędzającego bezpośrednio piastę koła typu IEPC można dokonać pomiaru pojedynczej części albo dwóch części. Jeżeli dokonuje się pomiaru dwóch takich części, w zależności od konfiguracji zastosowanie mają następujące przepisy:
| - | w przypadku konfiguracji "L" moment obrotowy i prędkość mierzy się po stronie wyjściowej skrzyni biegów. W takiej sytuacji parametr wejściowy "NrOfDesignTypeWheelMotorMeasured" ustawia się na 1; |
| - | w przypadku konfiguracji "T" urządzenie (urządzenia) do pomiaru wyjściowego momentu obrotowego można zainstalować na obydwu wałach zdawczych albo na tylko jednym z nich;
|
4.1.2 Docieranie
Na prośbę wnioskodawcy można zastosować procedurę docierania jednostki poddanej badaniu. W przypadku procedury docierania stosuje się następujące przepisy:
| - | łączny czas wykonania w przypadku opcjonalnego docierania i pomiaru jednostki poddanej badaniu (poza kołami) nie może przekroczyć 120 godzin; |
| - | na potrzeby procedury docierania należy stosować wyłącznie olej fabryczny. Olej użyty na potrzeby docierania może zostać również wykorzystany w badaniu przeprowadzanym zgodnie z procedurą opisaną w pkt 4.2; |
| - | prędkość i profil momentu obrotowego dla procedury docierania określa producent części; |
| - | producent części musi udokumentować procedurę docierania w odniesieniu do czasu docierania, prędkości, momentu obrotowego i temperatury oleju i zgłosić organowi udzielającemu homologacji; |
| - | wymagania dotyczące temperatury oleju (pkt 4.1.8.1), dokładności pomiaru (pkt 3.1) i konfiguracji badania (pkt 4.1.3-4.1.7) nie mają zastosowania do procedury docierania. |
4.1.3 Zasilanie falownika
Układ zasilania falownika (lub, w stosownych przypadkach, przetwornicy DC/DC) musi być układem zasilania prądem stałym o stałym napięciu zapewniającym możliwość dostarczania odpowiedniej mocy elektrycznej do falownika lub przyjmowania takiej mocy przez falownik (lub, w stosownych przypadkach, przetwornicę DC/DC) przy maksymalnej mocy (mechanicznej lub elektrycznej) jednostki poddanej badaniu przez cały czas trwania przebiegów badawczych określonych w niniejszym załączniku.
Napięcie wejściowe prądu stałego dostarczanego do falownika (lub, w stosownych przypadkach, przetwornicy DC/DC) musi mieścić się w przedziale ± 2 % żądanej docelowej wartości napięcia wejściowego prądu stałego dostarczanego do jednostki poddanej badaniu we wszystkich okresach, w których rejestruje się faktyczne dane pomiarowe wykorzystywane jako podstawa do ustalenia danych wejściowych na potrzeby narzędzia symulacyjnego.
W tabeli 2 w pkt 4.2 wskazano poziomy napięcia, przy których należy przeprowadzać odpowiednie przebiegi badawcze. Na potrzeby pomiarów, które muszą zostać wykonane, ustalono 2 różne poziomy napięcia:
| - | Vmin,Test oznacza wartość docelową napięcia wejściowego prądu stałego dochodzącego do jednostki poddanej badaniu odpowiadającą minimalnemu napięciu zapewniającemu nieograniczoną funkcjonalność; |
| - | Vmax,Test oznacza wartość docelową napięcia wejściowego prądu stałego dochodzącego do jednostki poddanej badaniu odpowiadającą maksymalnemu napięciu zapewniającemu nieograniczoną funkcjonalność. |
4.1.4 Konfiguracja i przewody
Wszystkie przewody, osłony, wsporniki itp. muszą spełniać warunki określone przez producenta (producentów) poszczególnych części jednostki poddanej badaniu.
4.1.5 Układ chłodzenia
Temperatura wszystkich części układu maszyny elektrycznej musi mieścić się w granicach określonych przez producenta części przez cały czas trwania wszystkich przebiegów badawczych przeprowadzanych zgodnie z niniejszym załącznikiem. W przypadku zintegrowanego elektrycznego układu przeniesienia napędu i zintegrowanego układu przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 odnosi się to również do wszystkich innych części takich jak skrzynie biegów i osie stanowiących element zintegrowanego elektrycznego układu przeniesienia napędu lub zintegrowanego układu przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1.
4.1.5.1 Moc chłodzenia w trakcie przebiegów badawczych
4.1.5.1.1 Moc chłodzenia na potrzeby pomiaru ograniczeń momentu obrotowego
W przypadku wszystkich przebiegów badawczych przeprowadzanych zgodnie z pkt 4.2 - z wyjątkiem cyklu mapowania mocy elektrycznej przeprowadzanego zgodnie z pkt 4.2.6 - producent części musi wskazać liczbę wykorzystywanych obiegów chłodzenia podłączonych do zewnętrznego wymiennika ciepła. Dla każdego z takich obiegów podłączonych do zewnętrznego wymiennika ciepła należy zadeklarować następujące parametry na wlocie do odpowiedniego obiegu chłodzenia jednostki poddanej badaniu:
| - | maksymalne natężenie przepływu masowego chłodziwa lub maksymalne ciśnienie wejściowe określone przez producenta części; |
| - | maksymalne dopuszczalne temperatury chłodziwa określone przez producenta części; |
| - | maksymalna dostępna moc chłodzenia na stanowisku badawczym. |
Wspomniane wartości zadeklarowane należy zamieścić w dokumencie informacyjnym poświęconym odpowiedniej części.
Przedstawione poniżej wartości rzeczywiste nie mogą przekraczać zadeklarowanych wartości maksymalnych i muszą być rejestrowane dla każdego obiegu chłodzenia połączonego z zewnętrznym wymiennikiem ciepła wraz z danymi dotyczącymi badania dla wszystkich poszczególnych przebiegów badawczych przeprowadzonych zgodnie z pkt 4.2, z wyjątkiem cyklu odwzorowania mocy elektrycznej przeprowadzanego zgodnie z pkt 4.2.6:
| - | natężenie przepływu objętościowego lub masowego chłodziwa; |
| - | temperatura chłodziwa na wejściu do obiegu chłodzenia jednostki poddanej badaniu; |
| - | temperatura chłodziwa na wejściu i wyjściu wymiennika ciepła stanowiska badawczego po stronie jednostki poddanej badaniu. |
W przypadku wszystkich przebiegów badawczych przeprowadzanych zgodnie z pkt 4.2 minimalna temperatura chłodziwa na wlocie do obiegu chłodzenia jednostki poddanej badaniu chłodzonej cieczą musi wynosić 25 °C.
Jeżeli na potrzeby badania przeprowadzanego zgodnie z niniejszym załącznikiem wykorzystuje się ciecze inne niż standardowe ciecze chłodzące, temperatura tych cieczy nie może przekraczać granic wartości temperatury wyznaczonych przez producenta części.
W przypadku chłodzenia cieczą maksymalną dostępną moc chłodzenia na stanowisku badawczym ustala się na podstawie przepływu masowego chłodziwa, różnicy temperatur na wymienniku ciepła na stanowisku badawczym po stronie jednostki poddanej badaniu oraz ciepła właściwego chłodziwa.
W konfiguracji badania nie dopuszcza się możliwości wykorzystania dodatkowego wentylatora służącego do aktywnego chłodzenia części jednostki poddanej badaniu.
4.1.6 Falownik
Z falownika należy korzystać w tym samym trybie i przy tych samych ustawieniach co tryb i ustawienia określone przez producenta części dla rzeczywistych warunków użytkowania w pojeździe.
4.1.7 Warunki otoczenia w komorze do badań
Wszystkie badania należy przeprowadzać przy temperaturze otoczenia w komorze do badań wynoszącej 25 ± 10 °C. Temperaturę otoczenia należy mierzyć w odległości 1 m od jednostki poddanej badaniu.
4.1.8 Olej smarowy przeznaczony do stosowania w zintegrowanych elektrycznych układach przeniesienia napędu lub zintegrowanych układach przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1
Olej smarowy musi spełniać warunki określone w pkt 4.1.8.1-4.1.8.4 poniżej. Warunki te nie mają zastosowania do układów maszyn elektrycznych.
4.1.8.1 Temperatury oleju
Temperatury oleju należy mierzyć w środkowym punkcie miski olejowej lub w jakimkolwiek innym odpowiednim punkcie zgodnie z dobrą praktyką inżynierską.
W razie potrzeby dopuszcza się możliwość zastosowania pomocniczego układu regulującego zgodnie z pkt 4.1.8.4, aby utrzymać temperatury w granicach określonych przez producenta części.
W przypadku zewnętrznego kondycjonowania oleju, który dodaje się wyłącznie do celów związanych z badaniem, temperaturę można zmierzyć w przewodzie wylotowym prowadzącym z obudowy jednostki poddanej badaniu do układu kondycjonowania w odległości 5 cm za wylotem. W obydwu przypadkach temperatura oleju nie może przekraczać granic wartości temperatury określonych przez producenta części. Organowi udzielającemu homologacji typu należy przedstawić rzetelne uzasadnienie inżynieryjne na potwierdzenie, że do poprawy sprawności jednostki poddanej badaniu nie wykorzystuje się zewnętrznego układu kondycjonowania oleju. W przypadku obiegów oleju, które nie są jednym z elementów ani nie są podłączone do obiegu chłodzenia jakiejkolwiek części układu maszyny elektrycznej, temperatura nie może przekraczać 70 °C.
4.1.8.2 Jakość oleju
Do pomiaru wykorzystuje się tylko zalecany olej fabryczny określony przez producenta części wchodzącej w skład jednostki poddanej badaniu.
4.1.8.3 Lepkość oleju
Jeżeli w odniesieniu do oleju fabrycznego podane są różne oleje, producent części wybiera na potrzeby przeprowadzenia pomiarów jednostki poddanej badaniu powiązanej z certyfikacją olej, w przypadku którego współczynnik lepkości kinematycznej (KV) przy tej samej temperaturze mieści się w przedziale ± 10 % lepkości kinematycznej oleju o najwyższym poziomie lepkości (w przedziale tolerancji określonym dla lepkości kinematycznej wynoszącej 100).
4.1.8.4 Poziom i kondycjonowanie oleju
Poziom oleju lub jego objętość należy ustalić w przedziale mieszczącym się między poziomem maksymalnym a poziomem minimalnym określonym przez producenta części w specyfikacji obsługi technicznej.
Dopuszcza się zewnętrzny układ kondycjonowania i filtrowania. Obudowę jednostki poddanej badaniu można zmodyfikować, aby podłączyć od niej układ kondycjonowania oleju.
Zgodnie z dobrą praktyką inżynierską układu kondycjonowania oleju nie montuje się w sposób umożliwiający zmianę poziomu oleju jednostki poddanej badaniu w celu zwiększenia sprawności lub wytworzenia napędowych momentów obrotowych.
4.1.9 Konwencje dotyczące znaku
4.1.9.1 Moment obrotowy i moc
Zmierzone wartości momentu obrotowego i mocy mają znak dodatni dla jednostki poddanej badaniu napędzającej hamownię i znak ujemny dla jednostki poddanej badaniu wyhamowującej hamownię (tj. dla hamowni napędzającej jednostkę poddaną badaniu).
4.1.9.2 Prąd
Zmierzone wartości natężenia mają znak dodatni dla jednostki poddanej badaniu pobierającej moc elektryczną ze źródła zasilania falownika (lub, w stosownych przypadkach, do przetwornicy DC/DC) i znak ujemny dla jednostki poddanej badaniu dostarczającej moc elektryczną do falownika (lub, w stosownych przypadkach, przetwornicy DC/DC) i do zasilacza.
4.2 Przeprowadzane przebiegi badawcze
W tabeli 2 przedstawiono wszystkie przebiegi badawcze, które należy przeprowadzić w celu certyfikacji jednej konkretnej rodziny układów maszyny elektrycznej lub rodziny IEPC zdefiniowanej zgodnie z dodatkiem 13.
Cykl odwzorowania mocy elektrycznej przeprowadzany zgodnie z pkt 4.2.6 i badanie krzywej oporu przeprowadzane zgodnie z pkt 4.2.3 należy pominąć w przypadku wszystkich innych układów należących do rodziny z wyjątkiem układu macierzystego.
Jeżeli na wniosek producenta części zastosowano przepisy art. 15 ust. 5 niniejszego rozporządzenia, cykl odwzorowania mocy elektrycznej przeprowadzany zgodnie z pkt 4.2.6 i badanie krzywej oporu przeprowadzane zgodnie z pkt 4.2.3 należy przeprowadzić dodatkowo dla konkretnej maszyny elektrycznej lub dla konkretnego IEPC.
Tabela 2
Przegląd przeprowadzanych przebiegów badawczych układów maszyny elektrycznej lub IEPC
| Przebieg badawczy | Odniesienie do punktu | Wymagane poziomy napięcia, przy których należy przeprowadzić przebieg (zgodnie z pkt 4.1.3) | Obowiązkowy w przypadku układu macierzystego | Obowiązkowy w przypadku innych układów należących do rodziny |
| Maksymalne i minimalne ograniczenia momentu obrotowego | 4.2.2 | Vmin,Test i Vmax,Test | tak | tak |
| Krzywa oporu | 4.2.3 | Vmin,Test albo Vmax,Test | tak | nie |
| Maksymalny stały 30-minutowy moment obrotowy | 4.2.4 | Vmin,Test i Vmax,Test | tak | tak |
| Charakterystyka przeciążenia | 4.2.5 | Vmin,Test i Vmax,Test | tak | tak |
| Cykl odwzorowania mocy elektrycznej | 4.2.6 | Vmin,Test i Vmax,Test | tak | nie |
4.2.1 Przepisy ogólne
Pomiarów należy dokonywać przy zapewnieniu utrzymania temperatury wszystkich elementów jednostki poddanej badaniu pomiędzy wartościami granicznymi wyznaczonymi przez producenta części.
Wszystkie badania należy przeprowadzać przy obniżonych wartościach znamionowych, w zależności od wartości granicznych temperatur wyznaczonych dla w pełni aktywowanego układu maszyny elektrycznej. Jeżeli dodatkowe parametry innych układów zlokalizowanych poza granicami układu maszyny elektrycznej wywierają wpływ na zachowanie badanych układów w przypadku ich zastosowania w pojeździe przy obniżonych wartościach znamionowych, takich dodatkowych parametrów nie bierze się pod uwagę w ramach wszystkich przebiegów badawczych przeprowadzanych zgodnie z niniejszym załącznikiem.
O ile nie stwierdzono inaczej wszystkie wartości momentu obrotowego i prędkości podane dla układu maszyny elektrycznej odnoszą się do wału obrotowego maszyny elektrycznej.
O ile nie stwierdzono inaczej wszystkie wartości momentu obrotowego i prędkości podane dla zintegrowanego elektrycznego układu przeniesienia napędu odnoszą się do wartości mierzonych po stronie wyjściowej skrzyni biegów lub - w przypadku gdy stosuje się również mechanizm różnicowy - po stronie wyjściowej tego mechanizmu.
4.2.2 Badanie maksymalnych i minimalnych ograniczeń momentu obrotowego
Celem badania jest zmierzenie maksymalnych i minimalnych wartości ograniczenia momentu obrotowego jednostki poddanej badaniu, co służy potwierdzeniu zadeklarowanych wartości granicznych układu.
W przypadku zintegrowanego elektrycznego układu przeniesienia napędu z wielobiegową skrzynią biegów badanie przeprowadza się tylko dla biegu o przełożeniu najbliższym jedności. Jeżeli przełożenia dwóch biegów są jednakowo odległe od przełożenia wynoszącego jeden, badanie przeprowadza się tylko dla biegu o wyższym przełożeniu.
4.2.2.1 Wartości deklarowane przez producenta części
Producent części podaje wartości maksymalnego i minimalnego momentu obrotowego jednostki poddanej badaniu jako funkcję prędkości obrotowej jednostki poddanej badaniu mieszącą się w przedziale od 0 obr./min do maksymalnej prędkości eksploatacyjnej jednostki poddanej badaniu sprzed badania. Wartości te deklaruje się oddzielnie dla obu poziomów napięcia Vmin,Test i Vmax,Test.
4.2.2.2 Weryfikacja maksymalnych ograniczeń momentu obrotowego
Jednostkę poddaną badaniu poddaje się kondycjonowaniu (tzn. bez włączania układu) przy temperaturze otoczenia 25 ± 10 °C przez co najmniej dwie godziny przez rozpoczęciem przebiegu badawczego. Jeżeli badanie przeprowadza się bezpośrednio po innym przebiegu badawczym przeprowadzonym zgodnie z niniejszym załącznikiem, można pominąć lub skrócić okres co najmniej dwugodzinnego kondycjonowania pod warunkiem, że jednostka poddana badaniu pozostaje w komorze do badań, a temperaturę otoczenia w komorze badań utrzymuje się na poziomie 25 ± 10 °C.
Tuż przed rozpoczęciem badania jednostka poddana badaniu pracuje na stanowisku badawczym przez trzy minuty, wytwarzając moc równą 80 % mocy maksymalnej i z prędkością zalecaną przez producenta części.
Wyjściowy moment obrotowy i prędkość obrotową jednostki poddanej badaniu mierzy się przy co najmniej 10 różnych prędkościach obrotowych, aby prawidłowo wytyczyć krzywą maksymalnego momentu obrotowego między najniższą a najwyższą wartością prędkości.
Producent części musi wyznaczyć najniższą wartość docelową prędkości jako prędkość mniejszą niż lub równą 2 % maksymalnej prędkości eksploatacyjnej jednostki poddanej badaniu wskazanej przez producenta części zgodnie z pkt 4.2.2.1. Jeżeli konfiguracja badania uniemożliwia eksploatowanie układu przy tak niskiej wartości docelowej prędkości, producent części musi wyznaczyć najniższą wartość docelową prędkości jako najniższą prędkość, którą można uzyskać w ramach określonej konfiguracji badania.
Najwyższą wartość docelową prędkości należy wyznaczyć jako maksymalną prędkość eksploatacyjną jednostki poddanej badaniu wskazaną przez producenta części zgodnie z pkt 4.2.2.1.
Pozostałych co najmniej osiem różnych wartości docelowych prędkości obrotowej musi się mieścić między najniższą a najwyższą wartością docelową i określa je producent części. Przedział między dwiema sąsiadującymi wartościami docelowymi prędkości nie może być większy niż 15 % maksymalnej prędkości eksploatacyjnej jednostki poddanej badaniu, wskazanej przez producenta części.
Wszystkie punkty pracy utrzymuje się przez czas pracy wynoszący co najmniej trzy sekundy. Wyjściowy moment obrotowy i prędkość obrotową jednostki poddanej badaniu rejestruje się jako średnie wartości w ostatniej sekundzie pomiaru. Badanie nie trwa dłużej niż pięć minut.
4.2.2.3 Weryfikacja minimalnych ograniczeń momentu obrotowego
Jednostkę poddaną badaniu poddaje się kondycjonowaniu (tzn. bez włączania układu) przy temperaturze otoczenia 25-± 10 °C przez co najmniej dwie godziny przez rozpoczęciem przebiegu badawczego. Jeżeli badanie przeprowadza się bezpośrednio po innym przebiegu badawczym przeprowadzonym zgodnie z niniejszym załącznikiem, można pominąć lub skrócić okres co najmniej dwugodzinnego kondycjonowania pod warunkiem, że jednostka poddana badaniu pozostaje w komorze do badań, a temperaturę otoczenia w komorze badań utrzymuje się na poziomie 25 ± 10 °C.
Tuż przed rozpoczęciem badania jednostka poddana badaniu pracuje na stanowisku badawczym przez trzy minuty, wytwarzając moc równą 80 % mocy maksymalnej i z prędkością zalecaną przez producenta części.
Wyjściowy moment obrotowy i prędkość obrotową jednostki poddanej badaniu mierzy się przy prędkościach obrotowych wybranych w pkt 4.2.2.2.
Wszystkie punkty pracy utrzymuje się przez czas pracy wynoszący co najmniej trzy sekundy. Wyjściowy moment obrotowy i prędkość obrotową jednostki poddanej badaniu rejestruje się jako średnie wartości w ostatniej sekundzie pomiaru. Badanie nie trwa dłużej niż pięć minut.
4.2.2.4 Interpretacja wyników
Maksymalny moment obrotowy jednostki poddanej badaniu zadeklarowany producenta części zgodnie z pkt 4.2.2.1 przyjmuje się jako wartość ostateczną, jeżeli nie jest on większy o więcej niż +2 % w przypadku łącznego maksymalnego momentu obrotowego i +4 % w przypadku pozostałych punktów pomiarowych z tolerancją wynoszącą ± 2 % dla prędkości obrotowych od wartości zmierzonych zgodnie z pkt 4.2.2.2.
Jeżeli wartości maksymalnego momentu obrotowego podanego przez producenta części przekraczają ograniczenia określone powyżej, jako wartości ostateczne stosuje się rzeczywiste zmierzone wartości.
Gdy wartości maksymalnego momentu obrotowego jednostki poddanej badaniu podane przez producenta części zgodnie z pkt 4.2.2.1 są niższe niż wartości zmierzone zgodnie z pkt 4.2.2.2, jako wartości ostateczne stosuje się wartości podane przez producenta części.
Minimalny moment obrotowy jednostki poddanej badaniu zadeklarowany przez producenta części zgodnie z pkt 4.2.2.1 przyjmuje się jako wartość ostateczną, jeżeli nie jest on mniejszy o więcej niż -2 % w przypadku całkowitego minimalnego momentu obrotowego i mniejszy niż -4 % w przypadku pozostałych punktów pomiarowych z tolerancją wynoszącą ± 2 % dla prędkości obrotowych od wartości zmierzonych zgodnie z pkt 4.2.2.3.
Jeżeli wartości minimalnego momentu obrotowego podanego przez producenta części przekraczają ograniczenia określone powyżej, jako wartości ostateczne stosuje się rzeczywiste zmierzone wartości.
Gdy wartości minimalnego momentu obrotowego jednostki poddanej badaniu podane przez producenta części zgodnie z pkt 4.2.2.1 są wyższe niż wartości zmierzone zgodnie z pkt 4.2.2.3, jako wartości ostateczne stosuje się wartości podane przez producenta części.
4.2.3 Badanie krzywej oporu
W badanie mierzy się straty powodowane oporem w jednostce poddanej badaniu, tj. moc mechaniczną lub elektryczną niezbędną do wprowadzenia układu w ruch obrotowy o określonej prędkości przez zewnętrzne źródła energii.
Jednostkę poddaną badaniu poddaje się kondycjonowaniu (tzn. bez włączania układu) w temperaturze otoczenia wynoszącej 25 ± 10 °C przez co najmniej dwie godziny. Jeżeli badanie przeprowadza się bezpośrednio po innym przebiegu badawczym przeprowadzonym zgodnie z niniejszym załącznikiem, można pominąć lub skrócić okres co najmniej dwugodzinnego kondycjonowania pod warunkiem, że jednostka poddana badaniu pozostaje w komorze do badań, a temperaturę otoczenia w komorze badań utrzymuje się na poziomie 25 ± 10 °C.
Tuż przed rozpoczęciem właściwego badania jednostka poddana badaniu może opcjonalnie pracować na stanowisku badawczym przez trzy minuty, wytwarzając moc równą 80 % mocy maksymalnej i z prędkością zalecaną przez producenta części.
Właściwe badanie przeprowadza się według jednego z następujących wariantów:
| - | Wariant A: wał zdawczy jednostki poddanej badaniu połączony jest z maszyną obciążeniową (tj. hamulcem dynamometrycznym) i urządzenie to (tj. hamulec dynamometryczny) napędza jednostkę poddaną badaniu do zadanej prędkości obrotowej. Dostarczanie do falownika (lub w stosownych przypadkach przetwornicy DC/DC) mocy elektrycznej albo przewody fazy prądu przemiennego między maszyną elektryczną a falownikiem można ustawić jako nieaktywne albo rozłączyć. |
| - | Wariant B: wał zdawczy jednostki poddanej badaniu połączony jest z maszyną obciążeniową (tj. hamulcem dynamometrycznym) i jednostka poddana badaniu pracuje z zadaną prędkością obrotową napędzana przez moc elektryczną dostarczaną do falownika (lub, w stosownych przypadkach, przetwornicy DC/DC). |
| - | Wariant C: wał zdawczy jednostki poddanej badaniu połączony jest z maszyną obciążeniową (tj. hamulcem dynamometrycznym) i jednostka poddana badaniu pracuje z zadaną prędkością obrotową napędzana albo przez maszynę obciążeniową (tj. hamulec dynamometryczny) albo moc elektryczną dostarczaną do falownika (lub, w stosownych przypadkach, przetwornicy DC/DC) albo połączeniem obu. |
Badanie przeprowadza się przynajmniej przy prędkościach obrotowych wybranych w pkt 4.2.2.2.; możliwe jest dodanie większej liczby punktów pracy z innymi prędkościami obrotowymi. Wszystkie punkty pracy utrzymuje się przez czas pracy wynoszący co najmniej 10 sekund, podczas którego faktyczna prędkość obrotowa jednostki poddanej badaniu pozostaje w zakresie ± 2 % wartości docelowej prędkości obrotowej.
Następujące wartości rejestruje się jako wartość średnią w ciągu ostatnich pięciu sekund pomiaru w zależności od wybranego wariantu badania:
| - | dla wariantów B i C powyżej: moc elektryczną dostarczaną do falownika (lub, w stosownych przypadkach, do przetwornicy DC/DC), |
| - | dla wariantów A i C powyżej: moment obrotowy maszyny obciążeniowej (tj. hamulca dynamometrycznego) przyłożony do wału zdawczego lub wałów zdawczych jednostki poddanej badaniu, |
| - | dla wszystkich wariantów: prędkość obrotową jednostki poddanej badaniu. |
Jeżeli jednostka poddana badaniu jest zintegrowanym elektrycznym układem przeniesienia napędu z wielobiegową skrzynią biegów, badanie przeprowadza się dla biegu o przełożeniu najbliższym jedności. Jeżeli przełożenia dwóch biegów są jednakowo odległe od przełożenia wynoszącego jeden, badanie przeprowadza się tylko dla biegu o wyższym przełożeniu.
Badanie można dodatkowo przeprowadzić również dla wszystkich pozostałych biegów do jazdy do przodu zintegrowanego elektrycznego układu przeniesienia napędu w celu określenia oddzielnego zestawu danych dla każdego biegu do jazdy do przodu tego układu.
4.2.4 Badanie maksymalnego stałego 30-minutowego momentu obrotowego
W badaniu mierzy się średni maksymalny stały 30-minutowy moment obrotowy, jaki może osiągnąć jednostka poddana badaniu w czasie 1 800 sekund.
W przypadku zintegrowanego elektrycznego układu przeniesienia napędu z wielobiegową skrzynią biegów badanie przeprowadza się tylko dla biegu o przełożeniu najbliższym jedności. Jeżeli przełożenia dwóch biegów są jednakowo odległe od przełożenia wynoszącego jeden, badanie przeprowadza się tylko dla biegu o wyższym przełożeniu.
4.2.4.1 Wartości deklarowane przez producenta części
Producent części podaje wartości maksymalnego stałego 30-minutowego momentu obrotowego jednostki poddanej badaniu, a także odpowiadającą im prędkość obrotową przed badaniem. Prędkość obrotowa musi się mieścić w zakresie, w którym moc mechaniczna przekracza 90 % całkowitej maksymalnej mocy określonej na podstawie danych dotyczących maksymalnych ograniczeń momentu obrotowego zarejestrowanych zgodnie z pkt 4.2.2 dla odpowiedniego poziomu napięcia. Wartości te deklaruje się oddzielnie dla obu poziomów napięcia Vmin,Test i Vmax,Test.
4.2.4.2 Weryfikacja maksymalnego stałego 30-minutowego momentu obrotowego
Jednostkę poddaną badaniu poddaje się kondycjonowaniu (tzn. bez włączania układu) w temperaturze otoczenia wynoszącej 25 ± 10 °C przez co najmniej cztery godziny. Jeżeli badanie przeprowadza się bezpośrednio po innym przebiegu badawczym przeprowadzonym zgodnie z niniejszym załącznikiem, można pominąć lub skrócić okres co najmniej czterogodzinnego kondycjonowania pod warunkiem, że jednostka poddana badaniu pozostaje w komorze do badań, a temperaturę otoczenia w komorze badań utrzymuje się na poziomie 25 ± 10 °C.
Jednostka poddana badaniu pracuje przez całkowity okres wynoszący 1 800 sekund z wartością docelową momentu obrotowego i prędkością odpowiadają maksymalnemu stałemu 30-minutowemu momentowi obrotowemu, podanemu przez producenta części zgodnie z pkt 4.2.4.1.
Wyjściowy moment obrotowy i prędkość obrotową jednostki poddanej badaniu, a także moc elektryczną dostarczaną do falownika lub wyprowadzaną z falownika (lub w stosownych przypadkach dostarczaną do przetwornicy DC/DC lub z niej wyprowadzaną) mierzy się w tym okresie 1 800 sekund. Wartość mocy mechanicznej zmierzonej w czasie musi się mieścić w zakresie ± 5 % wartości mocy mechanicznej zadeklarowanej przez producenta części zgodnie z pkt 4.2.4.1.; prędkość obrotowa musi się mieścić w zakresie ± 2 % wartości zadeklarowanej przez producenta części zgodnie z pkt 4.2.4.1. Maksymalny stały 30-minutowy moment obrotowy jest średnim wyjściowym momentem obrotowym w okresie pomiaru wynoszącym 1 800 sekund. Odpowiadająca prędkość obrotowa jest średnią prędkością obrotową w okresie pomiaru wynoszącym 1 800 sekund.
4.2.4.3 Interpretacja wyników
Wartości podane przez producenta części zgodnie z pkt 4.2.4.1 przyjmuje się jako wartości ostateczne, jeżeli nie różnią się one o ponad +4 % w przypadku momentu obrotowego i o ± 2 % w przypadku prędkości obrotowej od średnich wartości ustalonych zgodnie z pkt 4.2.4.2.
Jeżeli wartości podane przez producenta części przekraczają ograniczenia określone powyżej, wymagania, o których mowa w pkt 4.2.4.1-4.2.4.3, powtarza się dla innych wartości maksymalnego stałego 30-minutowego momentu obrotowego lub odpowiadającej im prędkości obrotowej.
Jeżeli wartość momentu obrotowego podana przez producenta części zgodnie z pkt 4.2.4.1 jest niższa niż średnia wartość momentu obrotowego ustalona zgodnie z pkt 4.2.4.2 z tolerancją ± 2 % w przypadku prędkości obrotowej, jako wartości ostateczne stosuje się wartości podane przez producenta części.
Oblicza się ponadto wartość średnią rzeczywistej zmierzonej mocy elektrycznej dostarczanej do falownika lub wyprowadzaną z falownika (lub w stosownych przypadkach dostarczanej do przetwornicy DC/DC lub z niej wyprowadzanej) w okresie pomiaru wynoszącym 1 800 sekund. Oblicza się również średnią 30-minutową ciągłą moc na podstawie maksymalnego stałego 30-minutowego momentu obrotowego oraz odpowiadającej mu średniej prędkości obrotowej.
4.2.5 Badanie charakterystyki przeciążenia
W badaniu mierzy się czas trwania zdolności jednostki poddanej badaniu do zapewnienia maksymalnego wyjściowego momentu obrotowego w celu wyprowadzenia charakterystyki przeciążenia układu.
W przypadku zintegrowanego elektrycznego układu przeniesienia napędu z wielobiegową skrzynią biegów badanie przeprowadza się tylko dla biegu o przełożeniu najbliższym jedności. Jeżeli przełożenia dwóch biegów są jednakowo odległe od przełożenia wynoszącego jeden, badanie przeprowadza się tylko dla biegu o wyższym przełożeniu.
4.2.5.1 Wartości deklarowane przez producenta części
Producent części podaje wartość maksymalnego wyjściowego momentu obrotowego jednostki poddanej badaniu przy określonej prędkości obrotowej wybranej do badania, a także odpowiadającą prędkość obrotową przed badaniem. Odpowiadającą prędkość obrotową stanowi wartość docelowa prędkości stosowana do pomiaru przeprowadzonego zgodnie z pkt 4.2.4.2 dla odpowiedniego poziomu napięcia. Podana wartość maksymalnego wyjściowego momentu obrotowego jednostki poddanej badaniu musi być co najmniej równa wartości maksymalnego stałego 30-minutowego momentu obrotowego ustalonego zgodnie z pkt 4.2.4.3 dla odpowiedniego poziomu napięcia.
Producent części deklaruje ponadto czas trwania t0_maxP, w którym jednostka poddana badaniu może stale osiągać maksymalny wyjściowy moment obrotowy, przy rozpoczęciu badania w warunkach określonych w pkt 4.2.5.2. Wartości te deklaruje się oddzielnie dla obu poziomów napięcia Vmin,Test i Vmax,Test.
4.2.5.2 Weryfikacja maksymalnego wyjściowego momentu obrotowego
Jednostkę poddaną badaniu poddaje się kondycjonowaniu (tzn. bez włączania układu) w temperaturze otoczenia wynoszącej 25 ± 10 °C przez co najmniej dwie godziny. Jeżeli badanie przeprowadza się bezpośrednio po innym przebiegu badawczym przeprowadzonym zgodnie z niniejszym załącznikiem, można pominąć lub skrócić okres co najmniej dwugodzinnego kondycjonowania pod warunkiem, że jednostka poddana badaniu pozostaje w komorze do badań, a temperaturę otoczenia w komorze badań utrzymuje się na poziomie 25 ± 10 °C.
Tuż przed rozpoczęciem badania jednostka poddana badaniu pracuje na stanowisku badawczym przez 30 minut, dostarczając 50 % maksymalnego stałego 30-minutowego momentu obrotowego przy odpowiedniej wartości docelowej prędkości ustalonej zgodnie z pkt 4.2.4.3.
Następnie jednostka poddana badaniu pracuje z wartością docelową momentu obrotowego i prędkością odpowiadającą maksymalnemu wyjściowemu momentowi obrotowemu podanemu przez producenta części zgodnie z pkt 4.2.5.1.
Wyjściowy moment obrotowy i prędkość obrotową jednostki poddanej badaniu, a także napięcie prądu stałego dostarczanego do falownika (lub w stosownych przypadkach przetwornicy DC/DC) oraz mocy elektrycznej dostarczanej do falownika lub wyprowadzanej z falownika (lub w stosownych przypadkach dostarczanej do przetwornicy DC/DC lub z niej wyprowadzanej) mierzy się w czasie t0_maxP podanym przez producenta części zgodnie z pkt 4.2.5.1.
4.2.5.3 Interpretacja wyników
Zarejestrowane wartości momentu obrotowego i prędkości w czasie zmierzone zgodnie z pkt 4.2.5.2 akceptuje się, jeżeli nie różnią się one o ponad ± 2 % w przypadku momentu obrotowego i o ± 2 % w przypadku prędkości obrotowej od wartości podanych przez producenta części zgodnie z pkt 4.2.5.1 w całym okresie t0_maxP.
Jeżeli wartości podane przez producenta części nie mieszczą się w zakresach tolerancji określonych w pierwszym akapicie niniejszego punktu, procedury określone w pkt 4.2.5.1, 4.2.5.2 oraz w niniejszym punkcie powtarza się dla innych wartości maksymalnego wyjściowego momentu obrotowego jednostki poddanej badaniu lub innego czasu trwania t0_maxP.
Wartość średnią rzeczywistych zmierzonych wartości w czasie t0_maxP obliczoną dla poszczególnych sygnałów prędkości obrotowej, momentu obrotowego i napięcia wejściowego prądu stałego do falownika (lub przetwornicy DC/DC w stosownych przypadkach) stosuje się jako wartość ostateczną w celu określenia charakterystyki punktu przeciążenia. Oblicza się ponadto wartość średnią rzeczywistej zmierzonej mocy elektrycznej dostarczanej do falownika lub wyprowadzaną z falownika (lub w stosownych przypadkach doprowadzanej do przetwornicy DC/DC lub z niej wyprowadzanej) w czasie t0_maxP.
4.2.6 Badanie cyklu odwzorowania mocy elektrycznej
W badaniu cyklu odwzorowania mocy elektrycznej mierzy się, dla poszczególnych punktów pracy jednostki poddanej badaniu, moc elektryczną dostarczaną do falownika lub wyprowadzaną z falownika (lub w stosownych przypadkach dostarczaną do przetwornicy DC/DC lub z niej wyprowadzaną).
4.2.6.1 Kondycjonowanie wstępne
Jednostkę poddaną badaniu poddaje się kondycjonowaniu (tzn. bez włączania układu) w temperaturze otoczenia wynoszącej 25 ± 10 °C przez co najmniej dwie godziny. Jeżeli badanie przeprowadza się bezpośrednio po innym przebiegu badawczym przeprowadzonym zgodnie z niniejszym załącznikiem, można pominąć lub skrócić okres co najmniej dwugodzinnego kondycjonowania pod warunkiem, że jednostka poddana badaniu pozostaje w komorze do badań, a temperaturę otoczenia w komorze badań utrzymuje się na poziomie 25 ± 10 °C.
4.2.6.2 Mierzone punkty pracy
W przypadku zintegrowanego elektrycznego układu przeniesienia napędu z wielobiegową skrzynią biegów wartości docelowe prędkości obrotowej zgodnie z pkt 4.2.6.2.1 i momentu obrotowego zgodnie z pkt 4.2.6.2.2 ustala się dla każdego biegu do jazdy do przodu.
4.2.6.2.1 Wartości docelowe prędkości obrotowej
Wartości docelowe dla oddzielnego układu maszyny elektrycznej albo dla zintegrowanego elektrycznego układu przeniesienia napędu bez przełączalnych biegów wyznacza się zgodnie z następującymi przepisami:
| (a) | Jako wartości docelowe prędkości obrotowej jednostki poddanej badaniu stosuje się wartości docelowe stosowane do pomiaru przeprowadzanego zgodnie z pkt 4.2.2.2 dla odpowiedniego poziomu napięcia. |
| (b) | Oprócz wartości docelowych określonych w lit. a) powyżej stosuje się wartość docelową prędkości na potrzeby weryfikacji maksymalnego stałego 30-minutowego momentu obrotowego przeprowadzanej zgodnie z pkt 4.2.4.2 dla odpowiedniego poziomu napięcia. |
| (c) | Oprócz wartości docelowych określonych w lit. a) i b) powyżej można określać dalsze wartości docelowe prędkości. |
W przypadku zintegrowanego elektrycznego układu przeniesienia napędu z wielobiegową skrzynią biegów określa się, dla każdego biegu do jazdy do przodu, odrębny zestaw danych obejmujący wartości docelowe prędkości obrotowej jednostki poddanej badaniu w oparciu o następujące przepisy:
| (d) | Wartości docelowe prędkości obrotowej dla biegu o przełożeniu najbliższym jedności (jeżeli przełożenia dwóch biegów są jednakowo odległe od przełożenia wynoszącego jeden, badanie przeprowadza się tylko dla biegu o wyższym przełożeniu), ustalone zgodnie z lit. a)-c), nk,gear_iCT1, stosuje się jako podstawę dalszego etapu określonego w lit. e). |
| (e) | Te wartości docelowe prędkości obrotowej przelicza się na odpowiednie wartości docelowe dla wszystkich pozostałych biegów za pomocą następującego równania: nk,gear = nk,gear_iCT1 × igear_iCT1 / igear gdzie:
|
4.2.6.2.2. Wartości docelowe momentu obrotowego
Wartości docelowe dla oddzielnego układu maszyny elektrycznej albo dla zintegrowanego elektrycznego układu przeniesienia napędu bez przełączalnych biegów wyznacza się zgodnie z następującymi przepisami:
| (a) | Na potrzeby pomiaru określa się co najmniej 10 wartości docelowych momentu obrotowego jednostki poddanej badaniu zarówno po stronie dodatniego momentu obrotowego (tj. w trakcie jazdy) jaki ujemnego momentu obrotowego (tj. w trakcie hamowania). Najniższą i najwyższą wartość docelową momentu obrotowego określa się na podstawie minimalnych i maksymalnych ograniczeń momentu obrotowego, ustalonych zgodnie z pkt 4.2.2.4 dla odpowiedniego poziomu napięcia, gdzie najniższą wartością docelową momentu obrotowego jest łączny minimalny moment obrotowy, Tmin_overall, a najwyższą wartością docelową momentu obrotowego jest łączny maksymalny moment obrotowy, Tmax_overall, ustalone na podstawie tych wartości. |
| (b) | Pozostałych co najmniej osiem różnych wartości docelowych momentu obrotowego musi się mieścić między najniższą a najwyższą wartością docelową momentu obrotowego. Przedział między dwiema sąsiadującymi wartościami docelowymi momentu obrotowego nie może być większy niż 22.5 % łącznego maksymalnego momentu obrotowego jednostki poddanej badaniu ustalonego zgodnie z pkt 4.2.2.4 dla odpowiedniego poziomu napięcia. |
| (c) | Wartość graniczną dla dodatniego momentu obrotowego przy określonej prędkości obrotowej stanowi maksymalne ograniczenie momentu obrotowego przy tej konkretnej wartości docelowej prędkości obrotowej, ustalone zgodnie z pkt 4.2.2.4 dla odpowiedniego poziomu napięcia, pomniejszone o 5 % wartości Tmax_overall. Wszystkie wartości docelowe momentu obrotowego dla określonej wartości docelowej prędkości obrotowej znajdujące się powyżej wartości granicznej dla dodatniego momentu obrotowego przy tej konkretnej prędkości obrotowej zastępuje się jedną zadaną wartością docelową momentu obrotowego na poziomie maksymalnego ograniczenia momentu obrotowego przy tej konkretnej wartości docelowej prędkości obrotowej. |
| (d) | Wartość graniczną dla ujemnego momentu obrotowego przy określonej prędkości obrotowej stanowi minimalne ograniczenie momentu obrotowego przy tej konkretnej wartości docelowej prędkości obrotowej, ustalone zgodnie z pkt 4.2.2.4 dla odpowiedniego poziomu napięcia, pomniejszone o 5 % wartości Tmin_overall. Wszystkie wartości docelowe momentu obrotowego dla określonej wartości docelowej prędkości obrotowej znajdujące się poniżej wartości granicznej dla ujemnego momentu obrotowego przy tej konkretnej prędkości obrotowej zastępuje się jedną zadaną wartością docelową momentu obrotowego na poziomie minimalnego ograniczenia momentu obrotowego przy tej konkretnej wartości docelowej prędkości obrotowej. |
| (e) | Minimalne i maksymalne ograniczenia momentu obrotowego dla określonej wartości docelowej prędkości obrotowej ustala się na podstawie danych wygenerowanych zgodnie z pkt 4.2.2.4 dla odpowiedniego poziomu napięcia, stosując interpolację liniową. |
W przypadku zintegrowanego elektrycznego układu przeniesienia napędu z wielobiegową skrzynią biegów określa się dla każdego biegu odrębny zestaw danych obejmujący wartości docelowe momentu obrotowego jednostki poddanej badaniu w oparciu o następujące przepisy:
| (f) | Wartości docelowe momentu obrotowego dla biegu o przełożeniu najbliższym jedności (jeżeli przełożenia dwóch biegów są jednakowo odległe od przełożenia wynoszącego jeden, badanie przeprowadza się tylko dla biegu o wyższym przełożeniu), ustalone zgodnie z lit. a)-e), Tj,gear_iCT1, stosuje się jako podstawę dalszego etapu określonego w lit. g) i h). |
| (g) | Te wartości docelowe momentu obrotowego przelicza się na odpowiednie wartości docelowe dla wszystkich pozostałych biegów za pomocą następującego równania: Tj,gear = Tj,gear_iCT1 / igear_iCT1 × igear gdzie:
|
| (h) | Podczas właściwego przebiegu badawczego przeprowadzanego zgodnie z pkt 4.2.6.4 nie wymaga się objęcia pomiarami wszystkich wartości docelowych momentu obrotowego Tj,gear o wartości bezwzględnej wyższej niż 10 kNm. |
4.2.6.3 Sygnały objęte pomiarami
W ramach punktów pracy określonych zgodnie z pkt 4.2.6.2 mierzy się moc elektryczną dostarczaną do falownika lub wyprowadzana z falownika (lub w stosownych przypadkach dostarczaną do przetwornicy DC/DC lub z niej wyprowadzaną), a także wyjściowy moment obrotowy i prędkość jednostki poddanej badaniu.
4.2.6.4 Sekwencja badania
Sekwencja badania składa się z wartości docelowych w warunkach ustalonych z określonymi dla każdej wartości docelowej prędkością obrotową i momentem obrotowym zgodnie z pkt 4.2.6.2.
W przypadku wystąpienia nieprzewidzianego przerwania sekwencji badania może ona być kontynuowania zgodnie z następującymi przepisami:
| - | Jednostka poddana badaniu pozostaje w komorze do badań, a temperaturę otoczenia w komorze badań utrzymuje się na poziomie 25 ± 10 °C; |
| - | Przed kontynuacją badania jednostka poddana badaniu pracuje na stanowisku badawczym w celu rozgrzania zgodnie z zaleceniami producenta części. |
| - | Po rozgrzewaniu sekwencję badania kontynuuje się od następnej wartości docelowej prędkości obrotowej niższej niż wartość docelowa prędkości obrotowej, przy której wystąpiło przerwanie. |
| - | Sekwencję badania opisaną w lit. a)-m) poniżej przeprowadza się w odniesieniu do kolejnej niższej wartości docelowej prędkości obrotowej, lecz tylko na potrzeby kondycjonowania wstępnego, bez rejestrowania jakichkolwiek danych pomiarowych. |
| - | Dane pomiarowe rejestruje się począwszy od pierwszego punktu pracy w odniesieniu do wartości docelowej prędkości obrotowej, przy której wystąpiło przerwanie cyklu. |
W przypadku zintegrowanego elektrycznego układu przeniesienia napędu mają zastosowanie następujące przepisy:
| - | Sekwencję badania przeprowadza się kolejno dla każdego biegu, zaczynając od biegu o najwyższym przełożeniu, a następnie kontynuuje się sekwencję badania kolejnych biegów według malejącego przełożenia. |
| - | Badanie wszystkich wartości docelowych w obrębie zestawu danych dla danego biegu, określone zgodnie z pkt 4.2.6.2, musi zostać zakończone przed rozpoczęciem pomiarów na innym biegu. |
| - | Dozwolone jest przerwanie badania po zakończeniu pomiaru dla każdego konkretnego biegu. |
| - | Dozwolone jest stosowanie różnych urządzeń do pomiaru momentu obrotowego. |
Bezpośrednio przed rozpoczęciem badania w odniesieniu do pierwszej wartości docelowej jednostka poddana badaniu pracuje na stanowisku badawczym w celu rozgrzania zgodnie z zaleceniami producenta części. Pierwszą wartość docelową prędkości obrotowej dla biegu faktycznie objętego pomiarem na potrzeby rozpoczęcia badania EPMC określa się jako najniższą wartość docelową prędkości obrotowej.
Pozostałe wartości docelowe dla biegu faktycznie objętego pomiarem stosuje się w następującej kolejności:
| (a) | Pierwszy punkt pracy przy określonej wartości docelowej prędkości obrotowej określa się przy najwyższym momencie obrotowym przy tej konkretnej prędkości. |
| (b) | Następny punkt pracy określa się przy tej samej prędkości i przy najniższej dodatniej (tj. w trakcie jazdy) wartości docelowej momentu obrotowego. |
| (c) | Następny punkt pracy określa się przy tej samej prędkości i przy drugiej co do wielkości najwyższej dodatniej (tj. w trakcie jazdy) wartości docelowej momentu obrotowego. |
| (d) | Następny punkt pracy określa się przy tej samej prędkości i przy przedostatniej co do wielkości najniższej dodatniej (tj. w trakcie jazdy) wartości docelowej momentu obrotowego. |
| (e) | Tę kolejność zmian od pozostałej najwyższej do pozostałej najniższej wartości docelowej momentu obrotowego kontynuuje się do czasu zmierzenia wszystkich dodatnich (tj. w trakcie jazdy) wartości docelowych momentu obrotowego przy określonej wartości docelowej prędkości obrotowej. |
| (f) | Przed przejściem do etapu g) jednostkę poddaną badaniu można schłodzić zgodnie z zaleceniami producenta części przez pracę przy konkretnej wartości docelowej określonej przez producenta części. |
| (g) | Następnie przeprowadza się pomiar ujemnych (tj. w trakcie hamowania) wartości docelowych tarcia przy tej samej wartości docelowej prędkości obrotowej, zaczynając od najniższego momentu obrotowego przy danej prędkości. |
| (h) | Następny punkt pracy określa się przy tej samej prędkości i przy najwyższej ujemnej (tj. w trakcie hamowania) wartości docelowej momentu obrotowego. |
| (i) | Następny punkt pracy określa się przy tej samej prędkości i przy przedostatniej najniższej ujemnej (tj. w trakcie hamowania) wartości docelowej momentu obrotowego. |
| (j) | Następny punkt pracy określa się przy tej samej prędkości i przy drugiej najwyższej ujemnej (tj. w trakcie hamowania) wartości docelowej momentu obrotowego. |
| (k) | Tę kolejność zmian od pozostałej najniższej do pozostałej najwyższej wartości docelowej momentu obrotowego kontynuuje się do czasu zmierzenia wszystkich ujemnych (tj. w trakcie hamowania) wartości docelowych momentu obrotowego przy określonej wartości docelowej prędkości obrotowej. |
| (l) | Przed przejściem do etapu m) jednostkę poddaną badaniu można schłodzić zgodnie z zaleceniami producenta części przez pracę przy konkretnej wartości docelowej określonej przez producenta części. |
| (m) | Badanie kontynuuje się od kolejnej wyższej wartości docelowej prędkości obrotowej przez powtarzanie etapów a)-m) określonej powyżej sekwencji badania do czasu zakończenia badania wszystkich wartości docelowych prędkości obrotowej dla biegu faktycznie objętego pomiarem. |
Wszystkie punkty pracy utrzymuje się przez czas pracy wynoszący co najmniej pięć sekund. W trakcie tego czasu pracy prędkość obrotową jednostki poddanej badaniu utrzymuje się na poziomie wartości docelowej prędkości obrotowej z tolerancją wynoszącą ± 1 % albo 20 obr./min, w zależności od tego, która z tych wartości jest większa. Ponadto w trakcie tego czasu pracy, z wyjątkiem najwyższej i najniższej wartości docelowej momentu obrotowego przy każdej wartości docelowej prędkości obrotowej, moment obrotowy utrzymuje się na poziomie wartości docelowej momentu obrotowego z tolerancją wynoszącą ± 1 % albo ± 5 Nm, w zależności od tego, która z wartości docelowych momentu obrotowego jest większa.
Moc elektryczną dostarczaną do falownika lub wyprowadzaną z falownika (lub w stosownych przypadkach przetwornicy DC/DC), wyjściowy moment obrotowy i prędkość obrotową jednostki poddanej badaniu rejestruje się jako średnia wartość w czasie ostatnich dwóch sekund czasu pracy.
4.3. Przetwarzanie końcowe danych pomiarowych dotyczących jednostki poddanej badaniu
4.3.1 Przepisy ogólne dotyczące przetwarzania końcowego
Wszystkie etapy przetwarzania końcowego określone w pkt 4.3.2-4.3.6 przeprowadza się dla zestawów danych będących wynikiem pomiarów dotyczących dwóch różnych poziomów napięcia określonych w pkt 4.1.3.
4.3.2 Maksymalne i minimalne ograniczenia momentu obrotowego
Dane dotyczące maksymalnych i minimalnych ograniczeń momentu obrotowego ustalonych zgodnie z pkt 4.2.2.4 rozszerza się w drodze ekstrapolacji liniowej (wykorzystując dwa najbliżej położone punkty) do zerowej prędkości obrotowej i do maksymalnej prędkości eksploatacyjnej jednostki poddanej badaniu podanej przez producenta części, jeżeli zarejestrowane dane pomiarowe nie obejmują tych zakresów.
4.3.3 Krzywa oporu
Dane do krzywej oporu, ustalone zgodnie z pkt 4.2.3, modyfikuje się zgodnie z następującymi przepisami:
| (1) | Jeżeli dostarczanie mocy elektrycznej do falownika (lub w stosownych przypadkach przetwornicy DC/DC) ustawiono jako nieaktywne albo odłączono, odpowiednie wartości mocy elektrycznej dostarczanej do falownika (lub w stosownych przypadkach przetwornicy DC/DC) ustawia się na "0". |
| (2) | Jeżeli wał zdawczy jednostki poddanej badaniu nie był połączony z maszyną obciążeniową (tj. hamulcem dynamometrycznym), odpowiednie wartości momentu obrotowego ustawia się na "0". |
| (3) | Dane zmienione zgodnie z pkt 1 i 2 powyżej rozszerza się w drodze ekstrapolacji liniowej do maksymalnej prędkości eksploatacyjnej jednostki poddanej badaniu podanej przez producenta części, jeżeli zarejestrowane dane pomiarowe nie obejmują tych zakresów. |
| (4) | Wartości mocy elektrycznej dostarczanej do falownika (lub, w stosownych przypadkach, do przetwornicy DC/DC) zmodyfikowane zgodnie z pkt 1-3 powyżej uznaje się za wirtualną stratę mocy mechanicznej. Te wartości wirtualnej straty mocy mechanicznej przelicza się na wirtualny opór tarcia przy odpowiedniej prędkości obrotowej wału zdawczego jednostki poddanej badaniu. |
| (5) | W odniesieniu do każdej wartości docelowej prędkości obrotowej wału zdawczego jednostki poddanej badaniu w danych zmienionych zgodnie z pkt 1-3 powyżej wartość wirtualnego oporu tarcia, ustaloną zgodnie z pkt 4 powyżej, dodaje się do rzeczywistego momentu obrotowego maszyny obciążeniowej (tj. hamulca dynamometrycznego) w celu określenia łącznego oporu tarcia jednostki poddanej badaniu jako funkcji prędkości obrotowej. |
| (6) | Wartości łącznego oporu tarcia jednostki poddanej badaniu przy najniższej wartości docelowej prędkości obrotowej, ustalonej na podstawie danych zmienionych zgodnie z pkt 5) powyżej, kopiuje się do nowego wpisu przy prędkości obrotowej 0 obr./min i dodaje do danych zmienionych zgodnie z pkt 5) powyżej. |
4.3.4 Cykl odwzorowania mocy elektrycznej
Dane do cyklu odwzorowania mocy elektrycznej, ustalone zgodnie z pkt 4.2.6.4, rozszerza się, dla każdego biegu do jazdy do przodu objętego oddzielnym pomiarem, zgodnie z następującymi przepisami:
| (1) | Wartości wszystkich par danych dla wyjściowego momentu obrotowego oraz mocy elektrycznej falownika ustalone przy najniższej wartości docelowej prędkości obrotowej kopiuje się do nowego wpisu przy zerowej prędkości obrotowej. |
| (2) | Wartości wszystkich par danych dla wyjściowego momentu obrotowego oraz mocy elektrycznej falownika ustalone przy najwyższej wartości docelowej prędkości obrotowej kopiuje się do nowego wpisu przy najwyższej wartości docelowej prędkości obrotowej pomnożonej przez 1.05. |
| (3) | Jeżeli przy konkretnej wartości docelowej prędkości obrotowej (dotyczy również nowo wprowadzonych danych w ppkt 1 i 2 powyżej) pominięto wartość docelową momentu obrotowego ustaloną zgodnie z przepisami pkt 4.2.6.2.2 lit. a)-g), na potrzeby właściwego pomiaru, zgodnie z pkt 4.2.6.2.2 lit. h), oblicza się nowy punkt danych na podstawie następujących przepisów:
|
| (4) | Dla każdej wartości docelowej prędkości obrotowej (dotyczy również nowo wprowadzonych danych w pkt 1-3 powyżej) oblicza się nowy punkt danych na podstawie danych z wartości docelowej przy najwyższym momencie obrotowym, zgodnie z następującymi przepisami:
|
| (5) | Dla każdej wartości docelowej prędkości obrotowej (dotyczy to również nowo wprowadzonych danych w pkt 1-3 powyżej) oblicza się nowy punkt danych na podstawie danych z wartości docelowej przy najniższym momencie obrotowym, zgodnie z następującymi zasadami:
|
4.3.5 Charakterystyka przeciążenia
Na podstawie danych dotyczących charakterystyki przeciążenia ustalonych zgodnie z pkt 4.2.5.3 określa się liczbowo sprawność, dzieląc średnią mechaniczną moc wyjściową w okresie t0_maxP przez średnią moc elektryczną dostarczaną do falownika lub wyprowadzaną z falownika (lub, w stosownych przypadkach, przetwornicy DC/DC) w czasie t0_maxP.
4.3.6 Maksymalny stały 30-minutowy moment obrotowy
Na podstawie danych ustalonych zgodnie z pkt 4.2.4.3 określa się liczbowo sprawność, dzieląc średnią 30-minutową ciągłą moc przez średnią moc elektryczną dostarczaną do falownika lub wyprowadzaną z falownika (lub, w stosownych przypadkach, przetwornicy DC/DC).
Na podstawie danych pomiarowych dla maksymalnego stałego 30-minutowego momentu obrotowego ustalonych zgodnie z pkt 4.2.4.2 określa się następujące wartości średnie na podstawie rozdzielonych w czasie wartości w ciągu 1 800-sekundowego okresu pomiaru, oddzielnie dla każdego obiegu chłodzenia połączonego z zewnętrznym wymiennik ciepła:
| - | moc chłodzenia, |
| - | temperaturę chłodziwa na wejściu do obiegu chłodzenia jednostki poddanej badaniu. |
Moc chłodzenia ustala się na podstawie właściwej pojemności cieplnej chłodziwa, przepływu masowego chłodziwa oraz różnicy temperatur na wymienniku ciepła na stanowisku badawczym po stronie jednostki poddanej badaniu.
4.4 Przepisy szczególne dotyczące badania zintegrowanych układów przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1
Zintegrowane układy przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 dzieli się wirtualnie na dwie oddzielne części na potrzeby obsługi w narzędziu symulacyjnym, mianowicie na układ maszyny elektrycznej i przekładnię. Postępując zgodnie z przepisami opisanymi w niniejszym punkcie ustala się zatem dwa oddzielne zestawy danych dotyczących części.
Do badania części zintegrowanych układów przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 zastosowanie mają pkt 4.1-4.2 niniejszego załącznika.
Dla zintegrowanych układów przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 moment obrotowy i prędkość mierzy się na wale zdawczym układu (tj. po stronie wyjściowej skrzyni biegów w kierunku kół pojazdu).
Dla zintegrowanych układów przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 nie zezwala się na definiowanie rodzin zgodnie z dodatkiem 13. Pominięcie przebiegów badawczych nie jest zatem dozwolone i wszystkie przebiegi badawcze opisane w pkt 4.2 przeprowadza się dla jednego określonego zintegrowanego układu przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1. Niezależnie od tych przepisów w przypadku zintegrowanych układów przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 pomija się badanie krzywej oporu zgodnie z pkt 4.2.3.
Generowanie danych wejściowych dla układów IHPC typu 1 w oparciu o wartości standardowe nie jest dozwolone.
4.4.1 Przeprowadzane przebiegi badawcze dla zintegrowanych układów przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1
4.4.1.1 Przebiegi badawcze w celu ustalenia łącznej charakterystyki układu
W niniejszym podpunkcie opisano szczegółowo sposób ustalania charakterystyki kompletnego zintegrowanego układu przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1, w tym strat na części układu stanowiącej skrzynię biegów.
Przeprowadza się następujące przebiegi badawcze zgodnie z przepisami określonymi w odpowiednich punktach dla zintegrowanego elektrycznego układu przeniesienia napędu z wielobiegową skrzynią biegów. We wszystkich tych przebiegach badawczych wał wejściowy podający napędowy moment obrotowy do układu jest albo odłączony i obraca się swobodnie, albo jest unieruchomiony i nie obraca się.
Tabela 2a
Przegląd przeprowadzanych przebiegów badawczych zintegrowanego układu przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1
| Przebieg badawczy | Odniesienie do punktu |
| Maksymalne i minimalne ograniczenia momentu obrotowego | 4.2.2 |
| Maksymalny stały 30-minutowy moment obrotowy | 4.2.4 |
| Charakterystyka przeciążenia | 4.2.5 |
| Cykl odwzorowania mocy elektrycznej | 4.2.6 |
Ze względu na fakt, że przepisy określone dla zintegrowanego elektrycznego układu przeniesienia napędu z wielobiegową skrzynia biegów mają zastosowanie do zintegrowanych układów przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1, dla każdego biegu do jazdy do przodu mierzy się cykl odwzorowania mocy elektrycznej zgodnie z pkt 4.2.6.2.
4.4.1.2 Przebiegi badawcze w celu ustalenia strat na części układu stanowiącej skrzynię biegów
W niniejszym podpunkcie opisano szczegółowo sposób ustalania strat na części układu stanowiącej skrzynię biegów.
Układ bada się zatem zgodnie z przepisami pkt 3.3 załącznika VI. Niezależnie od tych przepisów stosuje się przepisy następujące:
| - | Wał wejściowy podający do układu napędowy moment obrotowy jest połączony z hamulcem dynamometrycznym i napędzany przez ten hamulec zgodnie z przepisami pkt 3.3 załącznika VI. |
| - | Odłącza się dostarczanie mocy elektrycznej do falownika lub falowników (lub, w stosownych przypadkach, przetwornicy lub przetwornic DC/DC) z elektrycznego źródła prądu stałego. Aby takie odłączenie było możliwe bez uszkodzenia jakichkolwiek części układu, można zmodyfikować układ w taki sposób, aby do pomiaru zastosować w maszynie elektrycznej lub maszynach elektrycznych imitacje magnesów lub imitacje wirników. |
| - | Zakres momentu obrotowego zdefiniowany w pkt 3.3.6.3 załącznika VI rozszerza się tak, aby obejmował również ujemne wartości momentu obrotowego w taki sposób, że wartości docelowe momentu obrotowego po stronie dodatniej mierzy się również z ujemnym znakiem algebraicznym. |
4.4.2 Przetwarzanie końcowe danych pomiarowych dotyczących zintegrowanych układów przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1
Jeżeli nie określono inaczej, do celów przetwarzania końcowego danych pomiarowych dotyczących zintegrowanych układów przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 obowiązują wszystkie przepisy ustanowione w pkt 4.3.
4.4.2.1 Przetwarzanie końcowe danych dotyczących łącznej charakterystyki układu
Ze wszystkimi danymi pomiarowymi ustalonymi zgodnie z pkt 4.4.1.1 postępuje się zgodnie z przepisami określonymi w pkt 4.3.1-4.3.6. Pomija się przepisy określone w pkt 4.3.3, ponieważ w przypadku zintegrowanych układów przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 nie przeprowadza się pomiaru krzywej oporu zgodnie z pkt 4.2.3. Jeżeli w odpowiednich punktach określono przepisy szczegółowe dla zintegrowanego elektrycznego układu przeniesienia napędu z wielobiegową skrzynia biegów, stosuje się te przepisy szczegółowe.
4.4.2.2 Przetwarzanie końcowe danych dotyczących strat mocy w układzie związanych z częścią będącą skrzynią biegów.
Ze wszystkimi danymi pomiarowymi ustalonymi zgodnie z pkt 4.4.1.2 postępuje się zgodnie z przepisami określonymi w załączniku VI pkt 3.4. Niezależnie od tych przepisów stosuje się przepisy następujące:
| - | Przepisy określone w załączniku VI pkt 3.4.2-3.4.5 stosuje się analogicznie również do ujemnych wartości momentu obrotowego. |
| - | Przepisów określonych w załączniku VI pkt 3.4.6 nie stosuje się. |
4.4.2.3 Przetwarzanie końcowe danych w celu wyprowadzenia określonych danych wirtualnego układu maszyny elektrycznej
W celu ustalenia danych dotyczących części wirtualnego układu maszyny elektrycznej stosuje się następujące etapy. Pomija się następujące etapy przetwarzania końcowego dwóch danych liczbowych dotyczących sprawności, ustalonych zgodnie z pkt 4.3.5 i 4.3.6, ponieważ dane te służą tylko do oceny zgodności certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa.
| (a) | Wszystkie wartości prędkości i momentu obrotowego z danych pomiarowych potraktowanych zgodnie z pkt 4.4.2.1 przelicza się z wału zdawczego na wał wejściowy zintegrowanego układu przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 zgodnie z następującymi równaniami. Jeżeli ten sam przebieg badawczy przeprowadzono dla kilku biegów, przeliczenia dokonuje się dla osobno dla każdego biegu.   gdzie:
|
| (b) | Mapy mocy elektrycznej określone dla każdego biegu do jazdy do przodu zgodnie z pkt 4.4.2.1 i przeliczone na wał wejściowy zgodnie z pkt 4.4.2.3 lit. a) służą jako podstawa do następujących obliczeń. Wszystkie wartości mocy falownika elektrycznego umieszczone na tych mapach mocy elektrycznej przelicza się na odpowiednie mapy dla wirtualnego układu maszyny elektrycznej, odejmując straty na części stanowiącej skrzynię biegów, zgodnie z następującym równaniem:  gdzie:
|
| (c) | Wartości oporu tarcia wirtualnego układu maszyny elektrycznej określa się dla tych samych wartości docelowych prędkości obrotowej, nEM,virt, w odniesieniu do wału wejściowego układu IHPC typu 1, co wartości zastosowane na potrzeby ustalenia krzywej maksymalnego i minimalnego momentu obrotowego wirtualnego układu maszyny elektrycznej. Każdą pojedynczą wartość oporu tarcia w Nm wskazaną przy poszczególnych wartościach docelowych prędkości obrotowej ustawia się na zero. |
| (d) | Moment bezwładności wirtualnego układu maszyny elektrycznej oblicza się, przeliczając wartość lub wartości bezwładności rzeczywistej maszyny lub maszyn elektrycznych, ustalone zgodnie z pkt 8 dodatku 8 do niniejszego załącznika, na odpowiadające im wartości momentu bezwładności w odniesieniu do wału wejściowego układu IHPC typu 1. |
4.4.3 Generowanie danych wejściowych na potrzeby narzędzia symulacyjnego
Ponieważ zintegrowane układy przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 wirtualnie dzieli się na dwie oddzielne części na potrzeby użycia narzędzia symulacyjnego, określa się oddzielne dane wejściowe dotyczące części dla układu maszyny elektrycznej i przekładni. Numer certyfikacji wskazany w danych wejściowych jest taki sam dla obu części - układu maszyny elektrycznej i przekładni.
4.4.3.1 Dane wejściowe wirtualnego układu maszyny elektrycznej
Dane wejściowe wirtualnego układu maszyny elektrycznej generuje się zgodnie z definicjami dla układu maszyny elektrycznej zawartymi w dodatku 15 w oparciu o dane końcowe wynikające z wykonania przepisów określonych w pkt 4.4.2.3.
4.4.3.2 Dane wejściowe wirtualnej przekładni
Dane wejściowe wirtualnej przekładni generuje się zgodnie z definicjami dla przekładni zawartymi w tabelach 1-3 dodatku 12 do załącznika VI w oparciu o dane końcowe wynikające z wykonania przepisów określonych w pkt 4.4.2.2. Wartość parametru »TransmissionType« w tabeli 1 ustawia się na »IHPC Type 1«.
5. Badanie układów akumulatorów lub reprezentatywnych podukładów akumulatorów
Urządzenie do kondycjonowania termicznego jednostki akumulatora poddanej badaniu oraz odnośna pętla kondycjonowania termicznego w ramach wyposażenia stanowiska badawczego muszą być sprawne, aby zapewnić wydajność kondycjonowania termicznego jednostki akumulatora poddanej badaniu, zgodnie z zastosowaniem pojazdu, i muszą zapewniać możliwość przeprowadzenia, z wykorzystaniem wyposażenia stanowiska badawczego, wymaganej procedury badania w granicach roboczych określonych dla jednostki akumulatora poddanej badaniu.
5.1 Przepisy ogólne
Części jednostki akumulatora poddanej badaniu mogą być rozmieszczone w różnych urządzeniach wewnątrz pojazdu.
Jednostkę akumulatora poddaną badaniu kontroluje układ kontroli akumulatorów; wyposażenie stanowiska badawczego musi mieścić się w granicach roboczych przekazywanych przez układ kontroli akumulatorów za pośrednictwem komunikacji po magistrali. Urządzenie do kondycjonowania termicznego jednostki akumulatora poddanej badaniu oraz odnośna pętla kondycjonowania w ramach wyposażenia stanowiska badawczego muszą być sprawne zgodnie ze mechanizmami kontroli układu kontroli akumulatorów, o ile w danej procedurze badania nie wskazano inaczej. Układ kontroli akumulatorów zapewnia możliwość przeprowadzenia, z wykorzystaniem wyposażenia stanowiska badawczego, wymaganej procedury badania w granicach roboczych określonych dla jednostki akumulatora poddanej badaniu. W razie potrzeby producent części dostosowuje oprogramowanie układu kontroli akumulatorów na potrzeby wymaganej procedury badania, lecz odbywa się to w ramach granic roboczych i granic bezpieczeństwa jednostki akumulatora poddanej badaniu.
5.1.1 Warunki wyrównania temperatur
Wyrównanie temperatur zostaje osiągnięte, jeżeli w ciągu 1 godziny odchylenia między temperaturą ogniwa określoną przez producenta części a temperaturą wszystkich punktów pomiaru temperatury ogniwa są niższe niż ± 7 K.
5.1.2 Konwencje dotyczące znaku
5.1.2.1 Prąd
Zmierzone wartości prądu mają znak dodatni dla rozładowania i znak ujemny dla ładowania.
5.1.3 Lokalizacja odniesienia dla temperatury otoczenia
Temperaturę otoczenia mierzy się w odległości 1 m od jednostki akumulatora poddanej badaniu w punkcie wskazanym przez producenta części.
5.1.4 Warunki termiczne
Temperaturę badania akumulatora, tj. docelową temperaturę roboczą jednostki akumulatora poddanej badaniu, określa producent części. Temperatura wszystkich punktów pomiaru temperatury ogniwa musi mieścić się podczas wszystkich przeprowadzanych przebiegów badawczych w granicach określonych przez producenta części.
W przypadku jednostki akumulatora poddanej badaniu z kondycjonowaniem (tj. ogrzewaniem lub chłodzeniem) cieczowym, temperaturę cieczy kondycjonującej rejestruje się na wlocie do jednostki akumulatora poddanej badaniu i musi się ona mieścić w granicach ± 2 K w stosunku do wartości określonej przez producenta części.
W przypadku jednostki akumulatora poddanej badaniu chłodzonej powietrzem temperatura tej jednostki w punkcie wskazanym przez producenta części musi się mieścić w granicach +0/-20 K w stosunku do maksymalnej wartości określonej przez producenta części.
W przypadku wszystkich przebiegów badawczych dostępna moc chłodzenia lub ogrzewania na stanowisku badawczym musi być ograniczona do wartości wskazanej przez producenta części. Wartość tę rejestruje się razem z danymi dotyczącymi badania.
Dostępną moc chłodzenia lub ogrzewania na stanowisku badawczym określa się w oparciu o następujące procedury i rejestruje wraz z rzeczywistymi danymi dotyczącymi badania części:
| (1) | W przypadku kondycjonowania cieczowego - na podstawie przepływu masowego cieczy kondycjonującej i różnicy temperatur na wymienniku ciepła po stronie jednostki akumulatora poddanej badaniu. |
| (2) | W przypadku kondycjonowania elektrycznego na podstawie napięcia i natężenia prądu. Producent części może zmodyfikować połączenie elektryczne tej jednostki kondycjonującej do celów certyfikacji jednostki akumulatora poddanej baterii, aby umożliwić pomiar właściwości tej jednostki akumulatora bez uwzględniania mocy wymaganej do zasilania układu kondycjonowania (np. jeżeli układ ten jest bezpośrednio zainstalowany i podłączony w obrębie jednostki akumulatora). Niezależnie od tych przepisów rejestruje się wymaganą moc chłodzenia lub ogrzewania elektrycznego doprowadzaną z zewnątrz do jednostki akumulatora poddanej badaniu z jednostki kondycjonowania. |
| (3) | W przypadku innych rodzajów kondycjonowania - na podstawie właściwej oceny technicznej i rozmów z organem udzielającym homologacji typu. |
5.2 Cykle przygotowawcze
Jednostkę akumulatora poddaną badaniu poddaje się kondycjonowaniu przez wykonanie maksymalnie pięciu cykli pełnego rozładowania, a następnie pełnego naładowania w celu zapewnienia stabilizacji działania układu przed rozpoczęciem właściwego badania.
Następujące po sobie cykle pełnego rozładowania, a następnie pełnego naładowania wykonuje się w określonej przez producenta części temperaturze roboczej, aż do osiągnięcia stanu »po kondycjonowaniu wstępnym«. Kryterium stanu »po kondycjonowaniu wstępnym« jednostki akumulatora poddanej badaniu jest to, że rozładowana pojemność podczas dwóch kolejnych rozładowań nie zmienia się o wartość większą niż 3 % pojemności znamionowej lub że wykonano pięć powtórzeń.
Napięcie jednostki akumulatora poddanej badaniu po zakończeniu rozładowania nie może spaść poniżej napięcia minimalnego zalecanego przez producenta części (napięcie minimalne oznacza najniższe napięcie przy rozładowaniu bez nieodwracalnego uszkodzenia jednostki akumulatora poddanej badaniu). Kryteria zakończenia cykli pełnego rozładowania i pełnego ładowania określa producent części.
5.2.1 Poziomy prądu w cyklach przygotowawczych w odniesieniu do układu akumulatorów o dużej gęstości mocy
Rozładowanie przeprowadza się prądem o natężeniu 2C; ładowanie przeprowadza się zgodnie z zaleceniami producenta części.
5.2.2 Poziomy prądu w cyklach przygotowawczych Kondycjonowanie wstępne układu akumulatorów o dużej gęstości energii
Rozładowanie przeprowadza się prądem o natężeniu 1/3C; ładowanie przeprowadza się zgodnie z zaleceniami producenta części.
5.3 Cykl standardowy
Celem cyklu standardowego (SC) jest zapewnienie takiego samego stanu początkowego dla każdego dedykowanego badania jednostki akumulatora poddanej badaniu, jak również naładowanej energii do celów oceny zgodności zgodnie z dodatkiem 12. Przeprowadza się go w określonej przez producenta części zadanej temperaturze roboczej.
5.3.1 Cykl standardowy w odniesieniu do układu akumulatorów o dużej gęstości mocy
Cykl standardowy w odniesieniu do układu akumulatorów o dużej gęstości mocy obejmuje następujące występujące kolejno po sobie zdarzenia: standardowe rozładowanie, okres spoczynku, standardowe ładowanie i drugi okres spoczynku.
Standardową procedurę rozładowania przeprowadza się prądem 1C aż do osiągnięcia minimalnego poziomu naładowania; ładowanie przeprowadza się zgodnie z zaleceniami producenta części.
Okres spoczynku rozpoczyna się bezpośrednio po zakończeniu rozładowywania i trwa 30 minut.
Standardową procedurę ładowania przeprowadza zgodnie ze specyfikacjami producenta części dotyczącymi kryteriów zakończenia ładowania, jak również mających zastosowanie ograniczeń czasowych w odniesieniu do całej procedury ładowania.
Drugi okres spoczynku rozpoczyna się bezpośrednio po zakończeniu ładowania i trwa 30 minut.
5.3.2 Cykl standardowy w odniesieniu do układu akumulatorów o dużej gęstości energii
Cykl standardowy w odniesieniu do układu akumulatorów o dużej gęstości energii obejmuje następujące występujące kolejno po sobie zdarzenia: standardowe rozładowanie, okres spoczynku, standardowe ładowanie i drugi okres spoczynku.
Standardową procedurę rozładowania przeprowadza się prądem 1/3C aż do osiągnięcia minimalnego poziomu naładowania; ładowanie przeprowadza się zgodnie z zaleceniami producenta części.
Okres spoczynku rozpoczyna się bezpośrednio po zakończeniu rozładowywania i trwa 30 minut.
Standardową procedurę ładowania przeprowadza zgodnie ze specyfikacjami producenta części dotyczącymi kryteriów zakończenia ładowania, jak również mających zastosowanie ograniczeń czasowych w odniesieniu do całej procedury ładowania.
Drugi okres spoczynku rozpoczyna się bezpośrednio po zakończeniu ładowania i trwa 30 minut.
5.4 Przeprowadzane przebiegi badawcze
Przed przeprowadzeniem wszelkich przebiegów badawczych zgodnie z niniejszym punktem jednostka akumulatora poddana badaniu podlega przepisom zgodnie z pkt 5.2.
5.4.1 Procedura badania dotyczącego pojemności znamionowej
W badaniu tym mierzy się pojemność znamionową jednostki akumulatora poddanej badaniu w Ah przy współczynnikach rozładowania prądem ciągłym.
5.4.1.1 Sygnały objęte pomiarami
Podczas przeprowadzania kondycjonowania wstępnego, cyklów standardowych i właściwego przebiegu badawczego rejestruje się co najmniej następujące sygnały:
| - | prąd ładowania/rozładowania na zaciskach jednostki akumulatora poddanej badaniu, |
| - | napięcie na zaciskach jednostki akumulatora poddanej badaniu, |
| - | temperatury we wszystkich punktach pomiarowych jednostki akumulatora poddanej badaniu, |
| - | temperaturę otoczenia na stanowisku badawczym, |
| - | moc ogrzewania lub chłodzenia w odniesieniu do jednostki akumulatora poddanej badaniu. |
5.4.1.2 Przebieg badawczy
Po pełnym naładowaniu jednostki akumulatora poddanej badaniu zgodnie ze specyfikacjami producenta części i wyrównaniu temperatur zgodnie z pkt 5.1.1 przeprowadza się cykl standardowy zgodnie z pkt 5.3.
Właściwy przebieg badawczy rozpoczyna się w ciągu 3 godzin od zakończenia cyklu standardowego, w przeciwnym razie cykl standardowy musi zostać powtórzony.
Właściwy przebieg badawczy przeprowadza się w temperaturze pokojowej i obejmuje on rozładowywanie prądem ciągłym i następujące współczynniki rozładowania:
| - | w odniesieniu do układu akumulatorów o dużej gęstości mocy - do pojemności znamionowej 1C w Ah podanej przez producenta części. |
| - | w odniesieniu do układu akumulatorów o dużej gęstości energii - do pojemności znamionowej 1/3C w Ah podanej przez producenta części. |
Wszystkie badania rozładowywania kończy się w warunkach minimalnych zgodnie ze specyfikacjami producenta części.
5.4.1.3 Interpretacja wyników
Pojemność w Ah uzyskaną na podstawie prądu w akumulatorze zintegrowanym w czasie właściwego przebiegu badawczego zgodnie z pkt 5.4.1.2 traktuje się jako wartość pojemności znamionowej.
5.4.1.4 Dane, które mają być zgłaszane
Zgłasza się następujące dane:
| - | pojemność znamionową ustaloną zgodnie z pkt 5.4.1.3, |
| - | Wartości średnie wszystkich sygnałów zarejestrowanych zgodnie z pkt 5.4.1.1 w ramach właściwego przebiegu badawczego. |
Do celów badania zgodności produkcji oblicza się również następujące wartości:
| - | całkowitą energię naładowania, Echa, od 20 do 80 % poziomu naładowania podczas cyklu standardowego przeprowadzonego przed właściwym przebiegiem badawczym. |
| - | Całkowitą energię rozładowania, Edis, od 80 do 20 % poziomu naładowania podczas właściwego przebiegu badawczego. |
Wszystkie wykorzystane wartości poziomu naładowania oblicza się na podstawie rzeczywistej zmierzonej pojemności znamionowej ustalonej zgodnie z pkt 5.4.1.3.
Całkowitą sprawność energetyczną ηBAT oblicza się dzieląc całkowitą energia rozładowania Edis przez całkowitą energię naładowania Echa o zgłasza w dokumencie informacyjnym zgodnie z dodatkiem 5.
5.4.2 Procedura badania dotyczącego napięcia obwodu otwartego, oporu wewnętrznego i granic natężenia
W badaniu tym określa się opór omowy w odniesieniu do warunków rozładowania i ładowania, jak również napięcie obwodu otwartego jednostki akumulatora poddanej badaniu w funkcji poziomu naładowania. Ponadto weryfikuje się maksymalny prąd rozładowania i ładowania podany przez producenta części.
5.4.2.1 Przepisy ogólne dotyczące badań
Wszystkie wykorzystane wartości poziomu naładowania oblicza się na podstawie rzeczywistej zmierzonej pojemności znamionowej ustalonej zgodnie z pkt 5.4.1.3.
Jedynie w przypadku gdy jednostka akumulatora poddana badaniu osiąga granicę napięcia rozładowania podczas rozładowywania prąd należy zmniejszyć w taki sposób, aby napięcie na zaciskach jednostki utrzymywało się na granicy napięcia rozładowania przez cały czas trwania impulsu rozładowania.
Jedynie w przypadku gdy jednostka akumulatora poddana badaniu osiąga podczas ładowania granicę napięcia ładowania prąd należy zmniejszyć w taki sposób, aby napięcie na zaciskach jednostki utrzymywało się na granicy napięcia ładowania przez cały czas trwania impulsu ładowania regeneracyjnego.
W przypadku gdy wyposażenie badawcze nie jest w stanie dostarczyć wartości prądu z wymaganą dokładnością ± 1 % wartości docelowej w ciągu 100 ms po zmianie profilu prądowy odnośne zarejestrowane dane należy odrzucić i nie należy obliczać na ich podstawie żadnych powiązanych wartości napięcia obwodu otwartego i oporu wewnętrznego.
W przypadku gdy granice robocze podane przez układ kontroli akumulatorów za pośrednictwem komunikacji po magistrali wymagają zmniejszenia prądu, aby mieścił się w granicach roboczych jednostki akumulatora poddanej badaniu, wyposażenie stanowiska badawczego powinno zmniejszyć odpowiedni prąd docelowy zgodnie z żądaniami z BCU.
5.4.2.2 Sygnały objęte pomiarami
Podczas przeprowadzania kondycjonowania wstępnego i właściwego przebiegu badawczego zarejestruje się co najmniej następujące sygnały:
| - | prąd rozładowania na zaciskach jednostki akumulatora poddanej badaniu, |
| - | napięcie na zaciskach jednostki akumulatora poddanej badaniu, |
| - | temperatury we wszystkich punktach pomiarowych jednostki akumulatora poddanej badaniu, |
| - | temperaturę otoczenia na stanowisku badawczym, |
| - | moc ogrzewania lub chłodzenia w odniesieniu do jednostki akumulatora poddanej badaniu. |
5.4.2.3 Przebieg badawczy
5.4.2.3.1 Kondycjonowanie wstępne
Po pełnym naładowaniu jednostki akumulatora poddanej badaniu zgodnie ze specyfikacjami producenta części i wyrównaniu temperatur zgodnie z pkt 5.1.1 przeprowadza się cykl standardowy zgodnie z pkt 5.3.
Właściwy przebieg badawczy rozpoczyna się od godziny do 3 godzin od zakończenia cyklu standardowego, w przeciwnym razie cykl standardowy musi zostać powtórzony. W przeciwnym przypadku powtarza się procedurę opisaną w poprzednim punkcie.
5.4.2.3.2 Procedura badania
W odniesieniu do układu akumulatorów o dużej gęstości mocy badanie przeprowadza się przy pięciu różnych poziomach naładowania: 80, 65, 50, 35 i 20 %.
W odniesieniu do układu akumulatorów o dużej gęstości energii badanie przeprowadza się przy pięciu różnych poziomach naładowania: 90, 70, 50, 35 i 20 %.
Na ostatnim etapie przy poziomie naładowania równym 20 % producent części może zmniejszyć maksymalny prąd rozładowania jednostki akumulatora poddanej badaniu, aby poziom naładowania utrzymywał się powyżej minimalnego poziomu naładowania zgodnie ze specyfikacjami producenta części i aby uniknąć głębokiego rozładowania.
Przed rozpoczęciem właściwych przebiegów badawczych przy każdym z poziomów naładowania przeprowadza się kondycjonowanie wstępne jednostki akumulatora poddanej badaniu zgodnie z pkt 5.4.2.3.1.
W celu osiągnięcia wymaganego poziomu naładowania do badań od stanu początkowego jednostki akumulatora poddanej badaniu należy ją rozładować prądem ciągłym 1C w przypadku HPBS i 1/3C w przypadku HEBS, przestrzegając przed rozpoczęciem następnego pomiaru 30-minutowego okresu spoczynku.
Przed rozpoczęciem badania producent części deklaruje maksymalny prąd ładowania i rozładowania przy każdym z poszczególnych poziomów naładowania, który to maksymalny prąd można stosować przez cały czas trwania odpowiedniego przyrostu impulsu prądowego w czasie określonego zgodnie z tabelą 3 w odniesieniu do HPBS i tabelą 4 w odniesieniu do HEBS.
Właściwy przebieg badawczy przeprowadza się w temperaturze pokojowej i obejmuje on profil prądowy zgodnie z tabelą 3 w przypadku HPBS i zgodnie z tabelą 4 w przypadku HEBS.
Tabela 3
Profil prądowy dotyczący układu akumulatorów o dużej gęstości mocy
| Przyrost w czasie [s] | Łączny czas [s] | Prąd docelowy |
| 0 | 0 | 0 |
| 20 | 20 | Idischg_max/33 |
| 40 | 60 | 0 |
| 20 | 80 | Ichg_max/33 |
| 40 | 120 | 0 |
| 20 | 140 | Idischg_max/32 |
| 40 | 180 | 0 |
| 20 | 200 | Ichg_max/32 |
| 40 | 240 | 0 |
| 20 | 260 | Idischg_max/3 |
| 40 | 300 | 0 |
| 20 | 320 | Ichg_max/3 |
| 40 | 360 | 0 |
| 20 | 380 | Idischg_max |
| 40 | 420 | 0 |
| 20 | 440 | Ichg_max |
| 40 | 480 | 0 |
Tabela 4
Profil prądowy dotyczący układu akumulatorów o dużej gęstości energii
| Przyrost w czasie [s] | Łączny czas [s] | Prąd docelowy |
| 0 | 0 | 0 |
| 120 | 120 | Idischg_max/33 |
| 40 | 160 | 0 |
| 120 | 280 | Ichg_max/33 |
| 40 | 320 | 0 |
| 120 | 440 | Idischg_max/32 |
| 40 | 480 | 0 |
| 120 | 600 | Ichg_max/32 |
| 40 | 640 | 0 |
| 120 | 760 | Idischg_max/3 |
| 40 | 800 | 0 |
| 120 | 920 | Ichg_max/3 |
| 40 | 960 | 0 |
| 120 | 1080 | Idischg_max |
| 40 | 1120 | 0 |
| 120 | 1240 | Ichg_max |
| 40 | 1280 | 0 |
Gdzie
| Idischg_max | jest wartością bezwzględną maksymalnego prądu rozładowania określoną przez producenta części w odniesieniu do określonego poziomu naładowania, którą można stosować przez cały czas trwania odpowiedniego przyrostu impulsu prądowego w czasie |
| Ichg_max | jest wartością bezwzględną maksymalnego prądu ładowania określoną przez producenta części w odniesieniu do określonego poziomu naładowania, którą można stosować przez cały czas trwania odpowiedniego przyrostu impulsu prądowego w czasie |
Napięcie w chwili zero przebiegu badawczego przed wystąpieniem pierwszej zmiany w prądzie docelowym, tj. V0, mierzy się jako wartość średnią w czasie 100 ms.
W przypadku HPBS dokonuje się pomiaru następujących wartości napięcia i natężenia:
| (1) | W odniesieniu do każdego poszczególnego poziomu impulsu prądu rozładowania i ładowania określonego w tabeli 3 dokonuje się pomiaru napięcia przy prądzie zerowym jako wartości średniej z ostatniej sekundy przed wystąpieniem zmiany w prądzie docelowym, tj. Vdstart w odniesieniu do rozładowania i Vcstart w odniesieniu do ładowania. |
| (2) | W odniesieniu do każdego poszczególnego poziomu impulsu prądu rozładowania określonego w tabeli 3 pomiar napięcia przeprowadza się 2, 10 i 20 sekund po wystąpieniu zmiany w prądzie docelowym (Vd2, Vd10, Vd20), a odpowiadające mu natężenie (Id2, Id10 i Id20) mierzy się jako wartość średnią przez 100 ms. |
| (3) | W odniesieniu do każdego poszczególnego poziomu impulsu prądu ładowania określonego w tabeli 3 pomiar napięcia przeprowadza się 2, 10 i 20 sekund po wystąpieniu zmiany w prądzie docelowym (Vc2, Vc10, Vc20), a odpowiadające mu natężenie (Ic2, Ic10 i Ic20) mierzy się jako wartość średnią przez 100 ms. |
W tabeli 5 przedstawiono przegląd wartości napięcia i natężenia prądu, które poddaje się pomiarom w czasie po wystąpieniu zmiany prądu docelowego w przypadku HPBS.
Tabela 5
Punkty pomiaru napięcia przy każdym z poszczególnych poziomów impulsu prądu (ładowania i rozładowania) w przypadku układu akumulatorów o dużej gęstości mocy
| Czas po wystąpieniu zmiany w prądzie docelowym [s] | Rozładowanie (D) lub ładowanie (C) | Napięcie | Prąd |
| 2 | D | Vd2 | Id2 |
| 10 | D | Vd10 | Id10 |
| 20 | D | Vd20 | Id20 |
| 2 | C | Vc2 | Ic2 |
| 10 | C | Vc10 | Ic10 |
| 20 | C | Vc20 | Ic20 |
W przypadku HEBS dokonuje się pomiaru następujących wartości napięcia i natężenia:
| (1) | W odniesieniu do każdego poszczególnego poziomu impulsu prądu ładowania określonego w tabeli 4 dokonuje się pomiaru napięcia przy prądzie zerowym jako wartości średniej z ostatniej sekundy przed wystąpieniem zmiany w prądzie docelowym, tj. Vdstart w odniesieniu do rozładowania i Vcstart w odniesieniu do ładowania. |
| (2) | W odniesieniu do każdego poszczególnego poziomu impulsu prądu rozładowania określonego w tabeli 4 pomiar napięcia przeprowadza się 2, 10, 20 i 120 sekund po wystąpieniu zmiany w prądzie docelowym (Vd2, Vd10, Vd20 i Vd120) a odpowiadające mu natężenie (Id2, Id10, Id20 i Id120) mierzy się jako wartość średnią przez 100 ms. |
| (3) | W odniesieniu do każdego poszczególnego poziomu impulsu prądu ładowania określonego w tabeli 4 pomiar napięcia przeprowadza się 2, 10, 20 i 120 sekund po wystąpieniu zmiany w prądzie docelowym (Vc2, Vc10, Vc20 i Vc120) a odpowiadające mu natężenie (Ic2, Ic10, Ic20 i Ic120) mierzy się jako wartość średnią przez 100 ms. |
W tabeli 6 przedstawiono przegląd wartości napięcia i natężenia prądu, które poddaje się pomiarom w czasie po wystąpieniu zmiany prądu docelowego w przypadku HEBS.
Tabela 6
Punkty pomiaru napięcia przy każdym z poszczególnych poziomów impulsu prądu (ładowania i rozładowania) w przypadku układu akumulatorów o dużej gęstości mocy
| Czas po wystąpieniu zmiany w prądzie docelowym [s] | Rozładowanie (D) lub ładowanie (C) | Napięcie | Prąd |
| 2 | D | Vd2 | Id2 |
| 10 | D | Vd10 | Id10 |
| 20 | D | Vd20 | Id20 |
| 120 | D | Vd120 | Id120 |
| 2 | C | Vc2 | Ic2 |
| 10 | C | Vc10 | Ic10 |
| 20 | C | Vc20 | Ic20 |
| 120 | C | Vc120 | Ic120 |
5.4.2.4 Interpretacja wyników
W odniesieniu do każdego poziomu naładowania zmierzonego zgodnie z pkt 5.4.2.3 należy oddzielnie przeprowadzić następujące obliczenia.
5.4.2.4.1. Obliczenia dotyczące układu akumulatorów o dużej gęstości mocy
| (1) | W odniesieniu do każdego poszczególnego poziomu impulsu prądu rozładowania określonego w tabeli 3 wartości oporu wewnętrznego oblicza się, na podstawie wartości napięcia i natężenia zmierzonych zgodnie z pkt 5.4.2.3, zgodnie z następującymi równaniami:
|
| (2) | Opór wewnętrzny w odniesieniu do rozładowania RId2_avg, RId10_avg, RId20_avg oblicza się jako średnią, w odniesieniu do wszystkich poziomów impulsu prądowego określonych w tabeli 3 na podstawie poszczególnych wartości obliczonych zgodnie z ppkt 1. |
| (3) | W odniesieniu do każdego poszczególnego poziomu impulsu prądu ładowania określonego w tabeli 3 wartości oporu wewnętrznego oblicza się, na podstawie wartości napięcia i natężenia zmierzonych zgodnie z pkt 5.4.2.3, zgodnie z następującymi równaniami:
|
| (4) | Opór wewnętrzny w odniesieniu do ładowania RIc2_avg, RIc10_avg, RIc20_avg oblicza się jako średnią, w odniesieniu do wszystkich poziomów impulsu prądowego określonych w tabeli 3, na podstawie poszczególnych wartości obliczonych zgodnie z ppkt 3. |
| (5) | Wartości całkowitego oporu wewnętrznego RI2, RI10 i RI20 oblicza się jako średnią ze wszystkich odpowiednich wartości dotyczących rozładowania i ładowania obliczonych na podstawie ppkt 2 i 4. |
| (6) | Napięcie obwodu otwartego stanowi wartość V0 zmierzoną zgodnie z pkt 5.4.2.3 w odniesieniu do odpowiedniego poziomu naładowania. |
| (7) | Granice maksymalnego prądu rozładowania oblicza się jako wartość średnią z 20 sekund przy prądzie docelowym Idischg_max w odniesieniu do każdego poziomu naładowania zmierzonego zgodnie z pkt 5.4.2.3. |
| (8) | Granice maksymalnego prądu ładowania oblicza się jako wartość średnią z 20 sekund przy prądzie docelowym Ichg_max w odniesieniu do każdego poziomu naładowania zmierzonego zgodnie z pkt 5.4.2.3. Jako wartości ostateczne zgłasza się wartości bezwzględne wyników. |
5.4.2.4.2 Obliczenia dotyczące HEBS
| (1) | W odniesieniu do każdego poszczególnego poziomu impulsu prądu rozładowania określonego w tabeli 4 wartości oporu wewnętrznego oblicza się, na podstawie wartości napięcia i natężenia zmierzonych zgodnie z pkt 5.4.2.3, zgodnie z następującymi równaniami: równaniami:
|
| (2) | Opór wewnętrzny w odniesieniu do rozładowania RId2_avg, RId10_avg, RId20_avg i RId120_avg oblicza się jako średnią, w odniesieniu do wszystkich poziomów impulsu prądowego określonych w tabeli 4, na podstawie poszczególnych wartości obliczonych zgodnie z ppkt 1. |
| (3) | Dla każdego z impulsów prądu ładowania określonego w tabeli 4 wartości oporu wewnętrznego oblicza się, na podstawie wartości napięcia i natężenia zmierzonych zgodnie z pkt 5.4.2.3, zgodnie z następującymi równaniami: równaniami:
|
| (4) | Opór wewnętrzny w odniesieniu do ładowania RIc2_avg, RIc10_avg, RIc20_avg i RIc120_avg oblicza się jako średnią, w odniesieniu do wszystkich poziomów impulsu prądowego określonych w tabeli 4, na podstawie poszczególnych wartości obliczonych zgodnie z ppkt 3. |
| (5) | Wartości całkowitego oporu wewnętrznego RI2, RI10, RI20 i RI120 oblicza się jako średnią ze wszystkich odpowiednich wartości dotyczących rozładowania i ładowania obliczonych na podstawie ppkt 2 i 4. |
| (6) | Napięcie obwodu otwartego stanowi wartość V0 zmierzoną zgodnie z pkt 5.4.2.3 w odniesieniu do odpowiedniego poziomu naładowania. |
| (7) | Granice maksymalnego prądu rozładowania oblicza się jako wartość średnią ze 120 sekund przy prądzie docelowym Idischg_max w odniesieniu do każdego poziomu naładowania zmierzonego zgodnie z pkt 5.4.2.3. |
| (8) | Granice maksymalnego prądu ładowania oblicza się jako wartość średnią ze 120 sekund przy prądzie docelowym Ichg_max w odniesieniu do każdego poziomu naładowania zmierzonego zgodnie z pkt 5.4.2.3. Jako wartości ostateczne zgłasza się wartości bezwzględne wyników. |
5.5. Przetwarzanie końcowe danych pomiarowych dotyczących jednostki akumulatora poddanej badaniu
Wartości napięcia obwodu otwartego zależne od poziomu naładowania określa się na podstawie wartości ustalonych dla poszczególnych poziomów naładowania zgodnie z pkt 5.4.2.4.1 ppkt 6 w przypadku HPBS i 5.4.2.4.2 w przypadku HEBS.
Poszczególne wartości napięcia obwodu otwartego zależne od poziomu naładowania określa się na podstawie wartości ustalonych dla poszczególnych poziomów naładowania zgodnie z pkt 5.4.2.4.1 ppkt 5 w przypadku HPBS i 5.4.2.4.2 w przypadku HEBS.
Granice maksymalnego prądu ładowania i maksymalnego prądu rozładowania określa się na podstawie wartości zadeklarowanych przez producenta części przed badaniem. Jeżeli określona wartość maksymalnego prądu ładowania lub maksymalnego prądu rozładowania ustalona zgodnie z pkt 5.4.2.4.1 ppkt 7 i 8 w przypadku HPBS i pkt 5.4.2.4.2 w przypadku HEBS odbiega o ponad ± 2 % od wartości zadeklarowanej przez producenta części przed badaniem, zgłasza się odpowiednią wartość ustaloną zgodnie z pkt 5.4.2.4.1 ppkt 7 i 8 w przypadku HPBS i pkt 5.4.2.4.2 w przypadku HEBS.
6. Badanie układów kondensatorów lub reprezentatywnych podukładów kondensatorów
6.1 Przepisy ogólne
Części układu kondensatorów jednostki kondensatora poddanej badaniu mogą być rozmieszczone w różnych urządzeniach wewnątrz pojazdu.
Właściwości dotyczące kondensatora prawie nigdy nie zależ od poziomu jego naładowania lub natężenia (odpowiednio). W związku z tym do obliczenia parametrów wejściowych modelu zaleca się przeprowadzenie tylko jednego przebiegu badawczego.
6.1.1 Konwencje dotyczące znaku w przypadku wartości prądu
Zmierzone wartości prądu mają znak dodatni dla rozładowania i znak ujemny dla ładowania.
6.1.2 Lokalizacja odniesienia dla temperatury otoczenia
Temperaturę otoczenia mierzy się w odległości 1 m od jednostki kondensatora poddanej badaniu w punkcie wskazanym przez producenta tej jednostki.
6.1.3 Warunki termiczne
Temperaturę badania kondensatora, tj. docelową temperaturę roboczą jednostki kondensatora poddanej badaniu, określa producent części. Temperatura wszystkich punktów pomiaru temperatury ogniwa kondensatora musi mieścić się podczas wszystkich przeprowadzanych przebiegów badawczych w granicach określonych przez producenta części.
W przypadku jednostki kondensatora poddanej badaniu z kondycjonowaniem (tj. ogrzewaniem lub chłodzeniem) cieczowym, temperaturę cieczy kondycjonującej rejestruje się na wlocie do jednostki kondensatora poddanej badaniu i musi się ona mieścić w granicach ± 2 K w stosunku do wartości określonej przez producenta części.
W przypadku jednostki kondensatora poddanej badaniu chłodzonej powietrzem temperatura w punkcie wskazanym przez producenta części musi się mieścić w granicach +0/-20 K w stosunku do maksymalnej wartości określonej przez producenta części.
W przypadku wszystkich przebiegów badawczych dostępna moc chłodzenia lub ogrzewania na stanowisku badawczym musi być ograniczona do wartości wskazanej przez producenta części. Wartość tę rejestruje się razem z danymi dotyczącymi badania.
Dostępną moc chłodzenia lub ogrzewania na stanowisku badawczym określa się w oparciu o następujące procedury i rejestruje wraz z rzeczywistymi danymi dotyczącymi badania części:
| (1) | W przypadku kondycjonowania cieczowego - na podstawie przepływu masowego cieczy kondycjonującej i różnicy temperatur na wymienniku ciepła po stronie jednostki kondensatora poddanej badaniu. |
| (2) | W przypadku kondycjonowania elektrycznego na podstawie napięcia i natężenia prądu. Producent części może zmodyfikować połączenie elektryczne tej jednostki kondycjonującej do celów certyfikacji jednostki kondensatora poddanej baterii, aby umożliwić pomiar właściwości tej jednostki kondensatora bez uwzględniania mocy wymaganej do zasilania układu kondycjonowania (np. jeżeli układ ten jest bezpośrednio zainstalowany i podłączony w obrębie jednostki kondensatora). Niezależnie od tych przepisów rejestruje się wymaganą moc chłodzenia lub ogrzewania elektrycznego doprowadzaną z zewnątrz do jednostki kondensatora poddanej badaniu z jednostki kondycjonowania. |
| (3) | W przypadku innych rodzajów kondycjonowania - na podstawie właściwej oceny technicznej i rozmów z organem udzielającym homologacji typu |
6.2 Warunki badania
| a) | Jednostkę kondensatora poddaną badaniu umieszcza się komorze do badań z regulacją temperatury. Temperatura otoczenia ustala się na poziomie 25 ± 10 °C; |
| b) | Pomiaru napięcia dokonuje się na stykach jednostki kondensatora poddanej badaniu. |
| c) | Układ kondycjonowania termicznego jednostki kondensatora poddanej badaniu oraz odnośna pętla kondycjonowania w ramach wyposażenia stanowiska badawczego muszą być w pełni sprawne zgodnie z odpowiednimi środkami kontroli. |
| d) | Układ kontroli zapewnia możliwość przeprowadzenia, z wykorzystaniem wyposażenia stanowiska badawczego, wymaganej procedury badania w granicach roboczych określonych dla jednostki kondensatora poddanej badaniu. W razie potrzeby producent jednostki kondensatora poddanej badaniu dostosowuje oprogramowanie układu kontroli na potrzeby wymaganej procedury badania. |
6.3 Badanie właściwości jednostki kondensatora
| a) | Po pełnym naładowaniu, a następnie całkowitym rozładowaniu kondensatora UUT do najniższego napięcia roboczego zgodnie z metodą ładowania określoną przez producenta części, należy go poddać relaksacji przez co najmniej 2 godziny, ale nie dłużej niż 6 godzin. |
| b) | Temperatura jednostki kondensatora poddanej badaniu na początku badania musi wynosić 25 ± 2 °C. Można jednak wybrać temperaturę równą 45 ± 2 °C, przy czym zgłasza się organowi udzielającemu homologacji typu lub organowi certyfikującemu, że ten poziom temperatury jest bardziej reprezentatywny dla warunków typowego zastosowania. |
| c) | Po czasie relaksacji przeprowadza się pełny cykl ładowania i rozładowania zgodnie z rysunkiem 2 przy użyciu prądu ciągłego Itest. Itest jest maksymalnym dopuszczalnym ciągłym prądem określonym w odniesieniu do jednostki kondensatora poddanej badaniu przez producenta części. |
| d) | Po odczekaniu co najmniej 30 sekund (t0 do t1) jednostkę kondensatora poddaną badaniu ładuje się prądem ciągłym Itest do osiągnięcia maksymalnego napięcia roboczego V max. Następnie przerywa się ładowanie, a jednostkę kondensatora poddaną badaniu poddaje się relaksacji przez 30 sekund (t2 do t3) do ustabilizowania się ostatecznej wartości napięcia V b, po czym rozpoczyna się rozładowanie. Jednostkę kondensatora poddaną badaniu rozładowuje się prądem ciągłym Itest do osiągnięcia najniższej wartości napięcia roboczego V min. Następnie (od t4) należy odczekać po raz kolejny co najmniej 30 sekund do ustabilizowania się ostatecznej wartości napięcia Vc. |
| e) | Natężenie i napięcie (odpowiednio Imeas and Vmeas) rejestruje się w miarę upływu czasu z częstotliwością próbkowania wynoszącą co najmniej 10 Hz. |
| f) | Na podstawie pomiaru ustala się następujące wartości charakterystyczne (ilustracja na rys. 2):
|
Rysunek 2
Przykład krzywej napięcia na potrzeby pomiarów dotyczących jednostki kondensatora poddanej badaniu
| ΔV(t 1) jest różnicą bezwzględną napięć pomiędzy wartością V a a wartością przecięcia aproksymacji liniowej w chwili t 1. |
| ΔV(t 3) jest różnicą bezwzględną napięć pomiędzy wartością V b a wartością przecięcia aproksymacji liniowej w chwili t 3. |
| ΔV(t 2) jest różnicą bezwzględną napięć pomiędzy wartościami V max i V b. |
| ΔV(t 4) jest różnicą bezwzględną napięć pomiędzy wartościami V min i V c. |
6.4. Przetwarzanie końcowe danych pomiarowych dotyczących jednostki kondensatora poddanej badaniu
6.4.1 Obliczanie oporu wewnętrznego i kapacytancji
Do obliczenia wartości oporu wewnętrznego (R) i kapacytancji (C) wykorzystuje się dane pomiarowe otrzymane zgodnie z pkt 6.3, zgodnie z następującymi równaniami:
| a) | Kapacytancję w odniesieniu do ładowania i rozładowania oblicza się w następujący sposób:
|
| b) | Prąd maksymalny w odniesieniu do ładowania i rozładowania oblicza się w następujący sposób:
|
| c) | Opór wewnętrzny w odniesieniu do ładowania i rozładowania oblicza się w następujący sposób:
|
| d) | Na potrzeby modelu wymagane są tylko pojedyncze wartości kapacytancji i oporu. Oblicza się je w następujący sposób:
|
| e) | Napięcie maksymalne określa się jako zarejestrowaną wartość Vb, a napięcie minimalne określa się jako zarejestrowaną wartość Vc zgodnie z pkt 6.3 lit. f). |
"Dodatek 1
WZÓR ŚWIADECTWA DOTYCZĄCEGO CZĘŚCI, ODDZIELNEGO ZESPOŁU TECHNICZNEGO LUB UKŁADU
Maksymalny format: A4 (210 x 297 mm)
ŚWIADECTWO DOTYCZĄCE WŁAŚCIWOŚCI POWIĄZANYCH Z EMISJAMI CO2 I ZUŻYCIEM PALIWA W ODNIESIENIU UKŁADU MASZYNY ELEKTRYCZNEJ / ZINTEGROWANEGO ELEKTRYCZNEGO UKŁADU PRZENIESIENIA NAPĘDU / ZINTEGROWANEGO UKŁADU PRZENIESIENIA NAPĘDU W HYBRYDOWYCH POJAZDACH ELEKTRYCZNYCH TYPU 1 / UKŁADU AKUMULATORÓW / UKŁADU KONDENSATORÓW
Pieczęć urzędowa
Zawiadomienie dotyczące:
| - | udzielenia(1) |
| - | rozszerzenia(1) |
| - | odmowy udzielenia(1) |
| - | cofnięcia(1) |
świadectwa dotyczącego właściwości powiązanych z emisjami CO2 i zużyciem paliwa w odniesieniu układu maszyny elektrycznej / zintegrowanego elektrycznego układu przeniesienia napędu / zintegrowanego układu przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 / układu akumulatorów / układu kondensatorów zgodnie z rozporządzeniem Komisji (UE) 2017/2400.
Rozporządzenie Komisji (UE) 2017/2400 ostatnio zmienione ……………..
Numer certyfikacji:
Skrót:
Powód rozszerzenia:
SEKCJA I
| 0.1. | Marka (nazwa handlowa producenta): |
| 0.2. | Typ: |
| 0.3. | Sposoby identyfikacji typu |
| 0.3.1. | Umiejscowienie znaku certyfikującego: |
| 0.3.2. | Sposób zamocowania znaku certyfikującego: |
| 0.5. | Nazwa i adres producenta: |
| 0.6. | Nazwy i adresy zakładów montażowych: |
| 0.7. | Nazwa i adres przedstawiciela producenta (w stosownych przypadkach) |
SEKCJA II
| 1. | Informacje dodatkowe (w stosownych przypadkach): zob.: addendum |
| 2. | Organ udzielający homologacji odpowiedzialny za przeprowadzenie badań: |
| 3. | Data sprawozdania z badań: |
| 4. | Numer sprawozdania z badań: |
| 5. | Uwagi (w stosownych przypadkach): zob.: addendum |
| 6. | Miejscowość: |
| 7. | Data: |
| 8. | Podpis: |
Załączniki:
Pakiet informacyjny. Sprawozdanie z badań.
"Dodatek 2
Dokument informacyjny dotyczący układu maszyny elektrycznej
| Dokument informacyjny nr: | Wydanie: Data wydania: Data zmiany: |
zgodnie z …
Typ/rodzina układu maszyny elektrycznej (w stosownych przypadkach):
…
| 0. | INFORMACJE OGÓLNE |
| 0.1. | Nazwa i adres producenta |
| 0.2. | Marka (nazwa handlowa producenta): |
| 0.3. | Typ układu maszyny elektrycznej: |
| 0.4. | Rodzina układu maszyny elektrycznej: |
| 0.5. | Typ układu maszyny elektrycznej jako oddzielny zespół techniczny / rodzina układu maszyny elektrycznej jako oddzielny zespół techniczny |
| 0.6. | Nazwa lub nazwy handlowe (o ile występują): |
| 0.7. | Sposób oznakowania modelu, jeżeli oznaczono na układzie maszyny elektrycznej: |
| 0.8. | W przypadku części i oddzielnych zespołów technicznych, umiejscowienie i sposób umieszczenia znaku homologacji WE: |
| 0.9. | Nazwy i adresy zakładów montażowych: |
| 0.10. | Nazwa i adres przedstawiciela producenta: |
CZĘŚĆ 1
PODSTAWOWE WŁAŚCIWOŚCI (MACIERZYSTEGO) UKŁADU MASZYNY ELEKTRYCZNEJ I TYPÓW UKŁADU MASZYNY ELEKTRYCZNEJ NALEŻĄCYCH DO RODZINY UKŁADU MASZYNY ELEKTRYCZNEJ
|
| |Macierzysty układ maszyny elektrycznej | |Członkowie rodziny | ||||
|
| |lub typ układu maszyny elektrycznej | | | ||||
|
| | | | #1 | | #2 | | #3 | | | |
| 1. | Informacje ogólne |
| 1.1. | Wartość lub wartości napięcia probierczego: V |
| 1.2. | Podstawowa prędkość obrotowa silnika: [1/min] |
| 1.3. | Maksymalna prędkość na wale zdawczym silnika: [1/min] |
| 1.4. | (lub domyślnie) prędkość na wałku głównym reduktora/skrzyni biegów: [1/min] |
| 1.5. | Prędkość przy mocy maksymalnej: [1/min] |
| 1.6. | Moc maksymalna: kW |
| 1.7. | Prędkość obrotowa dla maksymalnego momentu obrotowego: [1/min] |
| 1.8. | Maksymalny moment obrotowy: Nm |
| 1.9. | Maksymalna moc 30-minutowa: kW |
| 2. | Maszyna elektryczna |
| 2.1. | Zasada działania |
| 2.1.1. | Prąd stały (DC)/prąd przemienny (AC): |
| 2.1.2. | Liczba faz: |
| 2.1.3. | Samowzbudna / samodzielna / szeregowa / szeregowo-bocznikowa: |
| 2.1.4. | Synchroniczna / asynchroniczna: |
| 2.1.5. | Z wirnikami uzwojonymi / z magnesami stałymi / z obudową: |
| 2.1.6. | Liczba biegunów silnika: |
| 2.2. | Moment bezwładności: kgm2 |
| 3. | Regulator mocy |
| 3.1. | Marka: |
| 3.2. | Typ: |
| 3.3. | Zasada działania: |
| 3.4. | Rodzaj sterowania: wektorowe/w układzie otwartym/w układzie zamkniętym/inne (określić): |
| 3.5. | Maksymalna wartość skuteczna prądu dostarczanego do silnika: A |
| 3.6. | Przez maksymalnie: s |
| 3.7. | Zakres napięcia DC (od/do): V |
| 3.8. | Zgodnie z pkt 4.1 niniejszego załącznika częścią układu maszyny elektrycznej jest przetwornica DC/DC |
| 4. | Układ chłodzenia |
| 4.1. | Silnik (ciecz/powietrze/inne (określić)): |
| 4.2. | Urządzenie sterujące (ciecz/powietrze/inne (określić)): |
| 4.3. | Opis układu: |
| 4.4. | Rysunek lub rysunki koncepcyjne: |
| 4.5. | Wartości graniczne temperatury (min./maks.): K |
| 4.6. | W położeniu odniesienia: |
| 4.7. | Natężenie przepływu (min./maks.): l/min |
| 5. | Udokumentowane wartości z badań części |
| 5.1. | Dane liczbowe dotyczące sprawności na potrzeby oceny zgodności (3): |
| 5.2. | Układ chłodzenia (deklaracja dla każdego obiegu chłodzenia): |
| 5.2.1. | maksymalne natężenie przepływu masowego lub objętościowego chłodziwa lub maksymalne ciśnienie wejściowe chłodziwa: |
| 5.2.2. | maksymalne temperatury chłodziwa: |
| 5.2.3. | maksymalna dostępna moc chłodzenia: |
| 5.2.4. | Zarejestrowane wartości średnie dla każdego przebiegu badawczego |
| 5.2.4.1. | natężenie przepływu objętościowego lub masowego chłodziwa: |
| 5.2.4.2. | temperatura chłodziwa na wejściu do obiegu chłodzenia: |
| 5.2.4.3. | temperatura chłodziwa na wejściu i wyjściu wymiennika ciepła stanowiska badawczego po stronie układu maszyny elektrycznej: |
WYKAZ ZAŁĄCZNIKÓW
| Nr | Opis: | Data wydania: |
| 1 | Informacje dotyczące warunków badani układu maszyny elektrycznej … |
|
| 2 | … |
|
Załącznik 1 do dokumentu informacyjnego dotyczącego układu maszyny elektrycznej
|
| Informacje dotyczące warunków badania (w stosownych przypadkach) |
| 1.1 | … |
"Dodatek 3
Dokument informacyjny dotyczący zintegrowanego elektrycznego układu przeniesienia napędu
| Dokument informacyjny nr: | Wydanie: Data wydania: Data zmiany: |
zgodnie z …
Typ/rodzina zintegrowanego elektrycznego układu przeniesienia napędu (w stosownych przypadkach):
…
| 0. | INFORMACJE OGÓLNE |
| 0.1. | Nazwa i adres producenta |
| 0.2. | Marka (nazwa handlowa producenta): |
| 0.3. | Typ zintegrowanego elektrycznego układu przeniesienia napędu: |
| 0.4. | Rodzina zintegrowanego elektrycznego układu przeniesienia napędu: |
| 0.5. | Typ zintegrowanego elektrycznego układu przeniesienia napędu jako oddzielny zespół techniczny / rodzina zintegrowanego elektrycznego układu przeniesienia napędu jako oddzielny zespół techniczny: |
| 0.6. | Nazwa lub nazwy handlowe (o ile występują): |
| 0.7. | Sposób oznakowania modelu, jeżeli oznaczono na zintegrowanym elektrycznym układzie przeniesienia napędu: |
| 0.8. | W przypadku części i oddzielnych zespołów technicznych, umiejscowienie i sposób umieszczenia znaku homologacji WE: |
| 0.9. | Nazwy i adresy zakładów montażowych: |
| 0.10. | Nazwa i adres przedstawiciela producenta: |
CZĘŚĆ 1
PODSTAWOWE WŁAŚCIWOŚCI (MACIERZYSTEJ) ZINTEGROWANEGO ELEKTRYCZNEGO UKŁADU PRZENIESIENIA NAPĘDU I TYPÓW ZINTEGROWANEGO ELEKTRYCZNEGO UKŁADU PRZENIESIENIA NAPĘDU NALEŻĄCYCH DO RODZINY ZINTEGROWANEGO ELEKTRYCZNEGO UKŁADU PRZENIESIENIA NAPĘDU
|
| |Macierzysty zintegrowany elektryczny układ przeniesienia napędu | |Członkowie rodziny | ||||
|
| |lub typ zintegrowanego elektrycznego układu przeniesienia napędu | | | ||||
|
| | | | #1 | | #2 | | #3 | | | |
| 1. | Informacje ogólne |
| 1.1. | Wartość lub wartości napięcia probierczego: V |
| 1.2. | Podstawowa prędkość obrotowa silnika: [1/min] |
| 1.3. | Maksymalna prędkość na wale zdawczym silnika: [1/min] |
| 1.4. | (lub domyślnie) prędkość na wałku głównym reduktora/skrzyni biegów: [1/min] |
| 1.5. | Prędkość przy mocy maksymalnej: [1/min] |
| 1.6. | Moc maksymalna: kW |
| 1.7. | Prędkość obrotowa dla maksymalnego momentu obrotowego: [1/min] |
| 1.8. | Maksymalny moment obrotowy: Nm |
| 1.9. | Maksymalna moc 30-minutowa: kW |
| 1.10. | Liczba maszyn elektrycznych: |
| 2. | Maszyna elektryczna (dla każdej maszyny elektrycznej): |
| 2.1. | Identyfikator maszyny elektrycznej: |
| 2.2. | Zasada działania |
| 2.2.1. | Prąd stały (DC)/prąd przemienny (AC): |
| 2.2.2. | Liczba faz: |
| 2.2.3. | Samowzbudna / samodzielna / szeregowa / szeregowo-bocznikowa: |
| 2.2.4. | Synchroniczna / asynchroniczna: |
| 2.2.5. | Z wirnikami uzwojonymi / z magnesami stałymi / z obudową: |
| 2.2.6. | Liczba biegunów silnika: |
| 2.3. | Moment bezwładności: kgm2 |
| 3. | Regulator mocy (dla każdego regulatora mocy): |
| 3.1. | Odpowiedni identyfikator maszyny elektrycznej: |
| 3.2. | Marka: |
| 3.3. | Typ: |
| 3.4. | Zasada działania: |
| 3.5. | Rodzaj sterowania: wektorowe/w układzie otwartym/w układzie zamkniętym/inne (określić): |
| 3.6. | Maksymalna wartość skuteczna prądu dostarczanego do silnika: A |
| 3.7. | Przez maksymalnie: s |
| 3.8. | Zakres napięcia DC (od/do): V |
| 3.9. | Zgodnie z pkt 4.1 niniejszego załącznika częścią układu maszyny elektrycznej jest przetwornica DC/DC |
| 4. | Układ chłodzenia |
| 4.1. | Silnik (ciecz/powietrze/inne (określić)): |
| 4.2. | Urządzenie sterujące (ciecz/powietrze/inne (określić)): |
| 4.3. | Opis układu: |
| 4.4. | Rysunek lub rysunki koncepcyjne: |
| 4.5. | Wartości graniczne temperatury (min./maks.): K |
| 4.6. | W położeniu odniesienia: |
| 4.7. | Natężenie przepływu (min./maks.): g/min lub l/min |
| 5. | Skrzynia biegów |
| 5.1. | Przełożenie, układ biegów i przepływ mocy: |
| 5.2. | Odległość osi w odniesieniu do wału pośredniego przekładni: |
| 5.3. | Typ łożysk w odpowiednich położeniach (jeżeli są zamontowane); |
| 5.4. | Typ elementów przesuwnych (sprzęgła zębate, w tym synchronizatory, lub sprzęgła cierne) w odpowiednich położeniach (jeżeli są zamontowane): |
| 5.5. | Całkowita liczba biegów do jazdy do przodu |
| 5.6. | Liczba sprzęgieł przesuwnych zębatych: |
| 5.7. | Liczba synchronizatorów: |
| 5.8. | Liczba tarcz sprzęgieł ciernych (z wyjątkiem pojedynczego sprzęgła suchego z 1 tarczą lub 2 tarczami): |
| 5.9. | Średnica zewnętrzna tarcz sprzęgieł ciernych (z wyjątkiem pojedynczego sprzęgła suchego z 1 tarczą lub 2 tarczami): |
| 5.10. | Chropowatość powierzchni zębów (z uwzględnieniem rysunków): |
| 5.11. | Liczba uszczelnień dynamicznych wału: |
| 5.12. | Przepływ oleju smarującego i chłodzącego na jeden obrót wału wejściowego przekładni |
| 5.13. | Lepkość oleju w temperaturze 100 °C (± 10 %): |
| 5.14. | Ciśnienie w układzie w przypadku hydraulicznie sterowanych skrzyń biegów: |
| 5.15. | Określony poziom oleju w odniesieniu do osi centralnej i zgodny z rysunkiem przedstawiającym specyfikacje (na podstawie średniej wartości między dolną a górną granicą tolerancji) w warunkach statycznych lub w warunkach pracy. Poziom oleju uznaje się za równy, jeżeli wszystkie obracające się części przekładni (z wyjątkiem pompy olejowej i napędu przekładni) znajdują się powyżej określonego poziomu oleju: |
| 5.16. | Określony poziom oleju (± 1 mm): |
| 5.17. | Przełożenia [-] i maksymalny wejściowy moment obrotowy [Nm], maksymalna moc wejściowa (kW) i maksymalna prędkość wejściowa [obr./min] (dla każdego biegu do jazdy do przodu): |
| 6. | Mechanizm różnicowy |
| 6.1. | Przełożenie: |
| 6.2. | Koncepcyjne specyfikacje techniczne: |
| 6.3. | Rysunki koncepcyjne: |
| 6.4. | Objętość oleju: |
| 6.5. | Poziom oleju: |
| 6.6. | Specyfikacja oleju: |
| 6.7. | Typ łożyska (typ, liczba, średnica wewnętrzna, średnica zewnętrzna, szerokość oraz rysunek): |
| 6.8. | Typ uszczelnienia (główna średnica, liczba uszczelek): |
| 6.9. | Koła (rysunek): |
| 6.9.1. | Typ łożyska (typ, liczba, średnica wewnętrzna, średnica zewnętrzna, szerokość oraz rysunek): |
| 6.9.2. | Typ uszczelnienia (główna średnica, liczba uszczelek): |
| 6.9.3. | Typ smaru: |
| 6.10. | Liczba przekładni obiegowych/czołowych w przypadku mechanizmu różnicowego: |
| 6.11. | Najmniejsza szerokość przekładni obiegowych/czołowych w przypadku mechanizmu różnicowego: |
| 7. | Udokumentowane wartości z badań części |
| 7.1. | Dane liczbowe dotyczące sprawności na potrzeby oceny zgodności (*): |
| 7.2. | Układ chłodzenia (deklaracja dla każdego obiegu chłodzenia): |
| 7.2.1. | maksymalne natężenie przepływu masowego lub objętościowego chłodziwa lub maksymalne ciśnienie wejściowe chłodziwa: |
| 7.2.2. | maksymalne temperatury chłodziwa: |
| 7.2.3. | maksymalna dostępna moc chłodzenia: |
| 7.2.4. | Zarejestrowane wartości średnie dla każdego przebiegu badawczego |
| 7.2.4.1. | natężenie przepływu objętościowego lub masowego chłodziwa: |
| 7.2.4.2. | temperatura chłodziwa na wejściu do obiegu chłodzenia: |
| 7.2.4.3. | temperatura chłodziwa na wejściu i wyjściu wymiennika ciepła stanowiska badawczego po stronie zintegrowanego elektrycznego układu przeniesienia napędu: |
WYKAZ ZAŁĄCZNIKÓW
| Nr | Opis: | Data wydania: |
| 1 | Informacje dotyczące warunków badania układu maszyny elektrycznej … |
|
| 2 | … |
|
Załącznik 1 do dokumentu informacyjnego dotyczącego zintegrowanego elektrycznego układu przeniesienia napędu
| 8. | Informacje dotyczące warunków badania (w stosownych przypadkach) |
| 8.1. | Maksymalna badana prędkość wejściowa [obr./min] |
| 8.2. | Maksymalny badany wejściowy moment obrotowy [Nm] |
"Dodatek 4
Dokument informacyjny dotyczący zintegrowanego układu przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1
W przypadku zintegrowanego układu przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 dokument informacyjny składa się z mających zastosowanie części dokumentu informacyjnego dotyczącego układów maszyny elektrycznej zgodnie z dodatkiem 2 do niniejszego załącznika oraz z dokumentu informacyjnego dotyczącego przekładni zgodnie z dodatkiem 2 do załącznika VI.
"Dodatek 5
Dokument informacyjny dotyczący układu akumulatorów lub typu reprezentatywnych podukładów akumulatorów
| Dokument informacyjny nr: | Wydanie: Data wydania: Data zmiany: |
zgodnie z …
Układ akumulatorów lub typ reprezentatywnych podukładów akumulatorów:
…
| 0. | INFORMACJE OGÓLNE |
| 0.1. | Nazwa i adres producenta |
| 0.2. | Marka (nazwa handlowa producenta): |
| 0.3. | Typ układu akumulatorów: |
| 0.4. | - |
| 0.5. | Typ układu akumulatorów jako oddzielnego zespołu technicznego |
| 0.6. | Nazwa lub nazwy handlowe (o ile występują): |
| 0.7. | Sposób oznakowania modelu, jeżeli oznaczono na układzie akumulatorów: |
| 0.8. | W przypadku części i oddzielnych zespołów technicznych, umiejscowienie i sposób umieszczenia znaku homologacji WE: |
| 0.9. | Nazwy i adresy zakładów montażowych: |
| 0.10. | Nazwa i adres przedstawiciela producenta: |
CZĘŚĆ 1
PODSTAWOWE WŁAŚCIWOŚCI UKŁADU AKUMULATORÓW LUB TYPU REPREZENTATYWNYCH PODUKŁADÓW AKUMULATORÓW
Typ (pod)układu akumulatorów
| 1. | Informacje ogólne |
| 1.1. | Kompletny układ lub reprezentatywny podukład: |
| 1.2. | Układ akumulatorów o dużej gęstości mocy (HPBS) / układ akumulatorów o dużej gęstości energii (HEBS): |
| 1.3. | Koncepcyjne specyfikacje techniczne: |
| 1.4. | Technologia chemiczna ogniw: |
| 1.5. | Liczba ogniw połączonych szeregowo: |
| 1.6. | Liczba ogniw połączonych równolegle: |
| 1.7. | Reprezentatywna skrzynka przyłączeniowa z bezpiecznikami i wyłącznikami dołączona do badanego układu (tak/nie): |
| 1.8. | Reprezentatywne złącza szeregowe dołączone do badanego układu (tak/nie): |
| 2. | Układ kondycjonowania |
| 2.1. | Ciecz/powietrze/inne (określić): |
| 2.2. | Opis układu: |
| 2.3. | Rysunek lub rysunki koncepcyjne: |
| 2.4. | Wartości graniczne temperatury (min./maks.): K |
| 2.5. | W położeniu odniesienia: |
| 2.6. | Natężenie przepływu (min./maks.): l/min |
| 3. | Udokumentowane wartości z badań części |
| 3.1. | Całkowita sprawność energetyczna na potrzeby oceny zgodności (**): |
| 3.2. | Maksymalny prąd rozładowania na potrzeby oceny zgodności: |
| 3.3. | Maksymalny prąd ładowania na potrzeby oceny zgodności: |
| 3.4. | Temperatura badania (zadeklarowana docelowa temperatura robocza): |
| 3.5. | Układ kondycjonowania (wskazać dla każdego przeprowadzonego przebiegu badawczego) |
| 3.5.1. | Wymagane chłodzenie lub ogrzewanie: |
| 3.5.2. | Maksymalna dostępna moc chłodzenia lub ogrzewania: |
WYKAZ ZAŁĄCZNIKÓW
| Nr | Opis: | Data wydania: |
| 1 | Informacje dotyczące warunków badania układu akumulatorów … |
|
| 2 | … |
|
Załącznik 1 do dokumentu informacyjnego dotyczącego układu akumulatorów
|
| Informacje dotyczące warunków badania (w stosownych przypadkach) |
| 1.1 | … |
"Dodatek 6
Dokument informacyjny dotyczący układu kondensatorów lub typu reprezentatywnych podukładów kondensatorów
| Dokument informacyjny nr: | Wydanie: Data wydania: Data zmiany: |
zgodnie z …
Układ kondensatorów lub typ reprezentatywnych podukładów kondensatorów:
…
| 0. | INFORMACJE OGÓLNE |
| 0.1. | Nazwa i adres producenta |
| 0.2. | Marka (nazwa handlowa producenta): |
| 0.3. | Typ układu kondensatorów: |
| 0.4. | Rodzina układu kondensatorów: |
| 0.5. | Typ układu kondensatorów jako oddzielny zespół techniczny / rodzina układu kondensatorów jako oddzielny zespół techniczny |
| 0.6. | Nazwa lub nazwy handlowe (o ile występują): |
| 0.7. | Sposób oznakowania modelu, jeżeli oznaczono na układzie kondensatorów |
| 0.8. | W przypadku części i oddzielnych zespołów technicznych, umiejscowienie i sposób umieszczenia znaku homologacji WE: |
| 0.9. | Nazwy i adresy zakładów montażowych: |
| 0.10. | Nazwa i adres przedstawiciela producenta: |
CZĘŚĆ 1
PODSTAWOWE WŁAŚCIWOŚCI UKŁADU KONDENSATORÓW LUB TYPU REPREZENTATYWNYCH PODUKŁADÓW KONDENSATORÓW
Typ (pod)układu kondensatorów
| 1. | Informacje ogólne |
| 1.1. | Kompletny układ lub reprezentatywny podukład: |
| 1.2. | Koncepcyjne specyfikacje techniczne: |
| 1.3. | Technologia i specyfikacje ogniwa: |
| 1.4. | Liczba ogniw połączonych szeregowo: |
| 1.5. | Liczba ogniw połączonych równolegle: |
| 1.6. | Reprezentatywna skrzynka przyłączeniowa z bezpiecznikami i wyłącznikami dołączona do badanego układu (tak/nie): |
| 1.7. | Reprezentatywne złącza szeregowe dołączone do badanego układu (tak/nie): |
| 2. | Układ kondycjonowania |
| 2.1. | Ciecz/powietrze/inne (określić): |
| 2.2. | Opis układu: |
| 2.3. | Rysunek lub rysunki koncepcyjne: |
| 2.4. | Wartości graniczne temperatury (min./maks.): K |
| 2.5. | W położeniu odniesienia: |
| 2.6. | Natężenie przepływu (min./maks.): l/min |
| 3. | Udokumentowane wartości z badań części |
| 3.1. | Temperatura badania (zadeklarowana docelowa temperatura robocza): |
| 3.2. | Układ kondycjonowania (wskazać dla każdego przeprowadzonego przebiegu badawczego) |
| 3.2.1. | Wymagane chłodzenie lub ogrzewanie: |
| 3.2.2. | Maksymalna dostępna moc chłodzenia lub ogrzewania: |
WYKAZ ZAŁĄCZNIKÓW
| Nr | Opis: | Data wydania: |
| 1 | Informacje dotyczące warunków badania układu kondensatorów … |
|
| 2 | … |
|
Załącznik 1 do dokumentu informacyjnego dotyczącego układu kondensatorów
|
| Informacje dotyczące warunków badania (w stosownych przypadkach) |
| 1.1 | … |
"Dodatek 7
(zastrzeżone)
"Dodatek 8
Wartości standardowe dla układu maszyny elektrycznej
Dane wejściowe dotyczące układu maszyny elektrycznej generuje się w oparciu o wartości standardowe w następujących etapach:
| - | Etap 1: W odniesieniu do niniejszego dodatku stosuje się regulamin ONZ nr 85, o ile nie wskazano inaczej. |
| - | Etap 2: Wartości maksymalne momentu obrotowego jako funkcję prędkości obrotowej ustala się na podstawie danych wygenerowanych zgodnie z pkt 5.3.1.4 regulaminu ONZ nr 85. Dane rozszerza się zgodnie z pkt 4.3.2 niniejszego załącznika. |
| - | Etap 3: Wartości minimalne momentu obrotowego jako funkcję prędkości obrotowej ustala się poprzez przemnożenie wartości momentu obrotowego z etapu 2 powyżej przez minus jeden. |
| - | Etap 4: Maksymalny ciągły 30-minutowy moment obrotowy i odpowiednią prędkość obrotową ustala się na podstawie danych wygenerowanych zgodnie z pkt 5.3.2.3 regulaminu ONZ nr 85 jako wartości średnie w okresie 30 minut. Jeżeli nie można ustalić wartości maksymalnego stałego 30-minutowy momentu obrotowego zgodnie z regulaminem nr 85 lub ustalona wartość wynosi 0 Nm, mające zastosowanie dane wejściowe ustawia się na 0 Nm, a odpowiednią prędkość obrotową ustawia się na prędkość znamionową określoną na podstawie danych wygenerowanych zgodnie z etapem 2 powyżej. |
| - | Etap 5: Charakterystykę przeciążenia określa się na podstawie danych wygenerowanych zgodnie z etapem 2 powyżej. Przeciążeniowy moment obrotowy i odpowiednią prędkość obrotową oblicza się jako wartości średnie w całym zakresie prędkości przy mocy równej co najmniej 90 % mocy maksymalnej. Czas trwania przeciążenia t0_maxP jest określony jako cały czas trwania przebiegu badawczego przeprowadzonego zgodnie z etapem 2 powyżej pomnożony przez współczynnik 0,25. |
| - | Etap 6: Mapę zużycia mocy elektrycznej określa się zgodnie z następującymi przepisami:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||





| - | Etap 7: Krzywą oporu oblicza się na podstawie rzeczywistej mapy strat mocy określonej zgodnie z lit. e) powyżej, zgodnie z następującymi przepisami:
|


| - | Etap 8: Moment bezwładności określa się z wykorzystaniem jednego z następujących wariantów:
|
"Dodatek 9
Wartości standardowe dla zintegrowanego elektrycznego układu przeniesienia napędu
W celu umożliwienia stosowania przepisów określonych w niniejszym dodatku do generowania danych wejściowych dla zintegrowanego elektrycznego układu przeniesienia napędu opartych całkowicie lub częściowo na wartościach standardowych, spełnione być muszą następujące warunki.
Jeżeli zintegrowany elektryczny układ przeniesienia napędu zawiera więcej niż jeden układ maszyny elektrycznej, wszystkie maszyny elektryczne muszą mieć takie same specyfikacje. Jeżeli zintegrowany elektryczny układ przeniesienia napędu zawiera więcej niż jeden układ maszyny elektrycznej, wszystkie maszyny elektryczne muszą być podłączone do ścieżki momentu obrotowego układu IEPC w tym samym położeniu odniesienia (tj. przed skrzynią biegów albo za skrzynią biegów), przy czym wszystkie maszyny elektryczne muszą pracować w tym położeniu odniesienia z tą samą prędkością obrotową, a ich indywidualne momenty obrotowe (moc) dodaje się w ramach sumującej skrzyni biegów dowolnego rodzaju.
| (1) | W celu wygenerowania dla zintegrowanego elektrycznego układu przeniesienia napędu danych wejściowych opartych w całości lub w części na wartościach standardowych stosuje się jeden z poniższych wariantów:
|
| (2) | Układ IEPC z wewnętrzną skrzynią biegów Stratę momentu obrotowego Tgbx,l ,in dla każdego przełączalnego biegu do jazdy do przodu związanego z wałem wejściowym części skrzyni biegów należących do układu IEPC oblicza się zgodnie z następującymi przepisami:
|
| (3) | Układ IEPC z wewnętrznym mechanizmem różnicowym Stratę momentu obrotowego Tdiff,l ,in związaną z wejściem części mechanizmu różnicowego należących do układu IEPC oblicza się zgodnie z następującymi przepisami:
|
"Dodatek 10
Wartości standardowe dla układu magazynowania energii wielokrotnego ładowania (REESS)
| (1) | Układ akumulatorów lub reprezentatywny podukład akumulatorów: Dane wejściowe dotyczące układu akumulatorów lub reprezentatywnego podukładu akumulatorów generuje się w oparciu o wartości standardowe w następujących etapach:
|
| (2) | Układ kondensatorów lub reprezentatywny podukład kondensatorów Dane wejściowe dotyczące układu kondensatorów lub reprezentatywnego podukładu kondensatorów generuje się w oparciu o wartości standardowe w następujących etapach:
|

"Dodatek 11
(zastrzeżone)
"Dodatek 12
Ocena zgodności certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa
1. Układy maszyny elektrycznej lub układy IEPC
| 1.1 | Każdy układ maszyny elektrycznej lub układ IEPC musi być wykonane w taki sposób, aby był zgodny z homologowanym typem pod względem opisu znajdującego się w świadectwie homologacji i jego załącznikach. Procedury dotyczące zgodności certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa muszą być zgodne z procedurami określonymi w art. 31 rozporządzenia (UE) 2018/858. |
| 1.2 | Zgodność certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa sprawdza się w oparciu o opis zawarty w świadectwach homologacji i załączonych do nich pakietach informacyjnych, jak określono w dodatku 2 i 3 do niniejszego załącznika. |
| 1.3 | Zgodność certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa ocenia się zgodnie ze specyficznymi warunkami określonymi w niniejszym punkcie. |
| 1.4 | Producent części co roku bada przynajmniej liczbę jednostek wskazaną w tabeli 1 na podstawie wielkości produkcji rocznej układów maszyny elektrycznej lub układów IEPC produkowanych przez producenta. W celu ustalenia wielkości produkcji rocznej uwzględnia się wyłącznie układy maszyny elektrycznej lub układy IEPC, które spełniają wymagania niniejszego rozporządzenia i dla których nie zastosowano wartości standardowych. |
| 1.5 | W odniesieniu do całkowitej wielkości produkcji rocznej wynoszącej do 4,000, wybór rodziny, w odniesieniu do której przeprowadzone zostanie badanie, jest uzgadniany między producentem części a organem udzielającym homologacji. |
| 1.6 | W odniesieniu do całkowitej wielkości produkcji rocznej wynoszącej powyżej 4,000, rodzina o największej wielkości produkcji jest zawsze poddawana badaniu. Producent części dostarcza organowi udzielającemu homologacji uzasadnienie dotyczące liczby przeprowadzonych badań oraz wyboru rodziny. Pozostałe rodziny, w odniesieniu do których przeprowadzone zostaną badania, są uzgadniane między producentem a organem udzielającym homologacji. Tabela 1 Badanie zgodności wielkości próby
|
| 1.7. | Do celów zgodności badania certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa organ udzielający homologacji wraz z producentem części określa typ (typy) układu maszyny elektrycznej lub układu IEPC, które należy poddać badaniom. Organ udzielający homologacji zapewnia, aby wybrany typ układu maszyny elektrycznej lub układu IEPC wyprodukowano zgodnie z tymi samymi normami, które są stosowane w przypadku produkcji seryjnej. |
| 1.8 | Jeżeli wynik badania przeprowadzonego zgodnie z pkt 1.9 jest większy niż wynik określony w pkt 1.9.4, należy przeprowadzić badania 3 dodatkowych jednostek z tej samej rodziny. Jeżeli którekolwiek z nich da wynik negatywny, zastosowanie mają przepisy art. 23. |
| 1.9 | Badanie zgodności produkcji dotyczące układu maszyny elektrycznej lub układu IEPC |
| 1.9.1 | Warunki brzegowe Stosuje się wszystkie warunki brzegowe określone w niniejszym załączniku na potrzeby badania certyfikacyjnego, o ile niniejszy punkt nie stanowi inaczej. Moc chłodzenia powinna mieścić się w granicach określonych w niniejszym załączniku na potrzeby badania certyfikacyjnego. Pomiaru dokonuje się wyłącznie dla jednego z poziomów napięcia określonych w pkt 4.1.3 niniejszego załącznika. Poziom napięcia do badań wybiera producent części. Specyfikacje urządzeń pomiarowych określone zgodnie z pkt 3.1 niniejszego załącznika nie muszą być spełnione w przypadku oceny zgodności. |
| 1.9.2 | Przebieg badawczy Należy zmierzyć dwie różne wartości docelowe. Po zakończeniu pomiaru przy pierwszej wartości docelowej układ można schłodzić zgodnie z zaleceniami producenta części przez pracę przy konkretnej wartości docelowej określonej przez producenta części. W przypadku wartości docelowej 1 badanie charakterystyki przeciążenia wykonuje się zgodnie z pkt 4.2.5 niniejszego załącznika. W przypadku wartości docelowej 2 badanie maksymalnego stałego 30-minutowego momentu obrotowego przeprowadza się zgodnie z pkt 4.2.4 niniejszego załącznika. |
| 1.9.3 | Przetwarzanie końcowe wyników Wszystkie wartości mocy mechanicznej i elektrycznej określone zgodnie z pkt 4.2.5.3 i 4.2.4.3 koryguje się o odchylenie niepewności urządzeń pomiarowych wykorzystywanych podczas oceny zgodności zgodnie z poniższymi przepisami:
|


| 1.9.4 | Ocena wyników Na podstawie wartości dla każdej z dwóch różnych wartości docelowych określonych zgodnie z pkt 1.9.2 i 1.9.3 wyznacza się dane liczbowe dotyczące sprawności, dzieląc skorygowaną moc mechaniczną P* mech przez skorygowaną moc elektryczną P* el. Całkowitą sprawność podczas badania zgodności certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa ηA,CoP oblicza się ze średniej arytmetycznej sprawności dwóch danych liczbowych dotyczących sprawności. Zgodność badania certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa uważa się za pozytywną, jeżeli różnica między ηA,CoP i ηA,TA jest mniejsza niż 3 % sprawności homologowanej dla danego typu ηA,TA. W przypadku układu IEPC ze skrzynią biegów albo mechanizmem różnicowym limit dla uznania wyniku badania zgodności za pozytywny podnosi się do 4 % zamiast 3. W przypadku układu IEPC zarówno ze skrzynią biegów, jak i z mechanizmem różnicowym limit dla uznania wyniku badania zgodności za pozytywny podnosi się do 5 % zamiast 3. Sprawność homologowaną dla danego typu ηA,TA oblicza się jako średnią arytmetyczną dwóch danych liczbowych dotyczących sprawności określonych zgodnie z pkt 4.3.5 i 4.3.6 i udokumentowanych w dokumencie informacyjnym podczas certyfikacji części. |
2. Zintegrowany układ przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1
| 2.1 | Każdy zintegrowany układ przeniesienia napędu w hybrydowych pojazdach elektrycznych musi być wykonany w taki sposób, aby był zgodny z homologowanym typem pod względem opisu znajdującego się w świadectwie homologacji i jego załącznikach. Procedury dotyczące zgodności certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa muszą być zgodne z procedurami określonymi w art. 31 rozporządzenia (UE) 2018/858. |
| 2.2 | Zgodność certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa sprawdza się w oparciu o opis zawarty w świadectwach homologacji i załączonych do nich pakietach informacyjnych, jak określono w dodatku 4 do niniejszego załącznika. |
| 2.3 | Zgodność certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa jest oceniana zgodnie ze specyficznymi warunkami określonymi w pkt 1 niniejszego dodatku, gdzie stosuje się przepisy określone dla układu IEPC w odpowiednich punktach, chyba że postanowiono inaczej. |
| 2.4 | Niezależnie od przepisów pkt 2.3 niniejszego dodatku stosuje się następujące przepisy:
|
3. Układy akumulatorów lub reprezentatywne podukłady akumulatorów
| 3.1 | Każdy układ akumulatorów lub reprezentatywny podukład akumulatorów musi być wykonany w taki sposób, aby był zgodny z homologowanym typem pod względem opisu znajdującego się w świadectwie homologacji i jego załącznikach. Procedury dotyczące zgodności certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa muszą być zgodne z procedurami określonymi w art. 31 rozporządzenia (UE) 2018/858. |
| 3.2 | Zgodność certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa sprawdza się w oparciu o opis zawarty w świadectwach homologacji i załączonych do nich pakietach informacyjnych, jak określono w dodatku 5 do niniejszego załącznika. |
| 3.3 | Zgodność certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa ocenia się zgodnie ze specyficznymi warunkami określonymi w niniejszym punkcie. |
| 3.4 | Producent części co roku bada przynajmniej liczbę jednostek wskazaną w tabeli 2 na podstawie wielkości produkcji rocznej układów akumulatorów lub reprezentatywnych podukładów akumulatorów produkowanych przez producenta części. W celu ustalenia wielkości produkcji rocznej uwzględnia się wyłącznie układy akumulatorów lub reprezentatywne podukłady akumulatorów, które spełniają wymagania niniejszego rozporządzenia i dla których nie zastosowano wartości standardowych. Tabela 2 Badanie zgodności wielkości próby
|
| 3.5. | Do celów zgodności badania certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa organ udzielający homologacji wraz z producentem części określa typ (typy) układu akumulatorów lub reprezentatywnego podukładu akumulatorów, które należy poddać badaniom. Organ udzielający homologacji zapewnia, aby wybrany typ układu akumulatorów lub reprezentatywnego podukładu akumulatorów wyprodukowano zgodnie z tymi samymi normami, które są stosowane w przypadku produkcji seryjnej. |
| 3.6 | Jeżeli wynik badania przeprowadzonego zgodnie z pkt 3.7 jest większy niż wynik określony w pkt 3.7.4, należy przeprowadzić badania 3 dodatkowych jednostek tego samego typu. Jeżeli którekolwiek z nich da wynik negatywny, zastosowanie mają przepisy art. 23. |
| 3.7 | Badanie zgodności produkcji układu akumulatorów lub reprezentatywnego podukładu akumulatorów |
| 3.7.1 | Warunki brzegowe Stosuje się wszystkie warunki brzegowe określone w niniejszym załączniku na potrzeby badania certyfikacyjnego. |
| 3.7.2 | Przebieg badawczy Wykonuje się dwa różne badania. W przypadku badania 1 procedurę badania pojemności znamionowej przeprowadza się zgodnie z pkt 5.4.1 niniejszego załącznika. W przypadku badania 2 wykonuje się następującą procedurę:
|
| 3.7.3 | Przetwarzanie końcowe wyników W przypadku HPBS prąd rozładowania przy 80 % poziomie naładowania i prąd ładowania przy 20 % poziomie naładowania są uśredniane w okresie pomiaru wynoszącym 20 sekund. W przypadku HEBS prąd rozładowania przy 90 % poziomie naładowania i prąd ładowania przy 20 % poziomie naładowania są uśredniane w okresie pomiaru wynoszącym 120 sekund. Dla obu wartości średnich, prądu rozładowania i ładowania, stosuje się liczby bezwzględne. |
| 3.7.4 | Ocena wyników Zgodność badania certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa uważa się za pozytywną, jeżeli spełnione zostały wszystkie poniższe kryteria:
|
4. Układy kondensatorów
| 4.1 | Każdy układ kondensatorów musi być wykonany w taki sposób, aby był zgodny z homologowanym typem pod względem opisu znajdującego się w świadectwie homologacji i jego załącznikach. Procedury dotyczące zgodności certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa muszą być zgodne z procedurami określonymi w art. 31 rozporządzenia (UE) 2018/858. |
| 4.2 | Zgodność certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa sprawdza się w oparciu o opis zawarty w świadectwach homologacji i załączonych do nich pakietach informacyjnych, jak określono w dodatku 6 do niniejszego załącznika. |
| 4.3 | Zgodność certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa ocenia się zgodnie ze specyficznymi warunkami określonymi w niniejszym punkcie. |
| 4.4 | Producent części co roku bada przynajmniej liczbę jednostek wskazaną w tabeli 3 na podstawie wielkości produkcji rocznej układów kondensatorów produkowanych przez producenta części. W celu ustalenia wielkości produkcji rocznej uwzględnia się wyłącznie układy kondensatorów, które spełniają wymagania niniejszego rozporządzenia i dla których nie zastosowano wartości standardowych. Tabela 3 Badanie zgodności wielkości próby
|
| 4.5. | Do celów zgodności badania certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa organ udzielający homologacji wraz z producentem części określa typ (typy) układu kondensatorów, które należy poddać badaniom. Organ udzielający homologacji zapewnia, aby wybrany typ układu kondensatorów wyprodukowano zgodnie z tymi samymi normami, które są stosowane w przypadku produkcji seryjnej. |
| 4.6 | Jeżeli wynik badania przeprowadzonego zgodnie z pkt 4.7 jest większy niż wynik określony w pkt 4.7.4, należy przeprowadzić badania 3 dodatkowych jednostek tego samego typu. Jeżeli którekolwiek z nich da wynik negatywny, zastosowanie mają przepisy art. 23. |
| 4.7 | Badanie zgodności produkcji układów kondensatorów |
| 4.7.1 | Warunki brzegowe Stosuje się wszystkie warunki brzegowe określone w niniejszym załączniku na potrzeby badania certyfikacyjnego. |
| 4.7.2 | Przebieg badawczy Procedurę badania przeprowadza się zgodnie z pkt 6.3 niniejszego załącznika. |
| 4.7.3 | Przetwarzanie końcowe wyników Przetwarzanie końcowe wyników przeprowadza się zgodnie z pkt 6.4 niniejszego załącznika. |
| 4.7.4 | Ocena wyników Zgodność badania certyfikowanych właściwości powiązanych z emisjami CO2 i zużyciem paliwa uważa się za pozytywną, jeżeli spełnione zostały wszystkie poniższe kryteria:
|
"Dodatek 13
Pojęcie rodziny
1. Układy maszyny elektrycznej i układy IEPC
1.1. Informacje ogólne
Rodzinę układów maszyn elektrycznych lub układów IEPC charakteryzują konstrukcja i parametry eksploatacyjne. Parametry te muszą być wspólne dla wszystkich członków danej rodziny. Producent części może określić, które układy maszyny elektrycznej lub układy IEPC należą do jednej rodziny, pod warunkiem że spełnione są kryteria dotyczące przynależności wyszczególnione w niniejszym dodatku. Powiązaną rodzinę zatwierdza organ udzielający homologacji. Producent części przedstawia organowi udzielającemu homologacji odpowiednie informacje dotyczące członków danej rodziny.
1.2. Przypadki szczególne
W niektórych przypadkach może występować interakcja między parametrami. Fakt ten należy uwzględnić w celu zagwarantowania, aby w skład tej samej rodziny wchodziły układy maszyny elektrycznej lub układy IEPC o podobnych właściwościach. Producent części identyfikuje takie przypadki i zgłasza je organowi udzielającemu homologacji. Sytuację taką uwzględnia się jako kryterium dla utworzenia nowej rodziny układów maszyny elektrycznej lub układów IEPC.
Jeżeli pewne urządzenia lub elementy niewymienione w pkt 1.4 mają znaczny wpływ na poziom osiągów lub zużycie mocy elektrycznej, producent części określa je na podstawie dobrej praktyki inżynieryjnej i powiadamia o tym organ udzielający homologacji. Sytuację taką uwzględnia się jako kryterium dla utworzenia nowej rodziny układów maszyny elektrycznej lub układów IEPC.
1.3. Pojęcie rodziny
Pojęcie rodziny określa kryteria i parametry umożliwiające producentowi części grupowanie układów maszyny elektrycznej lub układów IEPC w rodziny o podobnych lub takich samych danych dotyczących emisji CO2 lub zużycia energii.
1.4. Przepisy szczególne dotyczące reprezentatywności
Organ udzielający homologacji może uznać, że parametry eksploatacyjne i zużycie mocy elektrycznej rodziny układów maszyny elektrycznej lub układów IEPC można najlepiej scharakteryzować za pomocą dodatkowych badań. W takim przypadku producent części przekazuje stosowne informacje, aby określić układ maszyny elektrycznej lub układ IEPC w obrębie rodziny, który może najlepiej reprezentować daną rodzinę. Na podstawie tych informacji organ udzielający homologacji może również stwierdzić, że producent części musi stworzyć nową rodzinę układów maszyny elektrycznej lub układów IEPC, składającą się z mniejszej liczby członków, aby była bardziej reprezentatywna.
Jeżeli członkowie należący do rodziny posiadają inne cechy, które można uznać za wpływające na parametry eksploatacyjne lub zużycie mocy elektrycznej, cechy te należy określić i wziąć pod uwagę przy wyborze zespołu macierzystego.
1.5. Parametry określające rodzinę układów maszyny elektrycznej lub układów IEPC
Oprócz parametrów wymienionych poniżej producent części może wprowadzić dodatkowe kryteria pozwalające na określenie rodzin o węższym zakresie. Parametry te nie muszą być parametrami mającymi wpływ na poziom osiągów lub zużycia mocy elektrycznej.
| 1.5.1. | Następujące kryteria są zasadniczo takie same dla wszystkich członków rodziny układów maszyny elektrycznej lub układów IEPC:
Zmiany części wymienionych w lit. a)-f) są dopuszczalne jedynie pod warunkiem, że można przedstawić solidne uzasadnienie inżynieryjne w celu wykazania, że dana zmiana nie ma negatywnego wpływu na parametry eksploatacyjne lub zużycie mocy elektrycznej. |
| 1.5.2. | Następujące kryteria są wspólne dla wszystkich członków rodziny układów maszyny elektrycznej lub układów IEPC. Stosowanie szczególnego zakresu wymienionych poniżej parametrów dopuszcza się po zatwierdzeniu przez organ udzielający homologacji:
|
1.6. Wybór układu macierzystego
Układ macierzysty jednej rodziny układów maszyny elektrycznej lub układów IEPC musi być członkiem tej rodziny o najwyższym łącznym maksymalnym momencie obrotowym ustalonym zgodnie z pkt 4.2.2 niniejszego załącznika.
"Dodatek 14
Oznakowania i numeracja
1. Oznakowania
Jeżeli elektryczny mechanizm napędowy jest poddawany homologacji typu zgodnie z niniejszym załącznikiem, na układzie tym umieszcza się:
| 1.1. | nazwę handlową lub znak towarowy producenta; |
| 1.2. | markę i oznaczenie identyfikujące typ, zawarte w informacjach, o których mowa w pkt 0.2 i 0.3 dodatków 2-6 do niniejszego załącznika; |
| 1.3. | znak certyfikujący (w stosownych wypadkach) w postaci prostokąta otaczającego małą literę "e", po której następuje numer określający państwo członkowskie, które przyznało świadectwo:
|
| 1.4. | W pobliżu prostokąta na znaku certyfikującym znajduje się również »podstawowy numer certyfikacji« określony w sekcji 4 numeru homologacji typu, o którym mowa w załączniku IV do rozporządzenia (UE) 2020/683, poprzedzony dwiema cyframi odpowiadającymi kolejnemu numerowi przyporządkowanemu najnowszej zmianie technicznej wprowadzonej do niniejszego rozporządzenia lub poprzedzony znakiem alfabetycznym oznaczającym część, której udzielono certyfikacji: W przypadku niniejszego rozporządzenia tym kolejnym numerem jest 02. W przypadku niniejszego rozporządzenia znakiem alfabetycznym jest ten określony w tabeli 1. Tabela 1
|
| 1.4.1. | Przykład i wymiary znaku certyfikującego  Na podstawie powyższego znaku certyfikującego umieszczonego na elektrycznym mechanizmie napędowym stwierdza się, że dany typ pojazdu uzyskał homologację w Austrii (e12), zgodnie z niniejszym rozporządzeniem. Pierwsze dwie cyfry (02) wskazują numer sekwencji przypisany najnowszej zmianie technicznej wprowadzonej do niniejszego rozporządzenia. Kolejna litera wskazuje, że przedmiotem certyfikacji jest układ maszyny elektrycznej (M). Ostatnie pięć cyfr (00005) to cyfry przypisane danemu układowi maszyny elektrycznej przez organ udzielający homologacji typu jako podstawowy numer certyfikacji. |
| 1.5 | Na wniosek wnioskującego o wydanie świadectwa i po uprzednim uzgodnieniu z organem udzielającym homologacji typu mogą być stosowane inne wielkości typu niż wskazane w pkt 1.4.1. Te inne wielkości czcionki muszą być wyraźnie czytelne. |
| 1.6 | Oznakowania, etykiety, tabliczki lub naklejki muszą utrzymywać się przez cały okres użytkowania elektrycznego mechanizmu napędowego i muszą pozostać wyraźnie czytelne i nieusuwalne. Producent musi zapewnić, aby nie można było usunąć oznakowań, etykiet, tabliczek ani naklejek bez ich zniszczenia lub zatarcia. |
| 1.7 | Znak certyfikujący musi być widoczny po zamontowaniu elektrycznego mechanizmu napędowego w pojeździe i umieszczony na części niezbędnej do zapewnienia jego prawidłowego działania, która w normalnych warunkach nie wymaga wymiany w okresie użytkowania elektrycznego układu przeniesienia napędu. |
2. Numeracja:
| 2.1. | Numer certyfikacji elektrycznego mechanizmu napędowego składa się z następujących elementów: eX*YYYY/YYYY*ZZZZ/ZZZZ*X*00000*00
|
"Dodatek 15
Parametry wejściowe do narzędzia symulacyjnego
Wprowadzenie
W niniejszym dodatku przedstawiono wykaz parametrów, które producent części musi dostarczyć, ponieważ pełnią one funkcje informacji wejściowych wykorzystywanych przez narzędzie symulacyjne. Obowiązujący schemat XML oraz przykładowe dane zostały udostępnione na dedykowanej platformie dystrybucji elektronicznej.
Definicje
| (1) | »numer identyfikacyjny parametru«: niepowtarzalny numer identyfikacyjny stosowany w narzędziu symulacyjnym w odniesieniu do określonego parametru wejściowego lub zbioru danych wejściowych; |
| (2) | »typ«: typ danych parametru
|
| (3) | »jednostka« … jednostka fizyczna danego parametru. |
Zbiór parametrów wejściowych dla układu maszyny elektrycznej
Tabela 1
Parametry wejściowe »Electric machine system/General«
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| Manufacturer | P450 | token | [-] |
|
| Model | P451 | token | [-] |
|
| CertificationNumber | P452 | token | [-] |
|
| Date | P453 | dateTime | [-] | Data i godzina utworzenia skrótu dotyczącego danej części |
| AppVersion | P454 | token | [-] | Parametr wejściowy specyficzny dla producenta odnoszący się do narzędzi wykorzystywanych do oceniania i przetwarzania danych wynikających z pomiarów elementów |
| ElectricMachineType | P455 | string | [-] | Określony zgodnie z pkt 21 ust. 2 niniejszego załącznika. Dopuszczalne wartości: »ASM«, »ESM«, »PSM«, »RM« |
| CertificationMethod | P456 | string | [-] | Dopuszczalne wartości: »Measurement«, »Standard values« |
| R85RatedPower | P457 | integer | [W] | Ustalony zgodnie z pkt 1.9 załącznika 2 do regulaminu EKG ONZ nr 85 wersja 1 |
| RotationalInertia | P458 | double, 2 | [kgm2] | Określony zgodnie z pkt 8 dodatku 8 do niniejszego załącznika |
| DcDcConverterIncluded | P465 | boolean | [-] | Przyjmuje wartość »prawda«, jeżeli przetwornica DC/DC jest częścią układu maszyny elektrycznej zgodnie z pkt 4.1 niniejszego załącznika |
| IHPCType | P466 | string | [-] | Dopuszczalne wartości: »Brak«, »Zintegrowany układ przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1« |
Tabela 2
Parametry wejściowe »Electric machine system/VoltageLevels« dla każdego zmierzonego poziomu napięcia
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| VoltageLevel | P467 | integer | [V] | Jeżeli parametr »CertificationMethod« przyjmuje wartość »Standard values«, wprowadzenie parametrów wejściowych nie jest wymagane. |
| ContinuousTorque | P459 | double, 2 | [Nm] |
|
| TestSpeedContinuousTorque | P460 | double, 2 | [1/min] |
|
| OverloadTorque | P461 | double, 2 | [Nm] |
|
| TestSpeedOverloadTorque | P462 | double, 2 | [1/min] |
|
| OverloadDuration | P463 | double, 2 | [s] |
|
Tabela 3
Parametry wejściowe »Electric machine system/MaxMinTorque« dla każdego punktu pracy i dla każdego zmierzonego poziomu napięcia
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| OutputShaftSpeed | P468 | double, 2 | [1/min] |
|
| MaxTorque | P469 | double, 2 | [Nm] |
|
| MinTorque | P470 | double, 2 | [Nm] |
|
Tabela 4
Parametry wejściowe »Electric machine system/DragTorque« dla każdego punktu pracy
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| OutputShaftSpeed | P471 | double, 2 | [1/min] |
|
| DragTorque | P472 | double, 2 | [Nm] |
|
Tabela 5
Parametry wejściowe »Electric machine system/ElectricPowerMap« dla każdego punktu pracy i dla każdego zmierzonego poziomu napięcia
W przypadku zintegrowanego układu przeniesienia napędu w hybrydowych pojazdach elektrycznych typu 1 (zgodnie z definicją określoną w pkt 2 ppkt 42 niniejszego załącznika) - dla każdego punktu pracy, dla każdego zmierzonego poziomu napięcia i dla każdego biegu do jazdy do przodu.
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| OutputShaftSpeed | P473 | double, 2 | [1/min] |
|
| Moment obrotowy | P474 | double, 2 | [Nm] |
|
| ElectricPower | P475 | double, 2 | [W] |
|
Tabela 6
Parametry wejściowe »Electric machine system/Conditioning« dla każdego obiegu chłodzenia podłączonego do zewnętrznego wymiennika ciepła
Jeżeli parametr »CertificationMethod« przyjmuje wartość »Standard values«, wprowadzenie parametrów wejściowych nie jest wymagane.
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| CoolantTempInlet | P476 | integer | [°C] | Określony zgodnie z pkt 4.1.5.1 i 4.3.6 niniejszego załącznika. |
| CoolingPower | P477 | integer | [W] | Określony zgodnie z pkt 4.1.5.1 i 4.3.6 niniejszego załącznika. |
Zbiór parametrów wejściowych dla układu IEPC
Tabela 1
Parametry wejściowe »IEPC/General«
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| Manufacturer | P478 | token | [-] |
|
| Model | P479 | token | [-] |
|
| CertificationNumber | P480 | token | [-] |
|
| Date | P481 | dateTime | [-] | Data i godzina utworzenia skrótu dotyczącego danej części |
| AppVersion | P482 | token | [-] | Parametr wejściowy specyficzny dla producenta odnoszący się do narzędzi wykorzystywanych do oceniania i przetwarzania danych wynikających z pomiarów elementów |
| ElectricMachineType | P483 | string | [-] | Określony zgodnie z pkt 21 ust. 2 niniejszego załącznika. Dopuszczalne wartości: »ASM«, »ESM«, »PSM«, »RM« |
| CertificationMethod | P484 | string | [-] | Dopuszczalne wartości: »Measured for complete component«, »Measured for EM and standard values for other components«, »Standard values for all components« |
| R85RatedPower | P485 | integer | [W] | Ustalony zgodnie z pkt 1.9 załącznika 2 do regulaminu EKG ONZ nr 85 |
| RotationalInertia | P486 | double, 2 | [kgm2] | Określony zgodnie z pkt 8 dodatku 8 do niniejszego załącznika |
| DifferentialIncluded | P493 | boolean | [-] | Przyjmuje wartość »prawda«, jeżeli jednym z elementów układu IEPC jest mechanizm różnicowy |
| DesignTypeWheelMotor | P494 | boolean | [-] | Przyjmuje wartość »prawda« w przypadku silnika napędzającego bezpośrednio piastę koła typu IEPC |
| NrOf DesignTypeWheelMotorMeasured | P495 | integer | [-] | Parametr wejściowy ma znaczenie wyłącznie w przypadku silnika napędzającego bezpośrednio piastę koła typu IEPC, zgodnie z pkt 4.1.1.2 niniejszego załącznika. Dopuszczalne wartości: »1«, »2« |
Tabela 2
Parametry wejściowe »IEPC/Gears« dla każdego biegu do jazdy do przodu
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| GearNumber | P496 | integer | [-] |
|
| Ratio | P497 | double, 3 | [-] | Przełożenie prędkości wirnika maszyny elektrycznej na prędkość wału zdawczego układu IEPC |
| MaxOutputShaftTorque | P498 | integer | [Nm] | Fakultatywny |
| MaxOutputShaftSpeed | P499 | integer | [1/min] | Fakultatywny |
Tabela 3
Parametry wejściowe »IEPC/VoltageLevels« dla każdego zmierzonego poziomu napięcia
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| VoltageLevel | P500 | integer | [V] | Jeżeli parametr »CertificationMethod« przyjmuje wartość »Standard values for all components«, wprowadzenie parametrów wejściowych nie jest wymagane. |
| ContinuousTorque | P487 | double, 2 | [Nm] |
|
| TestSpeedContinuousTorque | P488 | double, 2 | [1/min] |
|
| OverloadTorque | P489 | double, 2 | [Nm] |
|
| TestSpeedOverloadTorque | P490 | double, 2 | [1/min] |
|
| OverloadDuration | P491 | double, 2 | [s] |
|
Tabela 4
Parametry wejściowe »IEPC/MaxMinTorque« dla każdego punktu pracy i dla każdego zmierzonego poziomu napięcia
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| OutputShaftSpeed | P501 | double, 2 | [1/min] |
|
| MaxTorque | P502 | double, 2 | [Nm] |
|
| MinTorque | P503 | double, 2 | [Nm] |
|
Tabela 5
Parametry wejściowe »IEPC/DragTorque« dla każdego punktu pracy i dla każdego zmierzonego biegu do jazdy do przodu (fakultatywny pomiar uzależniony od biegu zgodnie z pkt 4.2.3)
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| OutputShaftSpeed | P504 | double, 2 | [1/min] |
|
| DragTorque | P505 | double, 2 | [Nm] |
|
Tabela 6
Parametry wejściowe »IEPC/ElectricPowerMap« dla każdego punktu pracy, dla każdego zmierzonego poziomu napięcia i dla każdego biegu do jazdy do przodu
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| OutputShaftSpeed | P506 | double, 2 | [1/min] |
|
| Moment obrotowy | P507 | double, 2 | [Nm] |
|
| ElectricPower | P508 | double, 2 | [W] |
|
Tabela 7
Parametry wejściowe »IEPC/Conditioning« dla każdego obiegu chłodzenia podłączonego do zewnętrznego wymiennika ciepła
Jeżeli parametr »CertificationMethod« przyjmuje wartość »Standard values for all components«, wprowadzenie parametrów wejściowych nie jest wymagane.
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| CoolantTempInlet | P509 | integer | [°C] | Określony zgodnie z pkt 4.1.5.1 i 4.3.6 niniejszego załącznika. |
| CoolingPower | P510 | integer | [W] | Określony zgodnie z pkt 4.1.5.1 i 4.3.6 niniejszego załącznika. |
Zbiór parametrów wejściowych dla układu akumulatorów
Tabela 1
Parametry wejściowe »Battery system/General«
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| Manufacturer | P511 | token | [-] |
|
| Model | P512 | token | [-] |
|
| CertificationNumber | P513 | token | [-] |
|
| Date | P514 | dateTime | [-] | Data i godzina utworzenia skrótu dotyczącego danej części |
| AppVersion | P515 | token | [-] | Parametr wejściowy specyficzny dla producenta odnoszący się do narzędzi wykorzystywanych do oceniania i przetwarzania danych wynikających z pomiarów elementów |
| CertificationMethod | P517 | string | [-] | Dopuszczalne wartości: »Measured«, »Standard values« |
| BatteryType | P518 | string | [-] | Dopuszczalne wartości: »HPBS«, »HEBS« |
| RatedCapacity | P519 | double, 2 | [Ah] |
|
| ConnectorsSubsystemsIncluded | P520 | boolean | [-] | Istotny tylko w przypadku badania reprezentatywnego podukładu akumulatorów: przyjmuje wartość »prawda«, jeżeli badanie obejmowało reprezentatywny zespół przewodów służących do podłączenia podukładu akumulatorów. Zawsze przyjmuje wartość »prawda«, jeżeli przedmiotem badania był kompletny układ akumulatorów. |
| JunctionboxIncluded | P511 | boolean | [-] | Istotny tylko w przypadku badania reprezentatywnego podukładu akumulatorów: Przyjmuje wartość »prawda«, jeżeli badanie obejmowało reprezentatywną skrzynkę przyłączeniową wyposażoną w urządzenie odcinające i bezpieczniki. Zawsze przyjmuje wartość »prawda«, jeżeli przedmiotem badania był kompletny układ akumulatorów. |
| TestingTemperature | P521 | integer | [°C] | Określony zgodnie z pkt 5.1.4 niniejszego załącznika. Jeżeli parametr »CertificationMethod« przyjmuje wartość »Standard values«, wprowadzenie parametrów wejściowych nie jest wymagane. |
Tabela 2
Parametry wejściowe »Battery system/OCV« dla każdego zmierzonego poziomu naładowania
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| SOC | P522 | integer | [%] |
|
| OCV | P523 | double, 2 | [V] |
|
Tabela 3
Parametry wejściowe »Battery system/DCIR« dla każdego zmierzonego poziomu naładowania
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| SOC | P524 | integer | [%] | Jeżeli parametr »CertificationMethod« przyjmuje wartość »Standard values«, dla dwóch różnych wartości parametru SOC 0 % i 100 % należy podać te same wartości parametru DCIR. |
| DCIR RI2 | P525 | double, 2 | [mΩ] | Jeżeli parametr »CertificationMethod« przyjmuje wartość »Standard values«, należy podać wartość parametru DCIR ustaloną zgodnie z ppkt 1 lit. d) dodatku 10. |
| DCIR RI10 | P526 | double, 2 | [mΩ] | Jeżeli parametr »CertificationMethod« przyjmuje wartość »Standard values«, należy podać wartość parametru DCIR ustaloną zgodnie z ppkt 1 lit. d) dodatku 10. |
| DCIR RI20 | P527 | double, 2 | [mΩ] | Jeżeli parametr »CertificationMethod« przyjmuje wartość »Standard values«, należy podać wartość parametru DCIR ustaloną zgodnie z ppkt 1 lit. d) dodatku 10. |
| DCIR RI120 | P528 | double, 2 | [mΩ] | Fakultatywny, wymagany wyłącznie w przypadku akumulatorów typu HEBS. Jeżeli parametr »CertificationMethod« przyjmuje wartość »Standard values«, należy podać wartość parametru DCIR ustaloną zgodnie z ppkt 1 lit. d) dodatku 10. |
Tabela 4
Parametry wejściowe »Battery system/Current limits« dla każdego zmierzonego poziomu naładowania
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| SOC | P529 | integer | [%] | Jeżeli parametr »CertificationMethod« przyjmuje wartość »Standard values«, dla dwóch różnych wartości parametru SOC 0 % i 100 % należy podać te same wartości parametru MaxChargingCurrent, jak również parametru MaxDischargingCurrent. |
| MaxChargingCurrent | P530 | double, 2 | [A] |
|
| MaxDischargingCurrent | P531 | double, 2 | [A] |
|
Zbiór parametrów wejściowych dla układu kondensatorów
Tabela 1
Parametry wejściowe »Capacitor system/General«
| Nazwa parametru | Numer identyfikacyjny parametru | Typ | Jednostka | Opis/odniesienie |
| Manufacturer | P532 | token | [-] |
|
| Model | P533 | token | [-] |
|
| CertificationNumber | P534 | token | [-] |
|
| Date | P535 | dateTime | [-] | Data i godzina utworzenia skrótu dotyczącego danej części |
| AppVersion | P536 | token | [-] | Parametr wejściowy specyficzny dla producenta odnoszący się do narzędzi wykorzystywanych do oceniania i przetwarzania danych wynikających z pomiarów elementów |
| CertificationMethod | P538 | string | [-] | Dopuszczalne wartości: »Measurement«, »Standard values« |
| Capacitance | P539 | double, 2 | [F] |
|
| InternalResistance | P540 | double, 2 | [Ω] |
|
| MinVoltage | P541 | double, 2 | [V] |
|
| MaxVoltage | P542 | double, 2 | [V] |
|
| MaxChargingCurrent | P543 | double, 2 | [A] |
|
| MaxDischargingCurrent | P544 | double, 2 | [A] |
|
| TestingTemperature | P532 | integer | [°C] | Określony zgodnie z pkt 6.1.3 niniejszego załącznika. Jeżeli parametr »CertificationMethod« przyjmuje wartość »Standard values«, wprowadzenie parametrów wejściowych nie jest wymagane. |
| (*) | określone zgodnie z pkt 4.3.5 i 4.3.6 niniejszego załącznika |
| (**) | określone zgodnie z pkt 5.4.1.4 niniejszego załącznika |
| (***) | Regulamin ONZ nr 100 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) - Jednolite przepisy dotyczące homologacji pojazdów w zakresie szczególnych wymagań dotyczących elektrycznego układu napędowego (Dz.U. L 449 z 15.12.2021, s. 1). |
(1) "Dokładność" oznacza wartość bezwzględną odchylenia odczytu analizatora od wartości odniesienia, która została określona w normie krajowej lub międzynarodowej.
(2) Wartość "maksymalnej kalibracji" odpowiada maksymalnej przewidywanej wartości oczekiwanej w przypadku danego układu pomiarowego w ramach określonego przebiegu badawczego przeprowadzonego zgodnie z niniejszym załącznikiem pomnożonej przez 1,1.
(3) określone zgodnie z pkt 4.3.5 i 4.3.6 niniejszego załącznika
(*1) Ocenę pod kątem zgodności produkcji przeprowadza się w pierwszym roku
(*2) Ocenę pod kątem zgodności produkcji przeprowadza się w pierwszym roku
(*3) Ocenę pod kątem zgodności produkcji przeprowadza się w pierwszym roku
- Data ogłoszenia: 2022-08-12
- Data wejścia w życie: 2022-09-01
- Data obowiązywania: 2022-09-01

REKLAMA
Akty ujednolicone
REKLAMA
REKLAMA