REKLAMA
Dziennik Ustaw - rok 2020 poz. 2161
ROZPORZĄDZENIE
MINISTRA INFRASTRUKTURY1)
z dnia 26 listopada 2020 r.
w sprawie lotniczych urządzeń naziemnych i powierzchni ograniczających zabudowę
Na podstawie art. 92 ust. 1 ustawy z dnia 3 lipca 2002 r. – Prawo lotnicze (Dz. U. z 2020 r. poz. 1970) zarządza się, co następuje:
Rozdział 1
Przepisy ogólne
§ 1. [Zakres przedmiotowy]
1) klasyfikację lotniczych urządzeń naziemnych;
2) zadania zarządzającego lotniczym urządzeniem naziemnym;
3) warunki techniczne, jakie powinny spełniać lotnicze urządzenia naziemne, oraz warunki ich eksploatacji;
4) szczegółowy zakres danych ujęty we wniosku o wpis lotniczego urządzenia naziemnego do rejestru lotniczych urządzeń naziemnych w zależności od rodzaju lotniczego urządzenia naziemnego;
5) szczegółowe informacje dotyczące charakterystyki technicznej lotniczego urządzenia naziemnego;
6) szczegółowy sposób prowadzenia rejestru lotniczych urządzeń naziemnych z uwzględnieniem wymagań dotyczących dokumentacji rejestrowej;
7) sposób określania i wyznaczania granic przestrzennych powierzchni ograniczających zabudowę oraz nanoszenia ich na mapy;
8) warunki, jakie powinny spełnić obiekty na obszarze powierzchni ograniczających zabudowę.
§ 2. [Definicje]
1) COM (Communications) – urządzenia łączności;
2) DP (Data Processing) – urządzenia i systemy przetwarzania i zobrazowania danych;
3) EATMN (European Air Traffic Management Network) – europejską sieć zarządzania ruchem lotniczym;
4) FAT (Factory Acceptance Tests) – sprawdzenie poprawności działania LUN wykonywane u producenta;
5) LUN – lotnicze urządzenia naziemne, o których mowa w art. 86 ust. 1 ustawy;
6) MET (Meteorological) – automatyczne systemy pomiarowe parametrów meteorologicznych;
7) NAV (Navigation) – urządzenia radionawigacyjne;
8) NOTAM (Notice To Airmen) – wiadomość rozpowszechnianą za pomocą środków telekomunikacyjnych, zawierającą informacje o ustanowieniu, stanie lub zmianach urządzeń lotniczych, służbach, procedurach, a także o niebezpieczeństwie, których znajomość we właściwym czasie jest istotna dla personelu związanego z operacjami lotniczymi;
9) personel techniczny – personel odpowiedzialny za elektroniczne systemy bezpieczeństwa ruchu lotniczego w rozumieniu pkt 20 załącznika I do rozporządzenia nr 2017/373;
10) podmiot uprawniony – podmiot uprawniony do wykonywania operacji lotniczych patrolowania, obserwacji lub inspekcji na podstawie zgłoszenia do Prezesa Urzędu wykonywania zarobkowych operacji specjalistycznych wysokiego ryzyka;
11) Prezes Urzędu – Prezesa Urzędu Lotnictwa Cywilnego;
12) przestrzeń pokrycia – obszar przestrzeni powietrznej objęty sygnałem pochodzącym z anteny promieniującej LUN;
13) rejestr – rejestr lotniczych urządzeń naziemnych, o którym mowa w art. 88 ust. 1 ustawy;
14) rozporządzenie nr 2017/373 – rozporządzenie wykonawcze Komisji (UE) 2017/373 z dnia 1 marca 2017 r. ustanawiające wspólne wymogi dotyczące instytucji zapewniających zarządzanie ruchem lotniczym/służby żeglugi powietrznej i inne funkcje sieciowe zarządzania ruchem lotniczym oraz nadzoru nad nimi, uchylające rozporządzenie (WE) nr 482/2008, rozporządzenia wykonawcze (UE) nr 1034/2011, (UE) nr 1035/2011 i (UE) 2016/1377 oraz zmieniające rozporządzenie (UE) nr 677/2011 (Dz. Urz. UE L 62 z 08.03.2017, str. 1, z późn. zm.2));
15) rozporządzenie nr 2018/1139 – rozporządzenie Parlamentu Europejskiego i Rady (UE) 2018/1139 z dnia 4 lipca 2018 r. w sprawie wspólnych zasad w dziedzinie lotnictwa cywilnego i utworzenia Agencji Unii Europejskiej ds. Bezpieczeństwa Lotniczego oraz zmieniające rozporządzenia Parlamentu Europejskiego i Rady (WE) nr 2111/2005, (WE) nr 1008/2008, (UE) nr 996/2010, (UE) nr 376/2014 i dyrektywy Parlamentu Europejskiego i Rady 2014/30/UE i 2014/53/UE, a także uchylające rozporządzenia Parlamentu Europejskiego i Rady (WE) nr 552/2004 i (WE) nr 216/2008 i rozporządzenie Rady (EWG) nr 3922/91 (Dz. Urz. UE L 212 z 22.08.2018, str. 1);
16) SAT (Site Acceptance Test) – sprawdzenie poprawności działania LUN po jego zainstalowaniu w docelowym miejscu pracy;
17) SUR (Surveillance) – urządzenia radiolokacyjne;
18) ustawa – ustawę z dnia 3 lipca 2002 r. – Prawo lotnicze;
19) Załącznik 3 do Konwencji – Załącznik 3 „Służba meteorologiczna dla międzynarodowej żeglugi powietrznej” do Konwencji o międzynarodowym lotnictwie cywilnym, sporządzonej w Chicago dnia 7 grudnia 1944 r. (Dz. U. z 1959 r. poz. 212 i 214, z późn. zm.3)), ogłoszony w załączniku do obwieszczenia nr 20 Prezesa Urzędu Lotnictwa Cywilnego z dnia 20 grudnia 2018 r. w sprawie ogłoszenia tekstu Załącznika 3 do Konwencji o międzynarodowym lotnictwie cywilnym, sporządzonej w Chicago dnia 7 grudnia 1944 r. (Dz. Urz. ULC poz. 66);
20) Załącznik 10 do Konwencji – Załącznik 10 „Łączność lotnicza” do Konwencji o międzynarodowym lotnictwie cywilnym, sporządzonej w Chicago dnia 7 grudnia 1944 r., ogłoszony w załączniku do obwieszczenia nr 14 Prezesa Urzędu Lotnictwa Cywilnego z dnia 15 października 2018 r. w sprawie ogłoszenia tekstu Załącznika 10 do Konwencji o międzynarodowym lotnictwie cywilnym, sporządzonej w Chicago dnia 7 grudnia 1944 r. (Dz. Urz. ULC poz. 54).
Rozdział 2
Klasyfikacja LUN
§ 3. [Rodzaje LUN]
1) COM – zapewniające co najmniej:
a) ruchomą analogową lub cyfrową łączność między radiostacjami zainstalowanymi na statkach powietrznych a radiostacjami zainstalowanymi na powierzchni ziemi lub platformie morskiej, wykorzystujące zakresy fal radiowych, przeznaczone dla służb zarządzania ruchem lotniczym,
b) stałą łączność zapewniającą transmisję danych i głosu między określonymi lotniczymi stacjami stałymi połączonymi ze sobą liniami telekomunikacyjnymi, przeznaczone dla służb zarządzania ruchem lotniczym,
c) automatyczną rejestrację korespondencji pochodzącej z urządzeń, o których mowa w lit. a i b;
2) SUR – zapewniające informację o pozycji, identyfikacji i statusie statków powietrznych w przestrzeni pokrycia albo pojazdów naziemnych i statków powietrznych znajdujących się w polu ruchu naziemnego, w szczególności:
a) PSR (Primary Surveillance Radar) – pierwotne radary dozorowania,
b) SSR (Secondary Surveillance Radar) – wtórne radary dozorowania,
c) SMR (Surface Movement Radar) – radary kontroli ruchu naziemnego,
d) ADS (Automatic Dependent Surveillance) – automatyczne systemy dozorowania zależnego,
e) MLAT (Multilateration) – multilateracyjne systemy dozorowania, w tym:
– WAM (Wide Area Multilateration) – multilateracyjne systemy dozorowania obszarowego,
– LAM (Local Area Multilateration) – multilateracyjne systemy dozorowania lokalnego;
3) NAV – pozwalające statkom powietrznym na określenie własnej pozycji, w szczególności:
a) NDB (Non-Directional Beacon) – radiolatarnie bezkierunkowe,
b) DVOR (Doppler VHF Omni-directional Radio Range) – dopplerowskie radiolatarnie ogólnokierunkowe,
c) DME (Distance Measuring Equipment) – radioodległościomierze,
d) ILS LOC / ILS LLZ (Instrument Landing System – Localizer) – radiolatarnie kierunku systemu ILS,
e) ILS GP / ILS GS (Instrument Landing System – Glide Path/Slope) – radiolatarnie ścieżki schodzenia systemu ILS,
f) GBAS (Ground Based Augmentation System) – systemy wspomagające oparte na urządzeniach naziemnych;
4) MET – przeznaczone do pozyskiwania danych meteorologicznych dla potrzeb służb żeglugi powietrznej, w szczególności:
a) systemy AWOS (Automated Weather Observing System) dla lotnisk z drogami startowymi przeznaczonymi do operacji przyrządowych podejść i lądowań w kategoriach I–III, o których mowa w pkt 4.1.5 oraz 4.1.6 Załącznika 3 do Konwencji,
b) systemy AWOS przeznaczone dla operacji nieprecyzyjnych podejść i lądowań,
c) radary meteorologiczne,
d) systemy detekcji i lokalizacji wyładowań atmosferycznych;
5) DP – zapewniające przetwarzanie i zobrazowanie danych dozorowania i danych o planach lotów w celu operacyjnego zabezpieczenia żeglugi powietrznej.
Rozdział 3
Zadania zarządzającego LUN
§ 4. [Czynności poprzedzające wdrożenie LUN do pracy operacyjnej]
1) uzyskuje pozytywne wyniki:
a) testów FAT i SAT, odpowiednio od producenta i zakładającego, jeżeli testy były wykonywane,
b) analizy jakości łączy i poprawności działania systemów transmisji danych, jeżeli dotyczy;
2) zapewnia:
a) ciągłość funkcjonowania LUN, w szczególności przez zawarcie umów z podmiotami dostarczającymi usługi zewnętrzne,
b) zabezpieczenie LUN przed skutkami:
– przerw w dostawie energii elektrycznej,
– wyładowań atmosferycznych,
c) przeszkolenie personelu technicznego w zakresie obsługi i naprawy LUN;
3) wyznacza i upoważnia personel techniczny;
4) zakłada:
a) dziennik eksploatacji LUN, umożliwiający opis działań technicznych wykonywanych na LUN,
b) karty pomiarowe, umożliwiające wskazanie wartości granicznych mierzonych parametrów LUN, które podlegają sprawdzeniu i dostrojeniu w trakcie wykonywania bieżących i okresowych przeglądów technicznych, o których mowa w § 7 ust. 1 pkt 1;
5) uzyskuje od producenta oryginalny opis i instrukcję obsługi LUN, na podstawie których opracowuje instrukcję użytkowania LUN albo instrukcję eksploatacji LUN, określające co najmniej:
a) wymagania w zakresie obsługi bieżącej i okresowej, w tym opis trybu i sposobu wykonywania przez personel techniczny bieżących i okresowych przeglądów technicznych, sprawdzania i dostrajania parametrów oraz wykonywania napraw,
b) opis postępowania personelu technicznego w przypadku wystąpienia sytuacji awaryjnych;
6) posiada wyniki pomiarów natężenia pola elektromagnetycznego, jeżeli dotyczy;
7) posiada aktualne świadectwa wzorcowania lub kalibracji przyrządów pomiarowych;
8) wyznacza powierzchnie ograniczające zabudowę, z uwzględnieniem, że w przypadku COM wyznacza się je tylko dla LUN zlokalizowanych poza granicami lotniska.
2. Zarządzający LUN prowadzi:
1) dziennik eksploatacji LUN, w postaci papierowej;
2) karty pomiarowe, w postaci papierowej lub elektronicznej.
3. Zarządzający LUN niezwłocznie przekazuje Prezesowi Urzędu informacje dotyczące LUN, w szczególności w zakresie zmiany kategorii użytkowania, zmiany częstotliwości pracy, zmiany zasięgu, zmiany przeznaczenia lub zmiany oprogramowania.
4. Zarządzający LUN, na podstawie wyników kontroli, o której mowa w § 7 ust. 1 pkt 2, w przypadku NAV i SUR, albo na podstawie bieżących i okresowych przeglądów technicznych, o których mowa w § 7 ust. 1 pkt 1, oraz analizy bezpieczeństwa dotyczącej systemu AWOS, w przypadku MET, określa zakres eksploatacji LUN:
1) bez ograniczeń – jeżeli LUN spełnia warunki techniczne oraz eksploatacji;
2) z ograniczeniami – jeżeli LUN nie spełnia warunków technicznych oraz eksploatacji, niezwiązanych bezpośrednio z bezpieczeństwem operacyjnego zabezpieczenia żeglugi powietrznej, w szczególności dotyczących wymaganych wartości parametrów lub zasięgu;
3) nieużyteczny – jeżeli LUN nie spełnia warunków technicznych oraz eksploatacji związanych bezpośrednio z bezpieczeństwem operacyjnego zabezpieczenia żeglugi powietrznej.
5. Zarządzający LUN niezwłocznie przekazuje służbom informacji lotniczej oraz Prezesowi Urzędu informacje dotyczące zakresu ograniczeń eksploatacji LUN.
Rozdział 4
Warunki techniczne oraz eksploatacji LUN
§ 5. [Przepisy określające warunki techniczne oraz eksploatacji LUN]
1) przepisy rozporządzenia:
a) Komisji (WE) nr 1032/2006 z dnia 6 lipca 2006 r. ustanawiającego wymagania dla automatycznych systemów wymiany danych lotniczych dla celów powiadamiania, koordynacji i przekazywania kontroli nad lotem pomiędzy organami kontroli ruchu lotniczego (Dz. Urz. UE L 186 z 07.07.2006, str. 27, z późn. zm.4)),
b) Komisji (WE) nr 633/2007 z dnia 7 czerwca 2007 r. ustanawiającego wymagania w zakresie stosowania protokołu przesyłania komunikatów lotniczych do celów powiadamiania, koordynowania i przekazywania lotów pomiędzy organami kontroli ruchu lotniczego (Dz. Urz. UE L 146 z 08.06.2007, str. 7, z późn. zm.5)),
c) Komisji (WE) nr 29/2009 z dnia 16 stycznia 2009 r. ustanawiającego wymogi dla usług łącza danych w jednolitej europejskiej przestrzeni powietrznej (Dz. Urz. UE L 13 z 17.01.2009, str. 3, z późn. zm.6)),
d) wykonawczego Komisji (UE) nr 1207/2011 z dnia 22 listopada 2011 r. ustanawiającego wymogi dotyczące skuteczności działania i interoperacyjności systemów dozorowania w jednolitej europejskiej przestrzeni powietrznej (Dz. Urz. UE L 305 z 23.11.2011, str. 35, z późn. zm.7)),
e) wykonawczego Komisji (UE) nr 1079/2012 z dnia 16 listopada 2012 r. ustanawiającego wymogi dotyczące separacji międzykanałowej w łączności głosowej dla jednolitej europejskiej przestrzeni powietrznej (Dz. Urz. UE L 320 z 17.11.2012, str. 14, z późn. zm.8)),
f) nr 2017/373,
g) nr 2018/1139;
2) w odniesieniu do:
a) COM – tom II, III i V Załącznika 10 do Konwencji,
b) SUR i DP – tom III i IV Załącznika 10 do Konwencji,
c) NAV – tom I Załącznika 10 do Konwencji,
d) MET – Załącznik 3 do Konwencji.
2. Dodatkowe warunki techniczne oraz eksploatacji LUN określa załącznik nr 1 do rozporządzenia.
3. Testy, pomiary i dopuszczalne wartości tolerancji parametrów LUN sprawdzanych podczas kontroli z powietrza określa załącznik nr 2 do rozporządzenia.
§ 6. [Warunek eksploatacji LUN]
2. Do eksploatacji dopuszcza się LUN, które jest obsługiwane i naprawiane wyłącznie przez personel techniczny.
3. LUN będące częścią składową EATMN dopuszcza się do eksploatacji, jeżeli jest obsługiwane i naprawiane przez personel techniczny spełniający wymagania określone w załączniku XIII do rozporządzenia nr 2017/373.
§ 7. [Warunki eksploatacji danego rodzaju LUN]
1) wykonywanie bieżących i okresowych przeglądów technicznych przez personel techniczny z częstotliwością zalecaną przez producenta, jednak nie rzadziej niż:
a) raz na miesiąc w odniesieniu do SUR, DP, NAV oraz MET, z zastrzeżeniem ILS kategorii II i III, których przeglądu dokonuje się nie rzadziej niż co 30 dni, z wyłączeniem radarów meteorologicznych oraz systemów detekcji i lokalizacji wyładowań atmosferycznych, których przeglądu dokonuje się w terminach zalecanych przez producenta,
b) co 6 miesięcy – w odniesieniu do COM;
2) wykonywanie kontroli z powietrza przez inspektora podmiotu uprawnionego, przy użyciu statku powietrznego wyposażonego w system kontroli z powietrza oraz z uwzględnieniem zakresu testów, pomiarów i dopuszczalnych wartości tolerancji parametrów LUN sprawdzanych podczas kontroli z powietrza, określonych w załączniku nr 2 do rozporządzenia:
a) wdrożeniowych, wykonywanych przed wpisem LUN do rejestru dla NAV, SUR i DP,
b) okresowych, wykonywanych nie rzadziej niż co:
– 6 miesięcy dla ILS i współpracujących z nimi DME,
– 12 miesięcy dla DME niewspółpracujących z ILS, NDB i DVOR,
c) doraźnych, wykonywanych dla NAV, SUR i DP, w szczególności w przypadku podejrzenia nieprawidłowego działania lub po wymianie podstawowych elementów składowych LUN mających wpływ na nadawany sygnał, po znaczącej zmianie w środowisku w pobliżu anten LUN oraz w przypadku stwierdzenia powtarzających się okresowych zakłóceń sygnału,
d) kategoryzujących, wykonywanych dla NAV w przypadku konieczności podwyższenia kategorii systemu ILS;
3) wykonanie oceny jakości łączności między załogą znajdującą się na pokładzie statku powietrznego a operatorem radiostacji naziemnej w przestrzeni operacyjnego wykorzystania, w przypadku wdrożenia COM;
4) aktualizowanie informacji dotyczących wyznaczania powierzchni ograniczających zabudowę, w tym uwzględnienie stałych ograniczeń w pracy operacyjnej LUN, oraz przekazywanie zaktualizowanych informacji dotyczących tych powierzchni właściwym organom samorządu terytorialnego i Prezesowi Urzędu, w celu zapewnienia niezakłóconej pracy LUN.
2. W przypadku braku możliwości wykonania przeglądu technicznego, w szczególności jeżeli warunki atmosferyczne uniemożliwiają jego wykonanie lub zawieszenie LUN w pracy operacyjnej nie jest możliwe ze względów operacyjnych, dopuszcza się wydłużenie terminu, o którym mowa w ust. 1 pkt 1 lit. a, o 7 dni. Niewykonanie przeglądu technicznego w wydłużonym terminie skutkuje zawieszeniem LUN w pracy operacyjnej oraz zgłoszeniem konieczności wydania NOTAM o zawieszeniu LUN w pracy operacyjnej, do czasu wykonania przeglądu technicznego.
3. Termin następnej kontroli okresowej, o której mowa w ust. 1 pkt 2 lit. b, wyznacza inspektor wykonujący na pokładzie statku powietrznego kontrolę z powietrza. Jeżeli kontrola została wykonana w ciągu 21 dni przed datą wskazaną jako termin następnej kontroli z powietrza w ostatnim protokole kontroli, termin następnej kontroli okresowej wyznacza się przez dodanie – odpowiednio do typu LUN – maksymalnie 6 albo 12 miesięcy do dnia następnej kontroli okresowej wskazanej w ostatnim protokole kontroli.
4. W przypadku braku możliwości wykonania kontroli okresowej, o której mowa w ust. 1 pkt 2 lit. b, w szczególności jeżeli warunki atmosferyczne uniemożliwiają jej wykonanie, lub w przypadku awarii statku powietrznego lub systemu kontroli z powietrza, dopuszcza się wydłużenie terminu, o którym mowa w tym przepisie, o 21 dni. Do wyznaczenia terminu następnej kontroli okresowej przepis ust. 2 zdanie drugie stosuje się odpowiednio.
5. W przypadkach, o których mowa w ust. 4, wydłużenie terminu może być zastosowane, jeżeli praca LUN jest stabilna i udokumentowana protokołami kontroli z poprzednich kontroli z powietrza oraz pozytywnymi wynikami okresowych przeglądów technicznych.
6. W przypadku stwierdzenia niezachowania dopuszczalnych wartości tolerancji parametrów LUN, inspektor wykonujący na pokładzie statku powietrznego kontrolę z powietrza informuje o tym, przez radiostację, obsługę naziemną współpracującą w trakcie wykonywania kontroli z powietrza oraz:
1) poleca zawieszenie LUN w pracy operacyjnej i zgłasza konieczność wydania NOTAM o zawieszeniu LUN w pracy operacyjnej albo
2) wprowadza ograniczenia w użytkowaniu LUN i zgłasza konieczność wydania NOTAM o ograniczeniach w użytkowaniu LUN.
7. Inspektor wykonujący na pokładzie statku powietrznego kontrolę z powietrza informuje zarządzającego LUN o podjętych działaniach, o których mowa w ust. 6.
Rozdział 5
Rejestr
§ 8. [Wniosek o wpis do rejestru COM, SUR, DP i MET]
1) nazwę i typ LUN;
2) numer fabryczny LUN, jeżeli został nadany;
3) rodzaj LUN;
4) zasięg operacyjny LUN, jeżeli został określony;
5) zakres eksploatacji LUN wraz z opisem ograniczeń eksploatacji, jeżeli zostały określone;
6) przeznaczenie LUN;
7) nazwę systemu funkcjonalnego, w ramach którego LUN będzie wykorzystywane, jeżeli dotyczy;
8) nazwę producenta LUN;
9) nazwę zarządzającego LUN;
10) proponowany znak wywoławczy LUN albo znak rozpoznawczy LUN, jeżeli jest wymagany;
11) planowaną datę rozpoczęcia eksploatacji LUN;
12) przewidywany okres eksploatacji LUN w latach;
13) miejsce zainstalowania LUN;
14) współrzędne geograficzne miejsca zainstalowania LUN;
15) szczegółowe informacje dotyczące charakterystyki technicznej LUN, o których mowa w § 10;
16) stan techniczny LUN w oparciu o FAT i SAT lub protokół odbioru technicznego;
17) możliwości operacyjne LUN w oparciu o protokół wdrożeniowej kontroli z powietrza oraz analizę jakości łączy i poprawności działania systemów transmisji danych, jeżeli dotyczy.
2. Wniosek o wpis do rejestru NAV, wykorzystywanych w ramach EATMN, obejmuje dane:
1) o których mowa w ust. 1;
2) dotyczące kategorii ILS lub GBAS – w przypadku odpowiednio ILS lub GBAS;
3) dotyczące typu wspieranej podstawowej konstelacji satelitarnej – w przypadku GBAS.
3. Dane, o których mowa w ust. 1 i 2, wprowadza się do części A rejestru.
4. Numer w rejestrze jest nadawany w formacie: „oznaczenie części rejestru / kolejny numer w danej części rejestru z zasobu przewidzianego dla danego rodzaju LUN / dwie ostatnie cyfry roku dokonania wpisu / zmiany wpisu w rejestrze”.
5. Integralną częścią rejestru jest zbiór dokumentów w postaci papierowej, otrzymany od zarządzającego LUN lub wytworzony w procesie wpisu do rejestru.
§ 9. [Wniosek o wpis do rejestru LUN wykorzystywanych poza EATMN]
2. Dane, o których mowa w § 8 ust. 1 pkt 1–3, 5, 6, 8–15, wprowadza się do części B rejestru.
3. Przepisy § 8 ust. 4 i 5 stosuje się.
§ 10. [Szczegółowe informacje dotyczące charakterystyki technicznej LUN]
1) naziemnej radiostacji lotniczej:
a) częstotliwość pracy [MHz],
b) odstęp kanałowy [kHz],
c) moc nadajnika [W],
d) rodzaj emisji,
e) czułość odbiornika wraz z kryterium jej określenia,
f) rodzaj anteny i wzniesienie anteny,
g) polaryzację anteny radiostacji,
h) wzniesienie anteny npt [m],
i) nazwę i numer wersji oprogramowania, jeżeli dotyczy,
j) dostępne standardy sygnałów zdalnie sterujących i wyjściowych;
2) DME i DVOR:
a) częstotliwość pracy [MHz],
b) moc nadajnika [W],
c) rodzaj i typ anteny,
d) wzniesienie anteny npt [m],
e) nazwę i numer wersji oprogramowania;
3) ILS:
a) kategorię ILS,
b) wzniesienie anteny npt [m],
c) częstotliwość pracy [MHz],
d) moc nadajnika [W],
e) nazwę i numer wersji oprogramowania;
4) GBAS:
a) kategorię GBAS,
b) wzniesienie anteny VDB npt [m],
c) liczbę i wzniesienie anten referencyjnych npt [m],
d) częstotliwość pracy [MHz],
e) moc nadajnika VDB [W],
f) nazwę i numer wersji oprogramowania;
5) PSR:
a) częstotliwość pracy [MHz],
b) częstotliwość powtarzania impulsów [imp/s],
c) moc nadajnika [kW],
d) czułość odbiornika,
e) rodzaj i typ anteny,
f) wzniesienie anteny npm [m],
g) wzniesienie anteny npt [m],
h) czas jednego obrotu anteny [s],
i) nazwę i numer podstawowej wersji oprogramowania,
j) dostępne standardy danych wyjściowych;
6) SSR:
a) rodzaj i typ interrogatora,
b) typ i numer przydzielonego kodu interrogatora,
c) adres transpondera testowego,
d) moc nadajnika [kW],
e) czułość odbiornika,
f) rodzaj i typ anteny,
g) wzniesienie anteny npt [m],
h) czas jednego obrotu anteny [s],
i) nazwę i numer podstawowej wersji oprogramowania,
j) dostępne standardy danych wyjściowych;
7) systemu AWOS:
a) kategorię systemu AWOS,
b) wykaz czujników pomiarowych wchodzących w skład systemu AWOS,
c) parametry meteorologiczne mierzone przez system AWOS,
d) sposób transmisji danych z czujników do wskaźników,
e) sposób i miejsce prezentacji danych,
f) sposób i miejsce archiwizacji danych,
g) nazwę i numer wersji oprogramowania,
h) dostępne standardy sygnałów wyjściowych,
i) wysokość posadowienia czujników ciśnienia atmosferycznego.
§ 11. [Teczka LUN]
1) wniosek o wpis LUN do rejestru, wniosek o zmianę wpisu LUN w rejestrze oraz wniosek o wykreślenie LUN z rejestru;
2) dokumenty w zakresie interoperacyjności:
a) deklaracje, o których mowa w art. 45 ust. 1 rozporządzenia nr 2018/1139,
b) certyfikat, o którym mowa w art. 45 ust. 2 rozporządzenia nr 2018/1139
– jeżeli są wymagane9);
3) decyzje o wpisie LUN do rejestru, zmianie wpisu LUN w rejestrze i wykreśleniu LUN z rejestru;
4) decyzję o zatwierdzeniu zmiany w systemie funkcjonalnym dotyczącym danego LUN, jeżeli została wydana;
5) dokumenty dołączone do wniosków, o których mowa w pkt 1.
Rozdział 6
Powierzchnie ograniczające zabudowę
§ 12. [Wyznaczanie granic przestrzennych powierzchni ograniczających zabudowę]
2. Sposób określania i wyznaczania granic przestrzennych powierzchni ograniczających zabudowę określa załącznik nr 3 do rozporządzenia.
3. W celu zobrazowania na mapie, o której mowa w art. 86 ust. 8 ustawy, powierzchni ograniczających zabudowę zarządzający LUN nanosi na mapę linie reprezentujące kształt i wymiary ich granic przestrzennych w rzucie poziomym zgodnie z art. 88 ust. 5 pkt 7 ustawy. W celu przedstawienia na mapie stożkowego kształtu granic przestrzennych powierzchni ograniczających zabudowę dodatkowo na mapę nanosi się pośrednie linie dla każdych pełnych 10 metrów wysokości ograniczenia. Wysokość ograniczenia podaje się względem poziomu morza, w obowiązującym pionowym układzie odniesienia, zgodnie z przepisami wydanymi na podstawie art. 3 ust. 5 ustawy z dnia 17 maja 1989 r. – Prawo geodezyjne i kartograficzne (Dz. U. z 2020 r. poz. 2052).
4. Linie reprezentujące kształt i wymiary granic przestrzennych powierzchni ograniczających zabudowę:
1) wyznacza się w postaci danych wektorowych w powszechnie przyjętym formacie wymiany danych przestrzennych pozwalającym na odczytanie z poszczególnych rekordów informacji o geometrii oraz uzupełniającej informacji opisowej zawierającej między innymi wartości wysokości ograniczeń;
2) nanosi na mapę, o której mowa w art. 86 ust. 8 ustawy.
5. Za wysokość początkową, z której są wyprowadzone powierzchnie ograniczające zabudowę od COM, SUR, radarów meteorologicznych oraz znajdujących się poza granicami lotniska NAV, przyjmuje się wzniesienie anteny nad poziomem morza. Dla NAV znajdujących się w granicach lotniska wysokością początkową jest rzędna terenu w miejscu posadowienia podstawy anteny LUN.
§ 13. [Maksymalna wysokość nowych nieruchomych lub ruchomych obiektów planowanych na obszarze powierzchni ograniczających zabudowę]
2. W przypadku gdy nowe nieruchome lub ruchome obiekty planowane na obszarze powierzchni ograniczających zabudowę znajdują się w odległości mniejszej niż 600 metrów od LUN, bez względu na ich wysokość, nie mogą powodować zakłócenia działania LUN ze względu na materiał, z którego będą wykonane, lub promieniowanie, jakie będą emitować.
Rozdział 7
Przepis końcowy
§ 14. [Wejście w życie]
Minister Infrastruktury: A. Adamczyk
1) Minister Infrastruktury kieruje działem administracji rządowej - transport, na podstawie § 1 ust. 2 pkt 2 rozporządzenia Prezesa Rady Ministrów z dnia 18 listopada 2019 r. w sprawie szczegółowego zakresu działania Ministra Infrastruktury (Dz. U. poz. 2257 oraz z 2020 r. poz. 1722, 1745, 1927 i 2006).
2) Zmiany wymienionego rozporządzenia zostały ogłoszone w Dz. Urz. UE L 286 z 07.11.2019, str. 31.
3) Zmiany wymienionej umowy zostały ogłoszone w Dz. U. z 1963 r. poz. 137 i 138, z 1969 r. poz. 210 i 211, z 1976 r. poz. 130, 131, 188, 189, 227 i 228, z 1984 r. poz. 199 i 200, z 2000 r. poz. 446 i 447, z 2002 r. poz. 527 i 528, z 2003 r. poz. 700 i 701 oraz z 2012 r. poz. 368, 369, 370 i 371.
4) Zmiany wymienionego rozporządzenia zostały ogłoszone w Dz. Urz. UE L 13 z 17.01.2009, str. 20 oraz Dz. Urz. UE L 153 z 17.06.2009, str. 29.
5) Zmiany wymienionego rozporządzenia zostały ogłoszone w Dz. Urz. UE L 77 z 23.03.2011, str. 23.
6) Zmiany wymienionego rozporządzenia zostały ogłoszone w Dz. Urz. UE L 104 z 24.04.2009, str. 58, Dz. Urz. UE L 130 z 01.05.2014, str. 37, Dz. Urz. UE L 56 z 27.02.2015, str. 30, Dz. Urz. UE L 183 z 09.07.2019, str. 183 oraz Dz. Urz. UE L 43 z 17.02.2020, str. 72.
7) Zmiany wymienionego rozporządzenia zostały ogłoszone w Dz. Urz. UE L 284 z 30.09.2014, str. 7, Dz. Urz. UE L 59 z 07.03.2017, str. 34 oraz Dz. Urz. UE. L z 138 z 30.04.2020, str. 1.
8) Zmiany wymienionego rozporządzenia zostały ogłoszone w Dz. Urz. UE L 190 z 11.07.2013, str. 37, Dz. Urz. UE L 348 z 21.12.2016, str. 11 oraz Dz. Urz. UE L 304 z 21.11.2017, str. 47.
9) Do dnia rozpoczęcia stosowania aktów delegowanych, o których mowa w art. 47 rozporządzenia nr 2018/1139, na podstawie art. 139 ust. 2 tego rozporządzenia, stosuje się przepisy art. 4, 5, 6, 6a i 7 oraz załączniki III i IV do rozporządzenia (WE) nr 552/2004 Parlamentu Europejskiego i Rady z dnia 10 marca 2004 r. w sprawie interoperacyjności Europejskiej Sieci Zarządzania Ruchem Lotniczym (Rozporządzenie w sprawie interoperacyjności) (Dz. Urz. UE L 96 z 31.03.2004, str. 26 - Dz. Urz. UE Polskie wydanie specjalne, rozdz. 7, t. 8, str. 46, Dz. Urz. UE L 173 z 03.07.2007, str. 44, Dz. Urz. UE L 153 z 12.06.2008, str. 42 oraz Dz. Urz. UE L 300 z 14.11.2009, str. 34).
10) Niniejsze rozporządzenie było poprzedzone rozporządzeniem Ministra Infrastruktury i Budownictwa z dnia 2 grudnia 2016 r. w sprawie lotniczych urządzeń naziemnych (Dz. U. z 2017 r. poz. 55), które zgodnie z art. 18 ustawy z dnia 14 grudnia 2018 r. o zmianie ustawy - Prawo lotnicze oraz niektórych innych ustaw (Dz. U. z 2019 r. poz. 235) utraciło moc z dniem 2 października 2020 r.
Załączniki do rozporządzenia Ministra Infrastruktury
z dnia 26 listopada 2020 r. (poz. 2161)
Załącznik nr 1
DODATKOWE WARUNKI TECHNICZNE ORAZ EKSPLOATACJI LOTNICZYCH URZĄDZEŃ NAZIEMNYCH
1. COM (Communications) – urządzenia łączności
Projektuje, instaluje, konfiguruje i utrzymuje się w sposób zapewniający możliwie najwyższą jakość, dostępność i ciągłość usług, w tym przy użyciu systemu bezprzerwowego zasilania UPS (Uninterruptible Power Supply), oraz wyposaża się we wskaźniki informujące na bieżąco personel techniczny o awarii urządzenia lub awarii jego zasilania podstawowego.
1.1. Urządzenia łączności ruchomej.
1.1.1. Umożliwiają nadawanie i odbiór w zakresie częstotliwości 117,975–137,000 MHz z odstępem międzykanałowym 25 kHz lub 8,33 kHz, przy czym pierwszą przydzieloną częstotliwością jest 118,000 MHz, a ostatnią – 136,975 MHz.
1.1.2. Umożliwiają uzyskanie natężenia pola elektrycznego (gęstości mocy) o wartości co najmniej 75 mikrowolt na metr (–109 dBW/m2), na zdefiniowanej przestrzeni pokrycia, dla:
1) służb kontroli lotniska (TWR – Aerodrome Control Tower);
2) służb kontroli zbliżania (APP – Approach Control Service);
3) służb kontroli obszaru (ACC – Area Control Service);
4) służb informacji powietrznej (FIS – Flight Information Service);
5) lotniskowych służb informacji lotniczej (AFIS – Aerodrome Flight Information Service);
6) urządzeń rozgłaszania informacji meteorologicznej VOLMET;
7) urządzeń systemu rozgłaszania ATIS.
1.1.3. Zapewniają transmisję danych zgodnie z częstotliwościami radiowymi wykorzystywanymi przez służby żeglugi powietrznej w przestrzeni pokrycia opublikowanej w AIP Polska – Zbiorze Informacji Lotniczych, wchodzącym w skład Zintegrowanego Pakietu Informacji Lotniczych, o którym mowa w art. 121 ust. 3 ustawy z dnia 3 lipca 2002 r. – Prawo lotnicze (Dz. U. z 2020 r. poz. 1970), zwanym dalej „AIP Polska”.
1.1.4. Wyposaża się w anteny zapewniające polaryzację pionową o współczynniku fali stojącej w zakresie pracy 118,000–137,000 MHz, który zawiera się w przedziale od 1 do 2, posiadające charakterystykę promieniowania dookólną lub kierunkową w zastosowaniach specjalnych.
1.1.5. Wyposaża się w anteny lub system antenowy zaprojektowane z uwzględnieniem ekstremalnych warunków pogodowych, w szczególności odporności na wiatr o prędkości do 160 km/h i wyładowania atmosferyczne.
1.1.6. Mogą być obsługiwane przez jedną antenę lub jeden system antenowy, z uwzględnieniem potrzeby lokalizowania części nadawczej danego systemu w odległości zapewniającej niezakłóconą pracę części odbiorczej.
1.1.7. Cyfrowe wykorzystują emisję oznaczoną odpowiednio jako:
1) 13K0A2DAN dla systemu transmisji krótkich wiadomości tekstowych między statkami powietrznymi i stacjami naziemnymi ACARS (Aircraft Communications Addressing and Reporting System) wykorzystując modulację z minimalną zmianą częstotliwości MSK (Minimum Shift Keying);
2) 14K0G1D dla łącza VDL Mode 2 (Very High Frequency Digital Link – Mode 2) wykorzystującego modulację D8PSK i 13K0F7D;
3) 13K0F7D dla łącza VDL Mode 4 (Very High Frequency Digital Link – Mode 4) wykorzystującego modulację z ciągłą fazą i minimalną zmianą częstotliwości GFSK (Gaussian Frequency Shift Keying).
1.1.8. Analogowe wykorzystują emisję dwuwstęgową z modulacją amplitudy DSB–AM (Amplitude Modulation–DoubleSide Band), oznaczoną jako:
1) 6K80A3EJN dla odstępu międzykanałowego 25 kHz;
2) 5K00A3EJN dla odstępu międzykanałowego 8,33 kHz.
1.2. Urządzenia łączności stałej.
1.2.1. Urządzenia transmisji danych służą do wymiany depesz lotniczych i mogą tworzyć:
1) system przekazywania danych o lotach OLDI (OnLine Data Interchange);
2) stałą telekomunikacyjną sieć lotniczą AFTN (Aeronautical Fixed Telecommunication Network);
3) wspólną sieć wymiany danych ICAO CIDIN (Common ICAO Data Interchange Network);
4) system wymiany depesz służb ruchu lotniczego ATSMHS (Air Traffic Services Message Handling System);
5) pozostałe operacyjne łącza, sieci oraz systemy przesyłania informacji dotyczących żeglugi powietrznej.
1.2.2. Urządzenia łączności stałej mogą posiadać oznaczenie lokalizacji (Location Indicators), które jest publikowane przez Międzynarodową Organizację Lotnictwa Cywilnego (ICAO) w wydawanym co kwartał dokumencie Doc 7910.
1.2.3. Urządzenia transmisji głosu posiadają sieci oraz bezpośrednie łącza telefoniczne służb ruchu lotniczego ATS (Air Traffic Services) i systemy integracji łączności głosowej VCS (Voice Communications System), zapewniające co najmniej:
1) jeden z poniższych dostępów:
a) natychmiastowy,
b) bezpośredni,
c) pośredni;
2) identyfikację strony wywołującej i wywoływanej;
3) połączenia pilne i priorytetowe;
4) połączenia konferencyjne.
1.2.4. Spełniają odpowiednie międzynarodowe normy ISO (International Organization for Standarization) i IEC (International Electrotechnical Commission) oraz zalecenia ITU–T (International Telecommunication Union – Telecommunication Standardization Sector).
1.3. Urządzenia automatycznej rejestracji korespondencji.
1.3.1. Umożliwiają automatyczny zapis informacji, czasu i daty, przy czym do zapisu czasu wykorzystuje się uniwersalny czas skoordynowany UTC (Coordinated Universal Time).
1.3.2. Utrzymują dokładność zapisu czasu w zakresie +/–2 sekundy, z wyjątkiem urządzeń transmisji danych, gdzie dokładność wynosi +/–1 sekunda.
1.3.3. Umożliwiają rejestrację korespondencji i przechowywanie jej przez okres co najmniej 30 dni od dnia utworzenia zapisu.
2. SUR (Surveillance) – urządzenia radiolokacyjne
2.1. Projektuje, instaluje, konfiguruje i utrzymuje się w sposób zapewniający:
1) możliwie najwyższą jakość, dostępność i ciągłość usług;
2) nieprzerwaną pracę w przypadku awarii zasilania – stosowanie automatycznie włączających się awaryjnych zespołów prądotwórczych oraz zasilanie urządzeń poprzez UPS, z wyjątkiem systemów o architekturze rozproszonej.
2.1.1. Wyposaża się w systemy diagnostyczno-monitorujące, które umożliwiają wyznaczonemu personelowi technicznemu bieżące sprawdzanie stanu lotniczego urządzenia naziemnego, oraz w systemy zapewniające bezpieczeństwo personelu technicznego.
2.1.2. W celu zapewnienia ciągłości usługi dozorowania urządzenia posiadają nadmiarowe bloki funkcjonalne, poza elementami toru antenowego i falowodowego, lub współpracują z urządzeniami pełniącymi identyczne funkcje w danym rejonie kontroli ruchu lotniczego gwarantującymi natychmiastowe przejęcie zadań w przypadku awarii.
2.1.3. W zależności od rodzaju radaru i rodzaju pracy (modu) zapewniają co najmniej informacje o:
1) pozycji statku powietrznego;
2) tożsamości statku powietrznego.
2.1.4. Zapewniają odświeżanie informacji o położeniu statku powietrznego w przestrzeni pokrycia nie rzadziej niż:
1) raz na 5 sekund – dla urządzenia wykorzystywanego do kontroli zbliżania;
2) raz na 8 sekund – dla urządzenia wykorzystywanego do kontroli obszaru.
2.1.5. Umożliwiają wykrycie statku powietrznego poruszającego się z prędkością kątową w zakresie 25–800 węzłów z prawdopodobieństwem na poziomie nie mniejszym niż wymagany dla danego lotniczego urządzenia naziemnego.
2.1.6. Zapewniają dokładność informacji o statku powietrznym na poziomie nie mniejszym niż wymagany dla danego urządzenia dozorowania.
3. NAV (Navigation) – urządzenia radionawigacyjne
3.1. Projektuje, instaluje, konfiguruje i utrzymuje się w sposób zapewniający możliwie najwyższą jakość, dostępność i ciągłość usług oraz wyposaża się we wskaźniki informujące na bieżąco wyznaczony personel techniczny o awarii urządzenia lub awarii jego zasilania energetycznego.
3.2. Dostarczają statkom powietrznym właściwe informacje co najmniej w przestrzeni ich pokrycia opublikowanej w AIP Polska.
3.3. Posiadają zdublowane urządzenia nadawcze lub nadawczo-odbiorcze w celu zapewnienia ciągłości zapewnianego sygnału nawigacyjnego.
3.4. Gdy nie pracują operacyjnie, nie nadają swojego znaku rozpoznawczego. Nadają w tym czasie znak rozpoznawczy „TST” lub w treści depeszy nawigacyjnej nadają komunikat uniemożliwiający wykorzystanie ich do celów operacyjnych.
3.5. Wykorzystywane w procedurach podejścia do lądowania są zasilane w sposób zapewniający ich bezprzerwową pracę co najmniej przez 30 minut od chwili wystąpienia awarii zasilania.
3.6. Wykorzystywane jako trasowe są zasilane w sposób zapewniający ich bezprzerwową pracę co najmniej przez 2 godziny od chwili wystąpienia awarii zasilania.
3.7. Systemy precyzyjnego podejścia (ILS) kategorii II lub III posiadają co najmniej dwa monitory kontrolujące pracę każdego nadajnika oraz urządzenia monitorujące pole bliskie, a dla kategorii III także pole dalekie radiolatarni kierunku, które nie jest jednak urządzeniem wykonawczym – nie powoduje przełączenia/wyłączenia ILS.
3.8. ILS wyposaża się w system uruchamiający alarm na konsoli zdalnego sterowania lub monitorowania niepowodujący wyłączenia urządzenia, który włącza się w chwili utraty łączności z danym urządzeniem.
3.9. ILS kategorii III wyposaża się w dwa zestawy nadajników pracujących równolegle, przy czym jeden nadajnik pracuje operacyjnie, a drugi na sztuczne obciążenie, co umożliwia stałe monitorowanie ich parametrów.
3.10. Znajdujące się na przeciwległych końcach drogi startowej ILS, stanowiące dwa odrębne systemy, są przełączane w ten sposób, że w danej chwili pracuje operacyjnie tylko jeden system i nie jest możliwe włączenie systemu niepracującego operacyjnie.
3.11. Systemy wspomagające oparte na urządzeniach naziemnych (GBAS) zapewniają nieprzerwaną pracę w przypadku awarii zasilania energetycznego – są zasilane stale przez UPS z dwóch niezależnych linii energetycznych. W przypadku braku możliwości zapewnienia zasilania w postaci dwóch niezależnych linii energetycznych, urządzenia systemu naziemnych stacji GBAS są wyposażone w automatycznie załączający się agregat prądotwórczy zapewniający pracę co najmniej przez 12 godzin.
4. MET (Meteorological) – automatyczne systemy pomiarowe parametrów meteorologicznych
4.1. Projektuje, instaluje, konfiguruje i utrzymuje się w sposób zgodny z dokumentacją projektową oraz obowiązującymi normami i wymaganiami dotyczącymi systemów i przyrządów meteorologicznych, a w szczególności uwzględniając:
1) wymagania dla przyjętych minimów operacji przyrządowych podejść i lądowań w kategoriach I–III oraz nieprecyzyjnych podejść i lądowań;
2) wymagania dotyczące lokalizacji, wyposażenia we wskaźniki, instalacji oraz zasilania urządzeń pomiarowych określone w Załączniku 3, Załączniku 11 i Załączniku 14 do Konwencji o międzynarodowym lotnictwie cywilnym, sporządzonej w Chicago dnia 7 grudnia 1944 r. (Dz. U. z 1959 r. poz. 212 i 214, z późn. zm.1)), zwanej dalej „Konwencją”, oraz zobrazowania danych i informacji meteorologicznych dla służb żeglugi powietrznej zgodnie z wymaganiami uzgodnionymi w porozumieniach zawartych między zarządzającym lotniczym urządzeniem naziemnym a użytkownikiem;
3) określenie położenia czujników systemu AWOS (Automated Weather Observing System) przez podanie współrzędnych poziomych w układzie WGS'84 i wysokości w układzie współrzędnych pionowych Kronsztadt'86 oraz odległości poszczególnych czujników względem progu i osi drogi startowej; wysokość poziomu pomiaru ciśnienia wymagana do obliczenia rzeczywistego ciśnienia atmosferycznego na poziomie lotniska (QFE) jest wyznaczana względem poziomu odniesienia lotniska opublikowanego w AIP Polska z uwzględnieniem wymagań określonych w pkt 4.7.2 dodatku 3 Załącznika 3 do Konwencji; wysokość podstawy chmur jest wyznaczana z uwzględnieniem wymagań określonych w pkt 4.5.3 dodatku 3 Załącznika 3 do Konwencji; wyznaczenie położenia czujników jest wykonane przez uprawnionego geodetę;
4) zapewnienie kontroli oraz regulacji z miejsca montażu urządzenia i miejsca stałego przebywania wyznaczonego personelu technicznego, co najmniej w zakresie podstawowych parametrów automatycznych systemów pomiarowych;
5) zapewnienie współpracy z systemami obróbki sygnałów oraz urządzeniami do transmisji danych;
6) zapewnienie rejestracji mierzonych parametrów wraz ze wskaźnikami dotyczącymi daty i czasu obserwacji;
7) zapewnienie możliwie najwyższej jakości, dostępności i ciągłości usług oraz operacyjnie pożądanej dokładności pomiarów i obserwacji określonej w załączniku A Załącznika 3 do Konwencji.
4.2. Radary meteorologiczne wykorzystywane do osłony meteorologicznej lotnictwa, których parametry i sposób wykonywania pomiarów zostały dostosowane do pomiaru obiektów meteorologicznych, zapewniają:
1) nominalną częstotliwość pracy w zakresie 2700–10 000 MHz;
2) ciągły, nie krótszy niż 3500 godzin rocznie, tryb pracy operacyjnej;
3) kątowy zakres obrotu anteny radaru w azymucie 0°–360° z dokładnością pozycjonowania anteny ≤ 0,5º
4) kątowy zakres ruchu anteny radaru w elewacji ≥ 0°–30º z dokładnością pozycjonowania anteny ≤ 0,2º
5) stosunek poziomu wiązek bocznych do wiązki głównej anteny ≤ –23 dB;
6) prędkość obrotową anteny w azymucie ≥ 12º/s;
7) długość impulsu sondującego 0,1–4 µs;
8) dynamiczny zakres odbiornika ≥ 80 dB;
9) zdolność do rejestracji sygnałów o minimalnej mocy ≤ –100 dBm.
4.3. Przy projektowaniu systemów AWOS dla lotnisk z drogami startowymi przeznaczonymi do operacji przyrządowych podejść i lądowań w kategoriach I–III, określonych w pkt 4.1.5 i 4.1.6 dodatku 3 Załącznika 3 do Konwencji, należy uwzględnić aspekty czynnika ludzkiego oraz procedury awaryjne.
4.4. Systemy AWOS dla operacji nieprecyzyjnych podejść i lądowań umożliwiają zautomatyzowany pomiar co najmniej kierunku i prędkości wiatru, temperatury i wilgotności powietrza oraz ciśnienia atmosferycznego wymaganego do obliczeń ciśnienia na poziomie lotniska albo progu drogi startowej lotniska i ciśnienia QNH (Altimeter sub-scale setting to obtain elevation when on the ground).
4.5. Systemy detekcji i lokalizacji wyładowań atmosferycznych wykrywają wyładowania wszystkich typów oraz umożliwiają określenie ich rodzaju, czasu wystąpienia i lokalizacji.
5. DP (Data Processing) – urządzenia i systemy przetwarzania i zobrazowania danych
Projektuje, instaluje, konfiguruje i utrzymuje się w sposób zapewniający możliwie najwyższą jakość, wiarygodność i dostępność, a ich infrastruktura zapewnia ciągłość i dostępność danych w przypadku awarii podstawowego zasilania energetycznego albo awarii podstawowego łącza przesyłania danych. Wyposaża się w urządzenia umożliwiające rejestrację i odtwarzanie zarejestrowanej sytuacji powietrznej.
5.1. Systemy przetwarzania i zobrazowania danych radarowych i planów lotu zapewniają co najmniej zobrazowanie następujących danych i realizowanie co najmniej poniższych funkcji:
1) położenie statku powietrznego;
2) wysokość lotu statku powietrznego;
3) identyfikacja statku powietrznego;
4) wybór zasięgu zobrazowania;
5) wybór dostępnych map;
6) wybór długości linii łączącej symbol pozycyjny z etykietą;
7) możliwość określenia odległości obiektu przez znaczniki odległości;
8) możliwość zmiany położenia etykiety;
9) przesunięcie zobrazowania względem środka jego układu;
10) STCA (Short Term Conflict Alert) – ostrzeżenie o minimalnej bezpiecznej wysokości bezwzględnej, jeżeli ma zastosowanie;
11) MSAW (Minimum Safe Altitude Warning) – krótkoterminowe ostrzeżenie o sytuacji konfliktowej, jeżeli ma zastosowanie;
12) APW (Area Proximity Warning) – ostrzeżenie o bliskości strefy, jeżeli ma zastosowanie;
13) obsługę standardowych formatów danych z urządzeń dozorowania i planów lotu;
14) wykorzystanie standardowych rozwiązań wymiany informacji z systemami sąsiednimi.
5.2. Zobrazowanie na ekranie umożliwia identyfikację w szczególności:
1) typu danych;
2) impulsów specjalnych identyfikacji pozycji SPI (Special Position Identification);
3) kodów specjalnych;
4) powiązania etykiet z symbolem określającym położenie obiektu dozorowanego.
5.3. Zobrazowanie zapewnia ponadto zwrócenie uwagi personelu, przez zmianę koloru opisu lub jego miganie albo przez sygnał dźwiękowy, w przypadku gdy system wykryje jeden z poniższych kodów:
1) 7700 – „Niebezpieczeństwo”;
2) 7600 – „Awaria radiostacji”;
3) 7500 – „Porwanie!”.
1) Zmiany wymienionej umowy zostały ogłoszone w Dz. U. z 1963 r. poz. 137 i 138, z 1969 r. poz. 210 i 211, z 1976 r. poz. 130, 131, 188, 189, 227 i 228, z 1984 r. poz. 199 i 200, z 2000 r. poz. 446 i 447, z 2002 r. poz. 527 i 528, z 2003 r. poz. 700 i 701 oraz z 2012 r. poz. 368, 369, 370 i 371.
Załącznik nr 2
TESTY, POMIARY I DOPUSZCZALNE WARTOŚCI TOLERANCJI PARAMETRÓW LOTNICZYCH URZĄDZEŃ NAZIEMNYCH SPRAWDZANYCH PODCZAS KONTROLI Z POWIETRZA
Tabela T.1.1. Dopuszczalna wartość tolerancji parametru urządzeń łączności (COM) sprawdzanych podczas kontroli z powietrza
| Parametr | Wartość |
| Natężenie pola elektrycznego (gęstość mocy) | ≥ 75 µV/m (–109 dbW/m2) |
Tabela T.2.1. Testy i pomiary urządzeń radiolokacyjnych (SUR) do wykonania podczas kontroli z powietrza
| Test lub pomiar | Typ radaru | |
| PSR | MSSR | |
| Sprawdzenie maksymalnego zasięgu radaru na różnych wysokościach | √ | √ |
| Sprawdzenie pokrycia radarowego na wybranych azymutach | √ | √ |
| Sprawdzenie dokładności danych o obiekcie (azymut, odległość) | √ | √ |
| Sprawdzenie dekodowania wysokości w modzie C lub S | – | √ |
| Sprawdzenie poprawności przekazywania informacji w modzie A lub S | – | √ |
| Pomiar ogólnego prawdopodobieństwa wykrycia | √ | √ |
| Pomiar czasu przełączania kanałów | √ | √ |
| Zobrazowanie sytuacji na wskaźnikach operacyjnych | √ | √ |
| Zobrazowanie sytuacji na wskaźnikach technicznych | √ | √ |
Tabela T.3.1. Dopuszczalne wartości tolerancji parametrów radiolatarni bezkierunkowych (NDB) sprawdzanych podczas kontroli z powietrza
| Parametr | Odniesienie do pkt Załącznika 10 Tom I do Konwencji* | Mierzona wielkość lub wymagana cecha | Dopuszczalne tolerancje lub cel, który musi być osiągnięty podczas kontroli z powietrza | Dokładność pomiaru | Rodzaj kontroli** | |
| W | O | |||||
| Sygnał identyfikacyjny | 3.4.5.1 | Znak identyfikacyjny nadawany alfabetem Morse'a | Czytelny i poprawny do granicy zasięgu | Ocena subiektywna | √ | √ |
| Zasięg na orbicie | 3.4.2 | Moc sygnału lub kurs lub kluczowanie | Minimalna moc sygnału wymaganego na danym obszarze geograficznym. Oscylacje igły ADF nie mogą przekraczać +/–10° w przestrzeni pokrycia | 3dB 2,0° | √ | √ |
| Zasięg w drodze lotniczej | 3.4.2 | Kurs | Oscylacje igły ADF nie mogą przekraczać +/–10° w przestrzeni pokrycia*** | 2,0° | √ | √ |
| Strefa oczekiwania i procedura zbliżania |
| Kurs | Oscylacje igły nie mogą przekraczać +/–5° oraz nie mogą wystąpić mylące odwrócenia igły dające fałszywe wrażenie przejścia nad stacją |
| √ | √ |
| * Konwencja o międzynarodowym lotnictwie cywilnym, sporządzona w Chicago dnia 7 grudnia 1944 r. (Dz. U. z 1959 r. poz. 212 i 214, z późn. zm.). ** W – kontrola wdrożeniowa, O – kontrola okresowa. *** Radiolatarnia bezkierunkowa (NDB) może być uznana za działającą poprawnie, mimo że wskazanie kierunku przekracza tolerowaną wartość, jeżeli jest to spowodowane oscylacjami igły ADF, o ile oscylacje trwały mniej niż 4 sekundy – w przypadku radiolatarni wykorzystywanej jako pomoc zbliżania albo mniej niż 8 sekund – w przypadku radiolatarni wykorzystywanej jako pomoc trasowa. | ||||||
Tabela T.3.2. Dopuszczalne wartości tolerancji parametrów radiolatarni ogólnokierunkowych (VOR) sprawdzanych podczas kontroli z powietrza
| Parametr | Odniesienie do pkt Załącznika 10 Tom I do Konwencji* | Mierzona wielkość lub wymagana cecha | Dopuszczalne tolerancje | Dokładność pomiaru | Rodzaj kontroli** | |
| W | O | |||||
| Rotacja | 3.3.1.1 | Zgodnie z ruchem wskazówek zegara | poprawna |
| √ | √ |
| Orientacja | 3.3.1.3 | Poprawność | poprawna |
| √ | √ |
| Polaryzacja | 3.3.3.1 | Dewiacja | +/–2,0° | 0,3° | √ | √ |
| Dokładność charakterystyk: – błąd ustawienia – ugięcia – falowania i wyzębienia – przydatność do nawigacji | 3.3.3 | Dewiacja | +/–2,0° +/–3,5° +/–3,0° | 0,6° 0,6° 0,3° | √ | √ |
| Ocena pilota | Zdatne | Subiektywne | ||||
| Zasięg użytkowy | 3.3.4 | Natężenie pola elektrycznego (gęstość mocy) | 90 µV/m (–107 dBW/m2) | 3 dB | √ | √ |
| Modulacja 9960 Hz 30 Hz | 3.3.5 | Głębokość modulacji | VOR wartość nominalna: 28–32% dla kąta <5° 9960 Hz (bez modulacji głosowej): 20–55%, 9960 Hz (z modulacją głosową): 20–35% 30 Hz: 25–35% | +/–1% | √ | √ |
| Sygnał odniesienia/zmienny | 3.3.5.1 | Wskaźnik dewiacji modulacji 30 Hz | CVOR: 16+/–1 DVOR: (do 5° elewacji) 16+/–1 DVOR: (5° do 40° elewacji) >11 |
| √ | √ |
| Sygnał identyfikacyjny | 3.3.6.5 | Sygnał identyfikacyjny nadawany Morse'm | Czytelny i poprawny do granicy zasięgu | Ocena subiektywna | √ | √ |
| Monitorowanie kierunku (radial odniesienia) | 3.3.7.1 | Dewiacja | +/–1,0° | 0,3° | √ |
|
| * Konwencja o międzynarodowym lotnictwie cywilnym, sporządzona w Chicago dnia 7 grudnia 1944 r. ** W – kontrola wdrożeniowa, O – kontrola okresowa | ||||||
Tabela T.3.3. Dopuszczalne wartości tolerancji parametrów radioodległościomierzy (DME) sprawdzanych podczas kontroli z powietrza
| Parametr | Odniesienie do pkt Załącznika 10 Tom I do Konwencji* | Mierzona wielkość lub wymagana cecha | Dopuszczalne tolerancje | Dokładność pomiaru | Rodzaj kontroli** | |
| W | O | |||||
| Zasięg | 3.5.3.1.2 | Poziom AGC (Automatic Gain Control) | Sygnał zapewniający natężenie pola elektrycznego (gęstość mocy) ≥–89 dBW/m2 do granic zasięgu lub wg wymogów operacyjnych | do 5 dB | √ | √ |
| Dokładność | 3.5.4.5 | Odległość | ≤150 m ≤75 m dla urządzeń współpracujących z systemami podejścia do lądowania | 50 m | √ | √ |
| Kształt impulsu | 3.5.4.1.3 | Czas, amplituda | Czas narastania ≤3 µs Czas trwania =3,5 µs, +/–0,5 µs Czas zanikania ≤3,5 µs Amplituda: między 95% wzrostu lub spadku amplitudy, ≥95% maksymalnej amplitudy | 0,1 µs 1% | √ | – |
| Odstęp między impulsami | 3.5.4.1.4 | Czas, amplituda | Kanał X: 12 +/–0,25 µs Kanał Y: 30 +/–0,25 µs | 0,05 µs | √ | – |
| Sygnał identyfikacyjny | 3.5.3.6 | Sygnał identyfikacyjny nadawany Morse'm | Czytelny i poprawny | Ocena subiektywna | √ | √ |
| Skuteczność odpowiedzi |
| Zmiany skuteczności, pozycja | Wskazać obszary, gdzie zmiany są znaczące | Nie dotyczy | √ | √ |
| Wyłączenia |
| Wyłączenie, pozycja | Wskazać, gdzie następuje wyłączenie | Nie dotyczy | √ | √ |
| * Konwencja o międzynarodowym lotnictwie cywilnym, sporządzona w Chicago dnia 7 grudnia 1944 r. ** W – kontrola wdrożeniowa, O – kontrola okresowa | ||||||
Tabela T.3.4. Dopuszczalne wartości tolerancji parametrów radiolatarni kierunku systemu ILS (ILS LOC) sprawdzanych podczas kontroli z powietrza
| Parametr | Odniesienie do pkt Załącznika 10 Tom I do Konwencji* | Mierzona wielkość lub wymagana cecha | Dopuszczalne tolerancje | Dokładność pomiaru | Rodzaj kontroli** | |
| W | O | |||||
| Sygnał identyfikacyjny | 3.1.3.9 | Sygnał identyfikacyjny nadawany Morse'm | Czytelny i poprawny | Ocena subiektywna | √ | √ |
| Modulacja – Głębokość | 3.1.3.5 3.1.3.5.3.6.1 | Głębokość modulacji | 18%–22% <60% SDM pomiędzy +/–35°azymutu lub w sektorze pokrycia dla systemów zainstalowanych po styczniu 2000 r. | +/–0,5% | √ | √ |
| Czułość przemieszczania | 3.1.3.7.2 3.1.3.7.3 | DDM | Kategoria I: +/–17% wartości nominalnej Kategoria II: +/–17% wartości nominalnej Kategoria III: +/–10% wartości nominalnej | +/–3 µA +/–3 µA +/– 2 µA przy Iwej=150 µA | √ | √ |
| Wyrazistość poza linią kierunku | 3.1.3.7.4 | DDM | Z każdej strony linii kursu: liniowy wzrost do 175 µA, potem utrzymanie 175 µA do 10°. Pomiędzy 10° a 35° min. 150 µA. Tam, gdzie jest wymagane pokrycie poza +/–35°, min. 150 µA. | +/–5 µA przy Iwej=150 µA | √ | √ |
| Wyrazistość dla dużych kątów |
| DDM | Minimum 150 µA. | +/–5 µA przy Iwej=150 µA | √ | √ |
| Dokładność ustawienia osi kierunku | 3.1.3.6.1 3.1.3.6.2 | DDM, przemieszczenie, kąt | Odpowiednio dla przemieszczeń w punkcie odniesienia ILS: Kategoria I: +/–10,5 m (35 ft) Kategoria II: +/–7,5 m (25 ft) Kategoria III: +/–3 m (10 ft) | Kat. I: +/–2 m Kat II: +/–1 m Kat III: +/–0,7 m | √ | √ |
| Struktura osi kierunku | 3.1.3.4 Patrz Dodatek C, Przypis do 2.1.3 | DDM | Od najdalszego krańca pokrycia do punktu A: 30 µA dla wszystkich kategorii Od punktu A do punktu B: Kategoria I: liniowy spadek do 15 µA Kategoria II: liniowy spadek do 5 µA Kategoria III: liniowy spadek do 5 µA Poza punktem B: Kategoria I: 15 µA do punktu C Kategoria II: 5 µA do punktu odniesienia Kategoria III: 5 µA do punktu D, potem liniowy wzrost do 10 µA do punktu E. | Dodatek C, 2.1.5 Od punktu A do B, 3 µA malejąco do 1 µA Od punktu B do E, 1 µA | √ | √ |
| Zasięg użyteczny | 3.1.3.3 Patrz Zał.10, Tom I, Dodatek C, Rys. C-7A i C-8A (C-7B i C-8B dla LOC o zmniejszonym zasięgu) | DDM | –114 dBW/m2 (40 µV/m) w obrębie wykorzystania operacyjnego LOC do odległości 46, 3 km (25 NM) oraz w sektorze LOC i na GP: | +/–3 dB | √ | √ |
| Natężenie pola | Natężenie pola | Kategoria I: nie mniej niż 90 µV/m (–107 dBW/m2) w odległości 18,5 km (10 NM) na wysokości 30 m (100 ft) nad płaszczyzną poziomą zawierającą próg | ||||
|
|
| Kategoria II: nie mniej niż 100 µV/m (–106 dBW/m2) w odległości 18,5 km (10 NM) na wysokości 30 m (100 ft), zwiększając się do nie mniej niż 200 µV/m (–100 dBW/m2) na wysokości 15 m (50 ft) nad płaszczyzną poziomą zawierającą próg | ||||
|
|
|
| Kategoria III: nie mniej niż 100 µV/m (–106 dBW/m2) w odległości 18,5 km (10 NM), zwiększając się do nie mniej niż 200 µV/m (–100 dBW/m2) na wysokości 6 m (20 ft) ponad płaszczyzną poziomą zawierającą próg, na wysokości 4 m (12 ft) wzdłuż drogi startowej i 300 m (1000 ft) od progu w kierunku radiolatarni 100 µV/m (–106 dBW/m2) | |||
| Limity alarmowe monitorów: | 3.1.3.11 | DDM, przemieszczenie | Monitor musi uruchomić alarm przy przesunięciu linii kursu od osi drogi startowej przy wartości równej lub większej |
| √ | √ |
| – ustawienie osi kierunku | niż następujące odległości w punkcie odniesienia ILS: Kategoria I: 10,5 m (35 ft) | 2 m | ||||
| Kategoria II: 7,5 m (25 ft) | 1 m | |||||
| Kategoria III: 6 m (20 ft) | 0,7 m | |||||
| – czułość przemieszczania | DDM, przemieszczenie | Monitor musi uruchomić alarm przy zmianie czułości przemieszczania o wartość różniącą się od wartości nominalnej o więcej niż: |
| |||
| Kategoria I: 17% | +/–4% | |||||
| Kategoria II: 17% | +/–4% | |||||
| Kategoria III: 10% | +/–2% | |||||
| * Konwencja o międzynarodowym lotnictwie cywilnym, sporządzona w Chicago dnia 7 grudnia 1944 r. ** W – kontrola wdrożeniowa, O – kontrola okresowa | ||||||
Tabela T.3.5. Dopuszczalne wartości tolerancji parametrów radiolatarni ścieżki schodzenia systemu ILS
(ILS GP) sprawdzanych podczas kontroli z powietrza
| Parametr | Odniesienie do pkt Załącznika 10 Tom I do Konwencji* | Mierzona wielkość lub wymagana cecha | Dopuszczalne tolerancje | Dokładność pomiaru | Rodzaj Kontroli** | ||
| W | O | ||||||
| Kąt: – ustawienie | 3.1.5.1.2.1 | DDM, kąt | Kategoria I: +/–7,5% kąta nominalnego (Θ) Kategoria II: +/–7,5% Θ Kategoria III: +/–4% Θ | Kategoria I: 0,75% Θ Kategoria II: 0,75% Θ Kategoria III: 0,3% Θ | √ | √ | |
| – wysokość nad punktem odniesienia | 3.1.5.1.5 3.1.5.1.6 3.1.5.1.4 | Wysokość | Kategoria I,II i III: 15 m (50 ft)+3 m (10 ft) | 0,6 m | √ | – | |
| Czułość przemieszczania: wartość, | 3.1.5.6 | DDM, kąt | Kategoria I: +/–25% wartości nominalnej czułości przemieszczania Kategoria II: +/–20% wartości nominalnej czułości przemieszczania Kategoria III: +/–15% wartości nominalnej czułości przemieszczania Kategoria I: od 0,07 θ do 0,14 θ powyżej i poniżej ścieżki Kategoria II: a) 0,12 θ poniżej ścieżki, z tolerancją +0,02 θ b) 0,12θ powyżej ścieżki, z tolerancją +0,02 θ i –0,05 θ Kategoria III: 0.12 θ powyżej i poniżej ścieżki, z tolerancją +/–0,02 θ | Kategoria I: 2,5% Kategoria II: 2% Kategoria III: 1,5% | √ | √ | |
| symetria | |||||||
|
| |||||||
|
| |||||||
|
| |||||||
| Wyrazistość: – pod ścieżką | 3.1.5.6.5 | DDM, kąt | Na kącie pomiędzy płaszczyzną horyzontu, a 0,3 Θ, nie mniej niż 190 µA. Jeżeli 190 µA jest na kącie większym niż 0,45 Θ, musi być utrzymane do ≤ 0,45 Θ | +/–6 µA przy Iwej=190 µA | √ | √ | |
| – nad ścieżką | 3.1.5.3.1 | Musi osiągnąć co najmniej 150 µA i nie spaść poniżej 150 µA, póki nie zostanie osiągnięte 1,75 Θ | |||||
| Zabezpieczenie nad przeszkodami |
|
| Bezpieczna wyrazistość na 180 µA (praca normalna) lub na 150 µA (praca przy alarmie szerokim) |
| √ | √ | |
| Struktura ścieżki schodzenia | 3.1.5.4 | DDM | Kategoria I: | od granicy zasięgu do punktu „C”: 30 µA | Kategoria I: 3 µA | √ | √ |
|
|
|
| Kategoria II i III: | od granicy zasięgu do punktu „A”: 30 µA od punktu „A” do „B” liniowy spadek od 30 µA do 20 µA od punktu „B” do punktu odniesienia: 20 µA | Kategoria II i III: 2 µA | ||
| Modulacja: – głębokość | 3.1.5.5.1 | Głębokość modulacji | 37,5% do 42,5% dla każdego sygnału modulującego (tonu) | 0,5% | √ | √ | |
| – zasięg użytkowy | 3.1.5.3.1 3.1.5.3.2 Dodatek C, Rys. C-10 |
| Poprawna praca standardowej instalacji pokładowej w sektorach 8 stopni w azymucie, po każdej stronie centralnej linii ścieżki schodzenia ILS, na minimalnej odległości 18,5 km (10 NM) aż do wartości 1,75 θ i 0,45 θ powyżej horyzontu lub do kąta o wartości 0,30 θ, w sposób wymagany dla zagwarantowania procedury przechwycenia ścieżki schodzenia >400 µV/m (–95 dBW/m2) |
| √ | √ | |
| – natężenie pola elektrycznego (gęstość mocy) |
|
| +/–3 dB |
|
| ||
| Limity alarmowe monitorów: – kąt | 3.1.5.7 | DDM, kąt | Monitor musi wywołać alarm przy zmianie kąta, którego wielkość przekroczy wartość kąta ścieżki schodzenia ILS poza wartość θ w przedziale – 0,075 θ do + 0,10 θ | +/–4 µA | √ | √ | |
| – czułość przemieszczania |
| DDM, kąt | Kategoria I: | Monitor musi wywołać alarm przy zmianie kąta między ścieżką schodzenia a linią poniżej ścieżki schodzenia odpowiadającej wartości 75 µA o więcej niż 0,0375 θ | +/–4 µA | √ | √ |
| Kategoria II i III: | Monitor musi wywołać alarm przy zmianie czułości przemieszczania o więcej niż 25% wartości nominalnej | +/–1 dB | |||||
| * Konwencja o międzynarodowym lotnictwie cywilnym, sporządzona w Chicago dnia 7 grudnia 1944 r. ** W – kontrola wdrożeniowa, O – kontrola okresowa | |||||||
Tabela T.3.6. Dopuszczalne wartości tolerancji parametrów systemów wspomagających opartych na urządzeniach naziemnych (GBAS) sprawdzanych podczas kontroli z powietrza
| Parametr | Odniesienie do pkt Załącznika 10 Tom I do Konwencji* | Odniesienie do Doc 8071 Tom II** | Mierzona wielkość lub wymagana cecha | Dopuszczalne tolerancje | Dokładność pomiaru | Rodzaj kontroli*** | |
| W | O | ||||||
| Dane FAS (Final Approach Segment) – segmentu podejścia końcowego | Załącznik B pkt 3.6.4.5 | pkt 4.3.4 | Ścieżka FAS | Zgodnie z opisem FAS | – | √ |
|
| Procedura zatwierdzania | – | 5.3 | – | – | subiektywna | √ |
|
| Tłumienie zakłóceń | Załącznik B pkt 3.7 | 4.3.6 | Poziom sygnału zakłócającego | < Zdefiniowany poziom zakłóceń | +/– 3 dB | √ |
|
| Pokrycie VDB (VHF Data Broadcast) | Załącznik B pkt 3.7.3.5.4.4 | 4.3.7 4.3.84.3.9 4.3.10 | Gęstość mocy |
| +/– 3 dB | √ |
|
| Natężenie pola spolaryzowanego poziomo GBAS/H | >–99dBW/m2 do 27dBW/m2 | ||||||
| Natężenie pola spolaryzowanego eliptycznie GBAS/E | >–103dBW/m2 do 31dBW/m2 | ||||||
| Nagłówek bloku depeszy (identyfikacja GBAS) | Załącznik B pkt 3.6.3.4.1 | 4.3.14 | Identyfikacja urządzenia | Dokładne dopasowanie | – | √ |
|
| Zawartość danych wykorzystywanych | Załącznik B pkt 3.6.4 | 4.3.15 4.3.16 | Zawartość danych w wiadomości | Dokładne dopasowanie | – | √ |
|
| Dokładność położenia (opcjonalnie) | – | 4.3.17 4.3.18 | Pozycja | 4 m pionowo 16 m poprzecznie | 1 m | √ |
|
| * Konwencja o międzynarodowym lotnictwie cywilnym, sporządzona w Chicago dnia 7 grudnia 1944 r. ** Doc 8071 – Manual on Testing of Radio Navigation Aids *** W – kontrola wdrożeniowa, O – kontrola okresowa | |||||||
Załącznik nr 3
SPOSÓB OKREŚLANIA I WYZNACZANIA GRANIC PRZESTRZENNYCH POWIERZCHNI OGRANICZAJĄCYCH ZABUDOWĘ
Rys. 1. Kształt powierzchni ograniczających zabudowę wokół dookólnych lotniczych urządzeń naziemnych – widok trójwymiarowy*
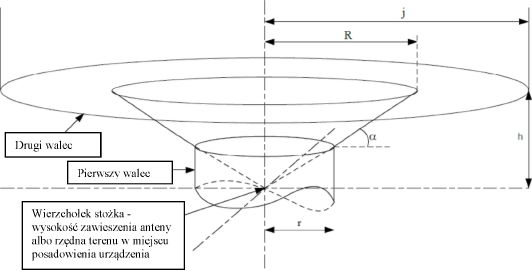
* Objaśnienia symboli określono w tabeli 3.
Rys. 2. Kształt powierzchni ograniczających zabudowę wokół dookólnych lotniczych urządzeń naziemnych – przekrój pionowy*
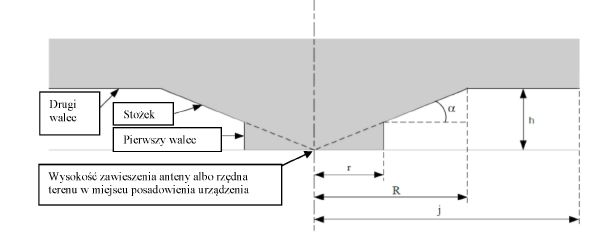
* Objaśnienia symboli określono w tabeli 3.
Rys. 3. Kształt powierzchni ograniczającej zabudowę wokół kierunkowych lotniczych urządzeń naziemnych*
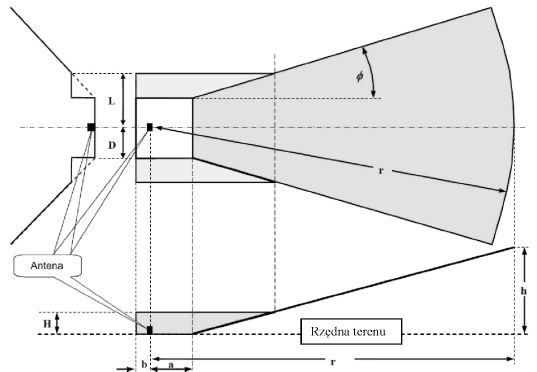
* Objaśnienia symboli określono w tabeli 4.
Rys. 4. Kształt powierzchni ograniczających zabudowę wokół kierunkowych lotniczych urządzeń naziemnych – widok trójwymiarowy*
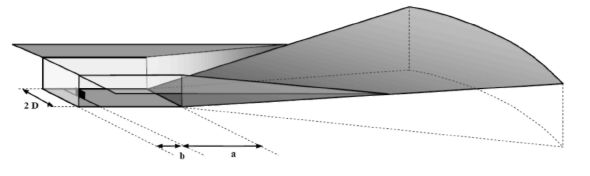
* Objaśnienia symboli określono w tabeli 4.
Tabela 1. Wymiary powierzchni ograniczających zabudowę wokół dookólnych lotniczych urządzeń naziemnych rodzaju COM zlokalizowanych poza granicami lotniska
| Rodzaj komunikacji | Alpha (α – stożek) (0) | Zasięg (R – stożek) (m) | Zasięg (r – walec) (m) |
| VHF Komunikacja Tx – nadawanie | 1.0 | 1000 | 300 |
| VHF Komunikacja Rx – odbiór | 1.0 | 1000 | 300 |
Tabela 2. Wymiary powierzchni ograniczających zabudowę wokół dookólnych lotniczych urządzeń naziemnych rodzaju SUR
| Typ urządzeń dozorowania | Alpha (α – stożek) (0) | Zasięg (R – stożek) (m) | Zasięg (r – walec) (m) |
| PSR | 0.25 | 15000 | 500 |
| SSR | 0.25 | 15000 | 500 |
Tabela 3. Wymiary powierzchni ograniczających zabudowę wokół dookólnych lotniczych urządzeń naziemnych rodzaju NAV
| Typ urządzeń nawigacyjnych | Zasięg (r – walec) (m) | Alpha (α – stożek) (0) | Zasięg (R – stożek) (m) | Zasięg (j – walec)(m) jedynie dla turbin wiatrowych | Wysokość walca j (h – wysokość) (m) jedynie dla turbin wiatrowych |
| DME N | 300 | 1.0 | 3000 | N/A | N/A |
| DVOR | 600 | 1.0 | 3000 | 10000 | 52 |
| GBAS naziemny odbiornik referencyjny | 400 | 3.0 | 3000 | N/A | N/A |
| GBAS stacja VDB | 300 | 0.9 | 3000 | N/A | N/A |
| NDB | 200 | 5.0 | 1000 | N/A | N/A |
| Uwaga: wartości związane z turbinami wiatrowymi należy odnosić do czubka łopaty turbiny w jej najbardziej pionowym ustawieniu. | |||||
Tabela 4. Wymiary powierzchni ograniczających zabudowę wokół kierunkowych lotniczych urządzeń naziemnych rodzaju NAV
| Typ urządzeń nawigacyjnych | a (m) | b (m) | h (m) | r (m) | D (m) | H (m) | L (m) | Φ (0) |
| ILS LLZ (średni szyk antenowy jednoczęstotliwościowy) | Odległość od progu pasa | 500 | 70 | a+6000 | 500 | 10 | 2300 | 30 |
| ILS LLZ (średni szyk antenowy dwuczęstotliwościowy) | Odległość od progu pasa | 500 | 70 | a+6000 | 500 | 20 | 1500 | 20 |
| ILS GP M-Typ (podwójna częstotliwość) | 800 | 50 | 70 | 6000 | 250 | 5 | 325 | 10 |
| DME (antena kierunkowa) | Odległość od progu pasa | 20 | 70 | a+6000 | 600 | 20 | 1500 | 40 |
| Uwagi: – dla lotniczego urządzenia naziemnego rodzaju NAV położonego w granicach lotniska wartości (a) i (b) należy przyjąć jako rozpoczynające się przy rzędnej terenu w miejscu posadowienia podstawy anteny urządzenia i mierzone wzdłuż powierzchni ziemi; dla pozostałych urządzeń wartości (a) i (b) należy przyjąć jako rozpoczynające się u podstawy anteny i mierzone wzdłuż powierzchni ziemi, – dla lotniczego urządzenia naziemnego rodzaju NAV położonego w granicach lotniska wartość (r) ma swój początek przy rzędnej terenu w miejscu posadowienia podstawy anteny urządzenia i jest odniesiona do płaszczyzny horyzontalnej; dla pozostałych urządzeń wartość (r) ma swój początek u podstawy anteny i jest odniesiona do płaszczyzny horyzontalnej, – kąt Φ jest odniesiona do płaszczyzny horyzontalnej. | ||||||||
Rys. 5. Kształt i wymiary powierzchni ograniczających zabudowę wokół dookólnych lotniczych urządzeń naziemnych rodzaju MET przeznaczonych do obserwacji meteorologicznych
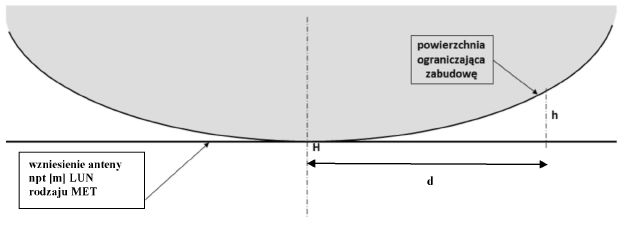
Opis: Ograniczenie dotyczy obiektów, których co najmniej część znajduje się powyżej granic przestrzennych powierzchni ograniczającej zabudowę.
Kształt powierzchni jest opisany wzorem:

gdzie:
α – współczynnik, wyrażony w radianach
d – odległość od lotniczych urządzeń naziemnych, wyrażona w kilometrach
h – wysokość powierzchni ograniczającej zabudowę w odległości d od radaru, wyrażona w metrach nad poziomem morza
H – wzniesienie anteny lotniczych urządzeń naziemnych, wyrażone w metrach nad poziomem morza
Maksymalny zasięg powierzchni ograniczającej zabudowę dla lotniczych urządzeń naziemnych rodzaju MET wynosi d = 30 000 metrów.
- Data ogłoszenia: 2020-12-04
- Data wejścia w życie: 2020-12-05
- Data obowiązywania: 2023-02-17
- Dokument traci ważność: 2023-06-21

REKLAMA
Dziennik Ustaw
REKLAMA
REKLAMA